CHƯƠNG 2 : CU TO ROBOT CÔNG NGHIP
GV: Th.S Nguyn Tn Phúc.
Tel: 01267102772.
Email:phucnt@hcmuaf.edu.vn
CHƯƠNG 2 : CU TO ROBOT CÔNG NGHIP
GV: Th.S Nguyn Tn Phúc.
Tel: 01267102772.
Email:phucnt@hcmuaf.edu.vn
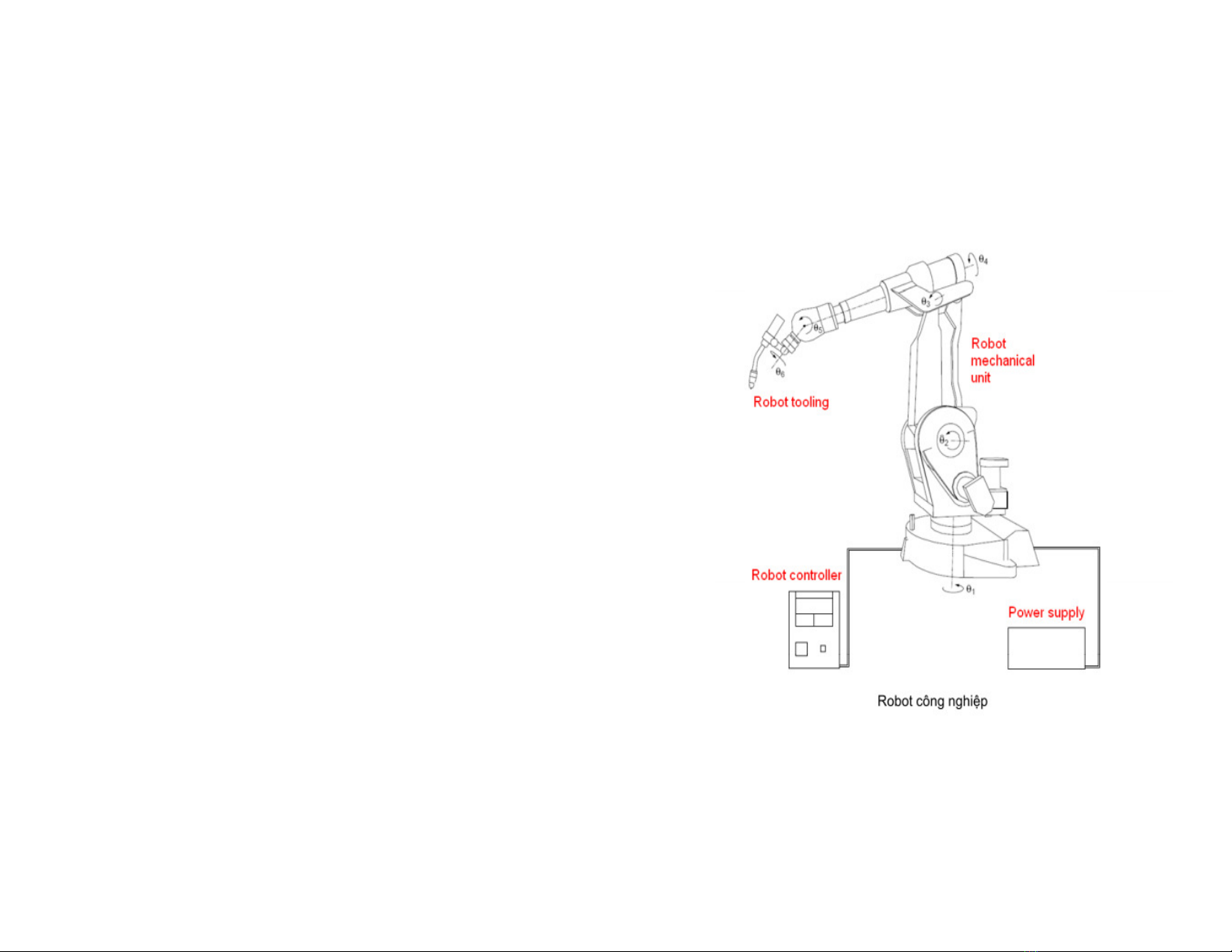
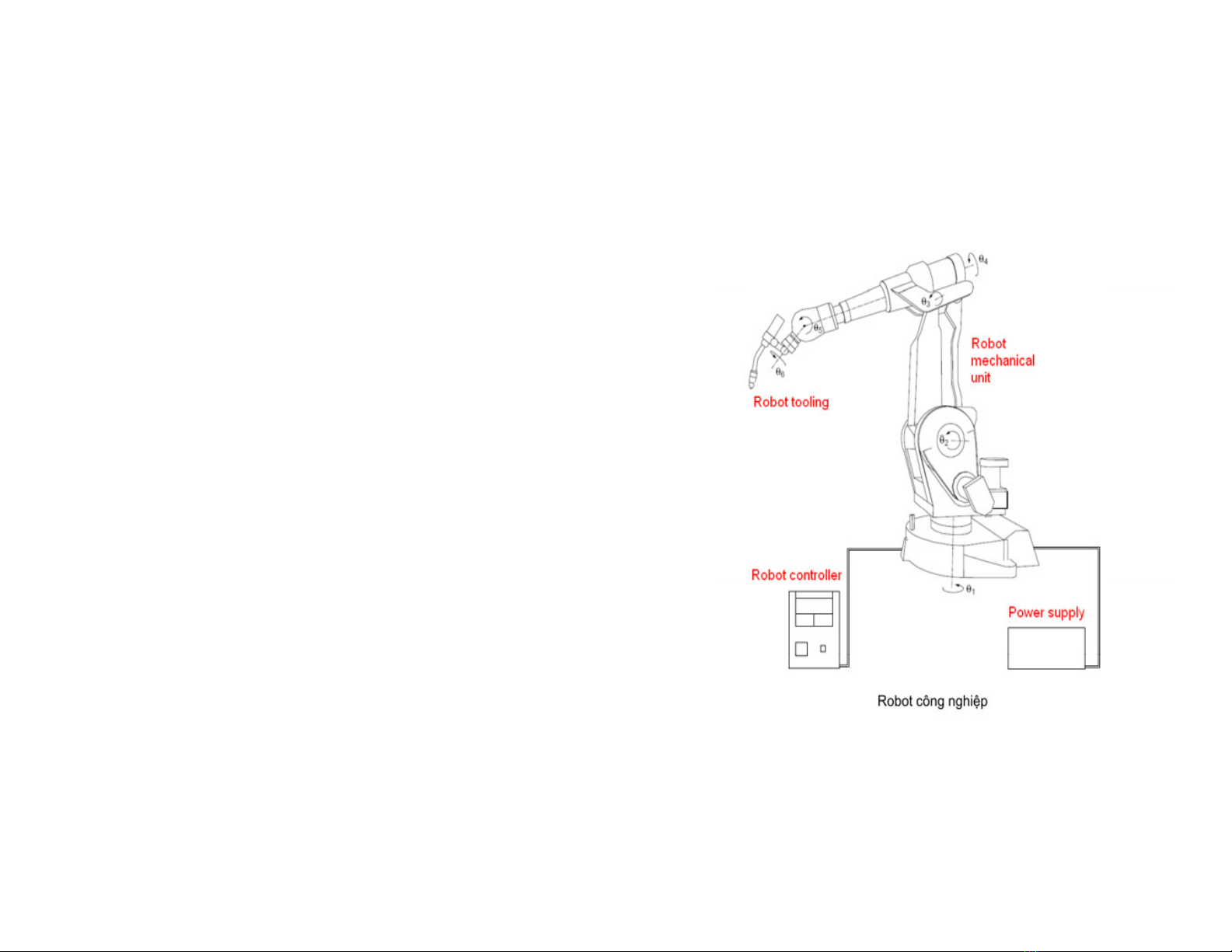
