http://www.ebook.edu.vn
75
Đối với hầu hết các hệ thống gia nhiệt thì đặc tính ở trạng thái xác lập được quan tâm là chủ yếu.
Xét lại phương trình truyền nhiệt của thiết bị gia nhiệt trạng thái xác lập:
)()( 1221 CCpCCHHpHH TTCTTC
Ta suy ra
)( 2112 HH
pCC
pHH
CC TT
C
C
TT
(3.102)
Có thể thấy quan hệ phi tuyến giữa biến điều khiển trực tiếp c và biến cần điều khiển TC2, bởi ngay cả
khi các biến nhiễu (H, TC1, TH1) và các hệ số nhiệt dung riêng (CpH, CpC) được coi như không thay đổi
thì TH2 cũng đã phụ thuộc vào H. Đặt công suất truyền nhiệt q là biến trung gian:
)( 21 HHpHH TTCq
(3.103)
ta có thể viết:
12 C
pCC
CT
C
q
T
(3.104)
nhìn vào phương trình (3.104), ta có thể nhận ra ngay biến điều khiển cần chọn cho tuyến tính hoá là u =
q/C:
12
1
C
pC
CTu
C
T (3.105)
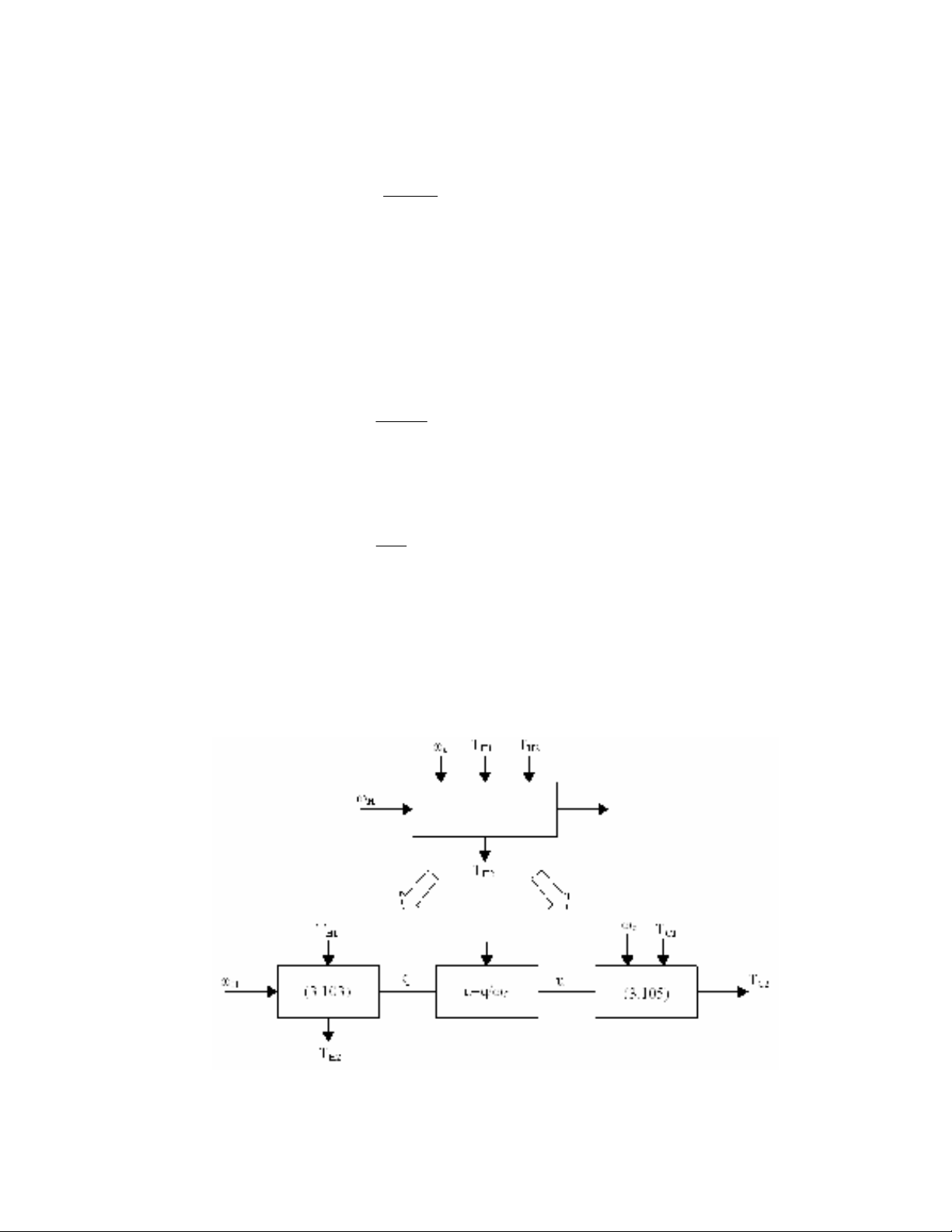
mô hình nhận được sau khi biến đổi gồm hai phương trình tuyến tính (3.103) và (3.105) và một phương
trình phi tuyến u = q/C. Hiểu theo một cách khác, ta sử dụng phép biến đổi để tách một mô hình phi