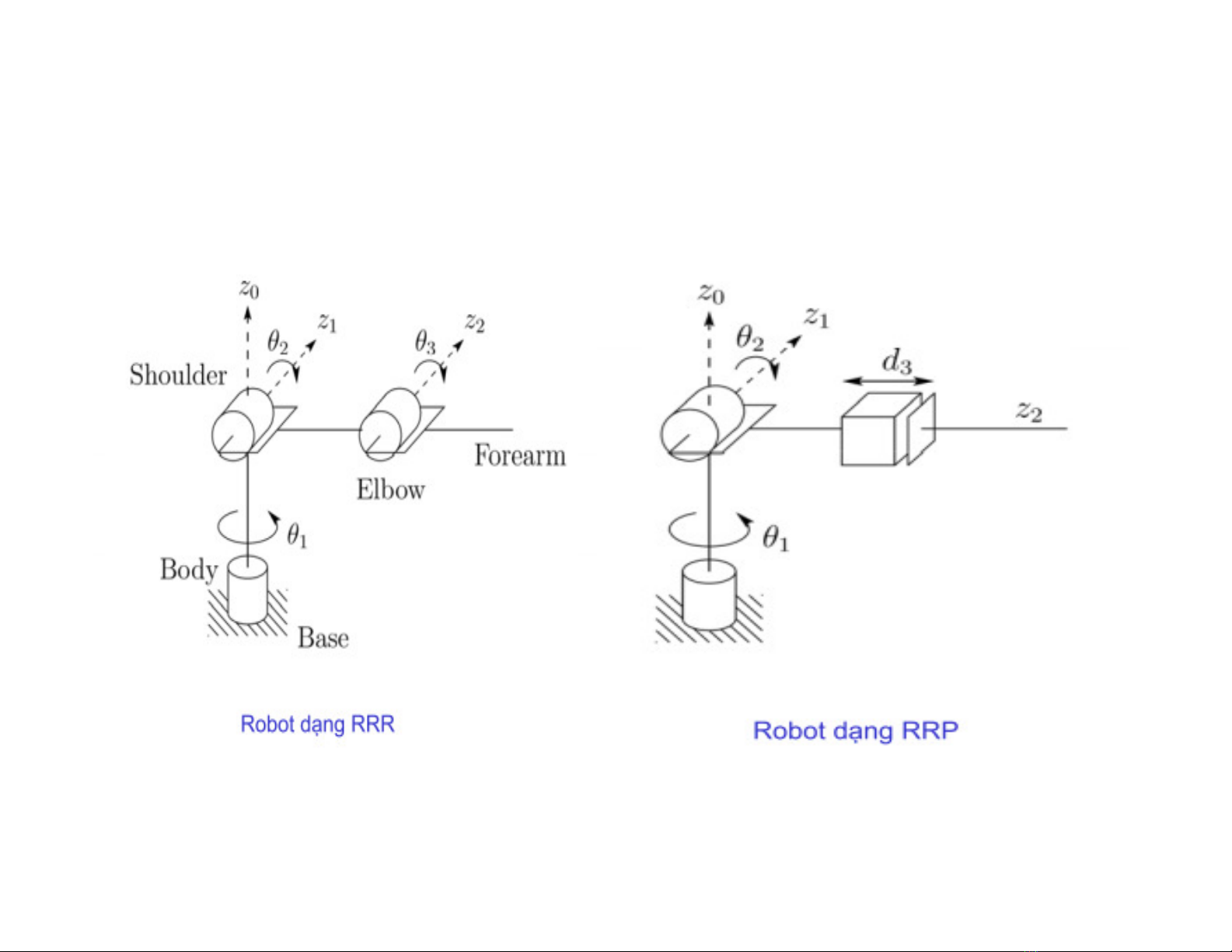
Kết cấu robot:
Robot công nghiệp được tạo thành từ nhiều khâu được liên kết với
nhau bằng các khớp động.