tuyến thành hai mô hình tuyến tính đơn giản hơn.. Thực tế sách lược điều khiển được áp dụng cho các
thiết bị gia nhiệt dầu nóng chính là dựa trên mô hình dẫn suất này. Hiệu quả cách làm này được minh hoạ
trên hình 3.17.
Hình 3.17. Tuyến tính hoá mô hình thiết bị gia nhiệt qua phép biến đổi.
http://www.ebook.edu.vn
76
3.6. Một số ví dụ quá trình tiêu biểu
3.6.1. Chuỗi ba thiết bị phản ứng liên tục đẳng nhiệt
* Phân tích bài toán
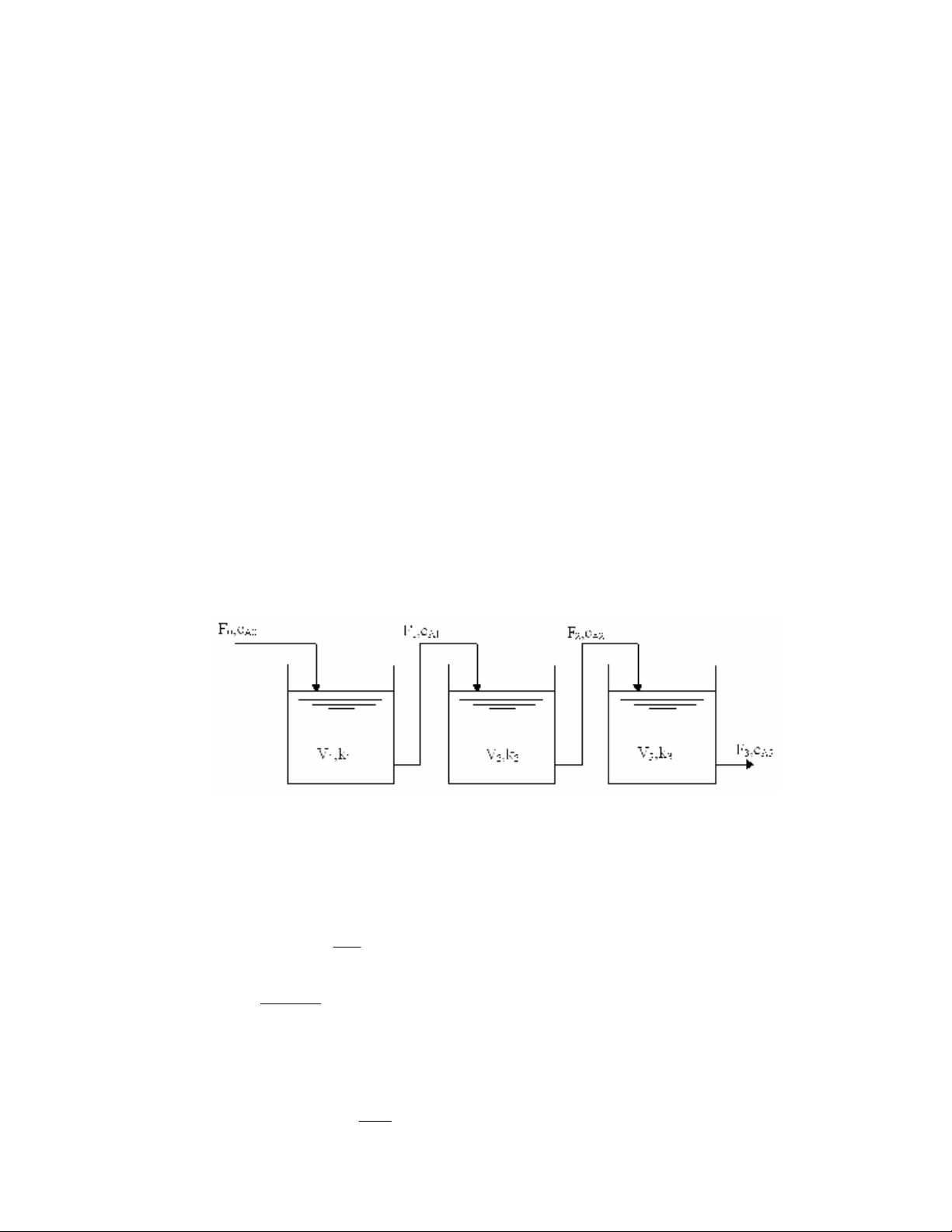
Thiết bị phản ứng đẳng nhiệt bây giờ được mở rộng thành chuỗi gồm ba thiết bị nối tiếp, như
minh hoạ trên hình 3.25. Sản phẩm B được tạo thành qua phản ứng nguyên liệu A trong các thiết bị khuấy
trộn lý tưởng. Nhiệt độ trong các thiết bị khuấy trộn có thể khác nhau, tuy nhiên ta coi không thay đổi do
phản ứng là đẳng nghiệt. Ta giả thiết khối lượng riêng của các dung dịch trong các thiết bị không khác
nhau đáng kể. Tốc độ phản ứng riêng của mỗi thiết bị (k1, k2, k3) phụ thuộc nhiệt độ và nồng độ, vì thế
khác nhau. Lưu ý rằng ở đây ta không quan tâm trực tiếp đến nồng độ của B trong các thiết bị bởi đại
lượng này được dẫn suất từ nồng độ của A qua phương trình cân bằng vật chất toàn phần và phương trình
vật chất viết cho cấu trúc A.
Ta đặt ra mục đích sử dụng mô hình ở đây là phục vụ thiết kế sách lược cũng như thuật toán điều
khiển và mô phỏng kiểm chứng. Cũng có thể dễ dàng nhận thấy có 6 biến ra là V1, V2, V3, cA1, cA2 và cA3.
Các biến vào trước hết là các lưu lượng F0, F1, F2 và F3, cũng như nồng độ cA0 của dòng nguyên liệu. Tuỳ
theo yêu cầu của bài toán điều khiển, lưu lượng vào F0 (cũng như lưu lượng ra F3) có thể được coi là biến
điều khiển hoặc nhiễu, và lưu lượng F3 cũng có thể đồng thời đóng vai trò vừa là biến ra vừa là biến vào.
Nồng độ cA0 của dòng nguyên liệu chắc chắn được coi là nhiễu. Khối lượng riêng, tốc độ phản ứng riêng
và nhiệt độ tại các bình được coi là tham số quá trình tuy nhiên sự thay đổi của chúng có thể được xếp
chung vào nhiễu quá trình hoặc sai lệch mô hình.
Hình 3.25. Chuỗi thiết bị phản ứng liên tục đẳng nhiệt.