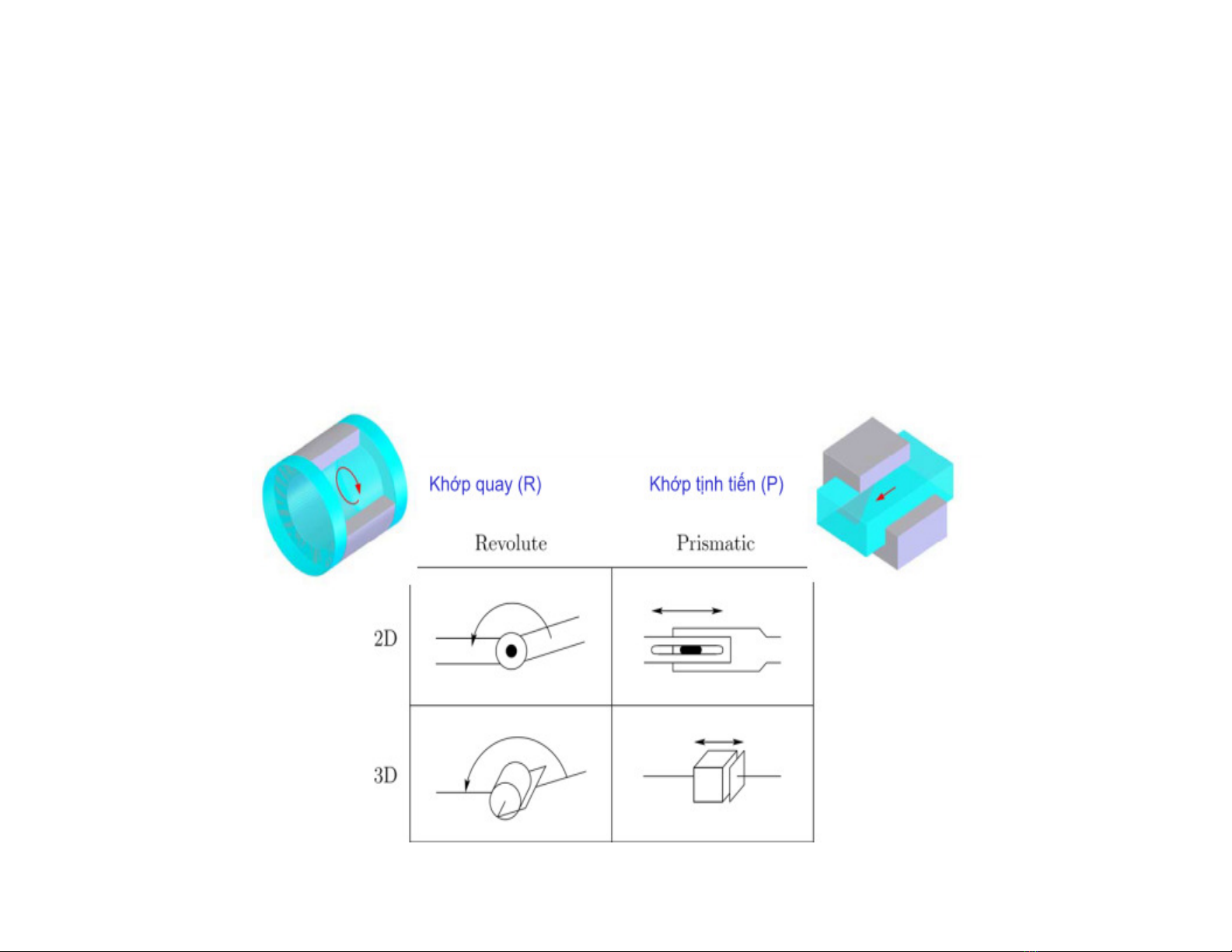
2 khớp động điển hình là : khớp tịnh tiến, khớp xoay.
Kết cấu robot:
Kết cấu robot:











![Đề thi Kỹ thuật lập trình PLC: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260121/lionelmessi01/135x160/85491768986870.jpg)

![Đề thi cuối học kì 1 môn Máy và hệ thống điều khiển số năm 2025-2026 [Kèm đáp án chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/dangnhuy09/135x160/4401768640586.jpg)




![Tự Động Hóa Thủy Khí: Nguyên Lý và Ứng Dụng [Chi Tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kexauxi10/135x160/27411767988161.jpg)