* Xây dụng các phương trình mô hình
Giả thiết các phản ứng có bậc n. Với mỗi thiết bị ta có thể viết ngay các phương trình cân bằng vật
chất. Ví dụ cho thiết bị gia nhiệt thứ nhất ta có:
10
1FF
dt
dV (3.106)
n
AAA
AckVcFcF
dt
cVd )(
)(
1111100
11 (3.107)
Khai triển đạo hàm vế trái của phương trình thứ hai và sau đó thay thế phương trình thứ nhất vào, ta nhận
được
n
AAA
A
AckVcFcF
dt
dc
VFFc )()( 1111100
1
1101
http://www.ebook.edu.vn
77
Hay rút gọn hơn
0
1
0
111
1
0
1)( A
n
AA
Ac
V
F
ckc
V
F
dt
dc (3.108)
Tương tự (3.106) và (3.108), ta có các phương trình mô hình tương ứng với hai thiết bị còn lại:
21
2FF
dt
dV (3.109)
23
3FF
dt
dV (3.110)
1
2
1
2212
2
12 )( A
n
AA
Ac
V
F
ckc
V
F
dt
dc (3.111)
2
3
2
333
3
2
3)( A
n
AA
Ac
V
F
ckc
V
F
dt
dc (3.112)
Mô hình nhận được chứa tổng cộng 6 phương trình vi phân phi tuyến thể hiện quan hệ giữa 11
biến: (3.106), (3.3.108) – (3.112). Tham số mô hình giờ đây bao gồm các tốc độ phản ứng riêng (k1, k2,
k3) và bậc của phản ứng n.
* Phân tích bậc tự do
Mô hình cho hệ thống dãy ba thiết bị phản ứng đẳng nhiệt có 5 bậc tự do, trong khi có 6 biến ra.
Điều đó có nghĩa là ta chỉ có thể thiết kế tối đa 5 vòng điều khiển. Tuy nhiên số biến điều khiển nhiều lắm
là 4, vì thế chỉ có thể điều khiển độc lập tối đa 4 biến ra. Nếu mức chất lỏng trong các thiết bị được chọn
điều khiển thì chỉ còn một trong ba biến nồng độ có thể chọn là biến được điều khiển. Tuỳ theo yêu cầu
của bài toán điều khiển, nếu một trong hai biến lưu lượng (F0, F3) cũng lại được coi là nhiễu thì bài toán
điều khiển chất lượng sản phẩm sẽ không được giải quyết.
Bây giờ ta xét hệ thống điều khiển mức chất lỏng trong các thiết bị đã được giữ cố định bởi ba bộ
điều khiển mức. Khi đó cả 4 biến lưu lượng phụ thuộc lẫn nhau theo nguyên lý cân bằng khối lượng, tức
là số biến độc lập giảm đi 3. Giải thích theo một cách khác thì việc đưa vào 3 vòng điều khiển mức cũng
chính là bổ sung 3 phương trình độc lập. Trong khi đó, 3 biến chủ đạo cho các giá trị mức cũng được cần
thêm vào. Số bậc tự do của hệ thống không hề thay đổi, nhưng ý nghĩa số bậc tự do đã thay đổi.
* Tuyến tính hoá mô hình
Để đơn giản hoá trong việc xây dựng mô hình tuyến tính, ở đây ta cũng giả thiết thể tích trong mỗi
thiết bị phản ứng đã được giữ ổn định bằng một vòng điều khiển mức độc lập. Như vậy cũng có nghĩa là
F1 = F2 = F3 = F0 = F. Tiếp theo, giả sử phản ứng là bậc 2, tức n = 2. ở trạng thái xác lập ta có:
0A
1
2
1A11A
1
c
V
F
)c(kc
V
F
0
1
2
2
222
2
)(0 AAA c
V
F
ckc
V
F (3.113)
http://www.ebook.edu.vn
78
2
3
2
333
3
)(0 AAA c
V
F
ckc
V
F
giải lần lượt từng phương trình bậc 2 trong (3.113) và chỉ lấy nghiệm dương ta nhận được các giá trị
321 ,, AAA ccc tại điểm làm vệc.
Đặt các biến chênh lệch
3
3
2
1
3
2
1
0,,, xy
c
c
c
x
x
x
xcdFu
A
A
A
A
Khai triển Taylor cho các phương trình (3.108), (3.111), và (3.112), ta có hệ phương trình vi phân tuyến
tính
d
V
F
u
V
cc
xckx
V
F
dt
dx AA
A
11
10
1111
1
12
(3.114)
1
22
21
2222
2
22x
V
F
u
V
cc
xckx
V
F
dt
dx AA
A
(3.115)
2
33
32
3333
3
32x
V
F
u
V
cc
xckx
V
F
dt
dx AA
A
(3.116)
Hay viết gọn lại dưới dạng mô hình trạng thái
d
V
F
u
V
cc
V
cc
V
cc
x
V
F
V
F
x
AA
aA
AA
0
0
1
0
0
1
00
1
1
3
32
2
21
1
10
33
22
1
(3.117)
xy 100
trong đó
111
1
12A
ckVF
V
,
222
2
22A
ckVF
V
,
333
3
32A
ckVF
V
từ mô hình trạng thái tuyến tính (3.108) ta cũng có thể biến đổi sang mô hình ma trận truyền đạt. Tuy
nhiên, cách làm này ở đây khó cho ta cái nhìn sâu sắc về mặt vật lý. Nếu chỉ cần mô hình hàm truyền đạt
thì nên bắt đầu từ phương trình (3.114), (3.115), 3.116). Ta viết 3 phương trình này gọn lại sau đây:
dkukx
dt
dx
du 111
1
1222
2xkukx
dt
dx
du
(3.118)
2331
3xkukx
dt
dx
du
trong đó
http://www.ebook.edu.vn
79
111
10
12A
AA
uckVF
cc
k
,
111
12A
dckVF
F
k
222
21
22A
AA
uckVF
cc
k
,
222
22A
dckVF
F
k
333
32
32A
AA
uckVF
cc
k
,
333
32A
dckVF
F
k
Biến đổi Laplace cho cả hai vế của từng phương trình trong (3.118) và đưa về dạng chuẩn ta có:
)(
1
)(
1
)(
1
1
1
1
1sd
s
k
su
s
k
sx du
(3.119)
)(
1
)(
1
)( 1
2
2
2
2
2sx
s
k
su
s
k
sx du
(3.120)
)(
1
)(
1
)( 2
3
3
3
3
3sx
s
k
su
s
k
sx du
(3.121)
Thay thế lần lượt (3.120) và (3.119) vào (3.121), ta có:
)(
1
)(
11
)(
1
)()( 1
2
2
2
2
3
3
3
3
3sx
s
k
su
s
k
s
k
su
s
k
sxsy dudu
)(
1
)(
1)1)(1(
)(
)1)(1(1 1
1
1
1
32
32
32
32
3
3sd
s
k
su
s
k
ss
kk
su
ss
kk
s
kduddduu
)(
)1)(1)(1(
)(
)1)(1)(1(
)1()1)(1(
)(
321
321
)(
321
321132213 sd
sss
kkk
su
sss
kkkskkssk
sG
ddd
sG
dduduu
d
(3.122)
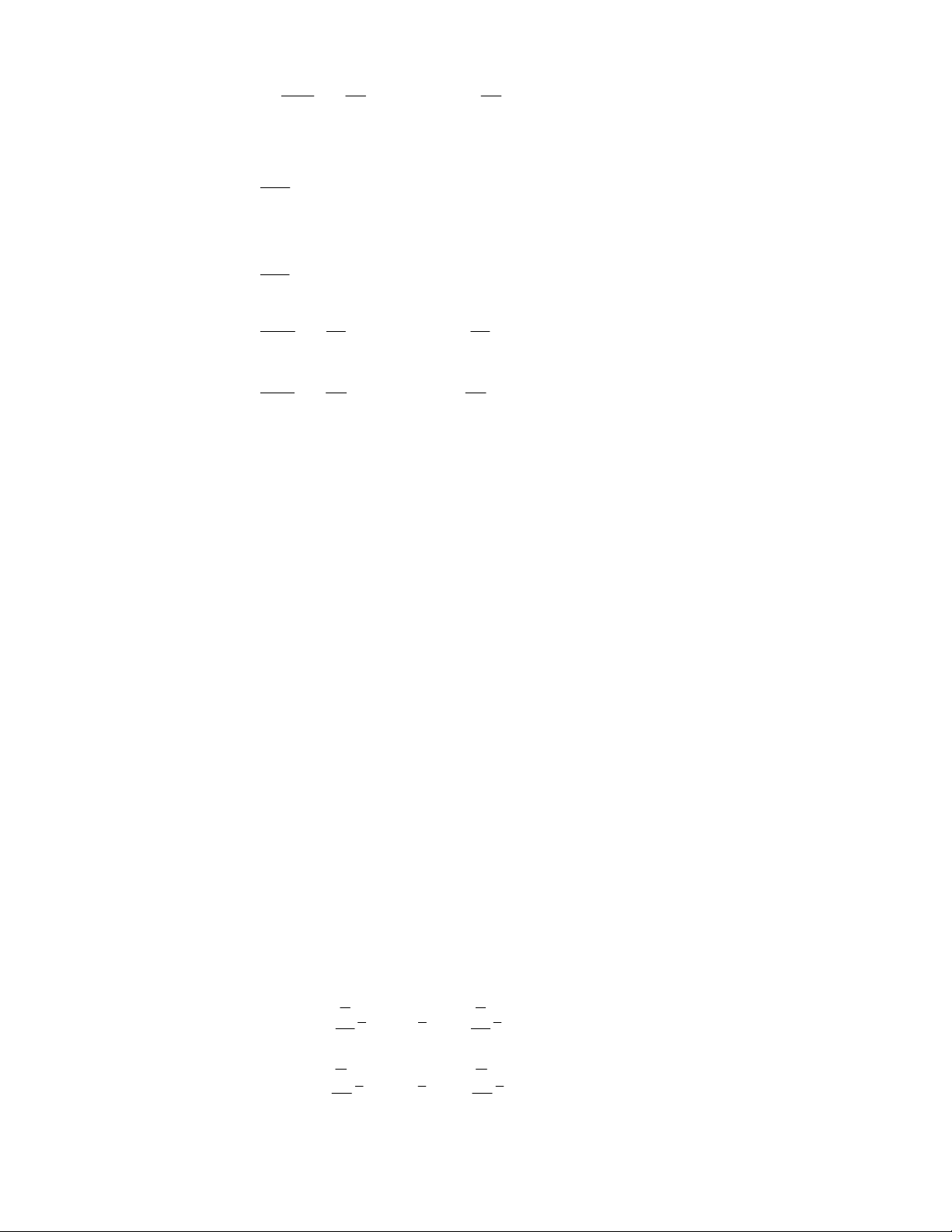
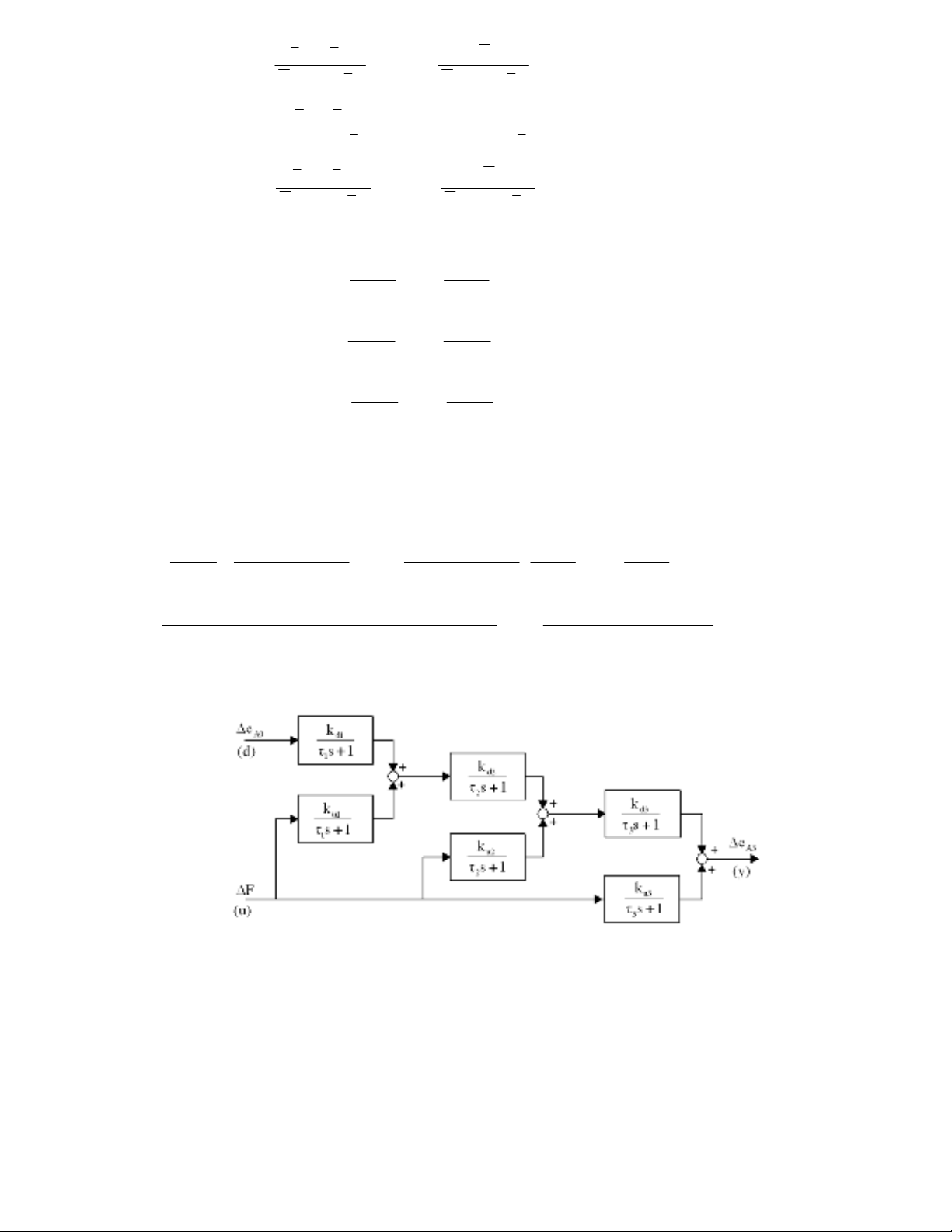
Hình 3.26. Sơ đồ khối mô hình chuỗi 3 bình phản ứng đẳng nhiệt.
Mô hình nhận được bao gồm G(s) và Gd(s), lần lượt là hàm truyền từ lưu lượng và từ nồng độ dòng vào
tới nồng độ sản phẩm. Có thể thấy, sự mắc nối tiếp các thiết bị phản ứng tạo nên một hệ bậc 3. Đối với
những hệ có quá trình tương tác phức tạp, không bao giờ ta cũng có thể tính toán hàm truyền cho cả hệ
một cách đơn giản như trên. Thay vì vậy, ta có thể sử dụng công cụ sơ đồ khối để biểu diễn và phân tích
hệ thống. Sơ đồ khối cho chuỗi 3 bình phản ứng biểu diễn trên hình 3.26.


![Các hệ thống điều khiển: Điều khiển quá trình gia công [chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131108/online_12/135x160/3991383877530.jpg)

![Bài Viết Tuyến tính tích hợp [chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130701/lilinz/135x160/5061372680353.jpg)
![Tuyến tính tích hợp: [Thêm từ khóa phụ/mô tả để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130623/sea123123/135x160/1504779_349.jpg)




















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)