Tra
ng
1
I. Đo t c đ đ ng c .ố ộ ộ ơ
1. M t s ph ng pháp đo t c đ đ ng cộ ố ươ ố ộ ộ ơ
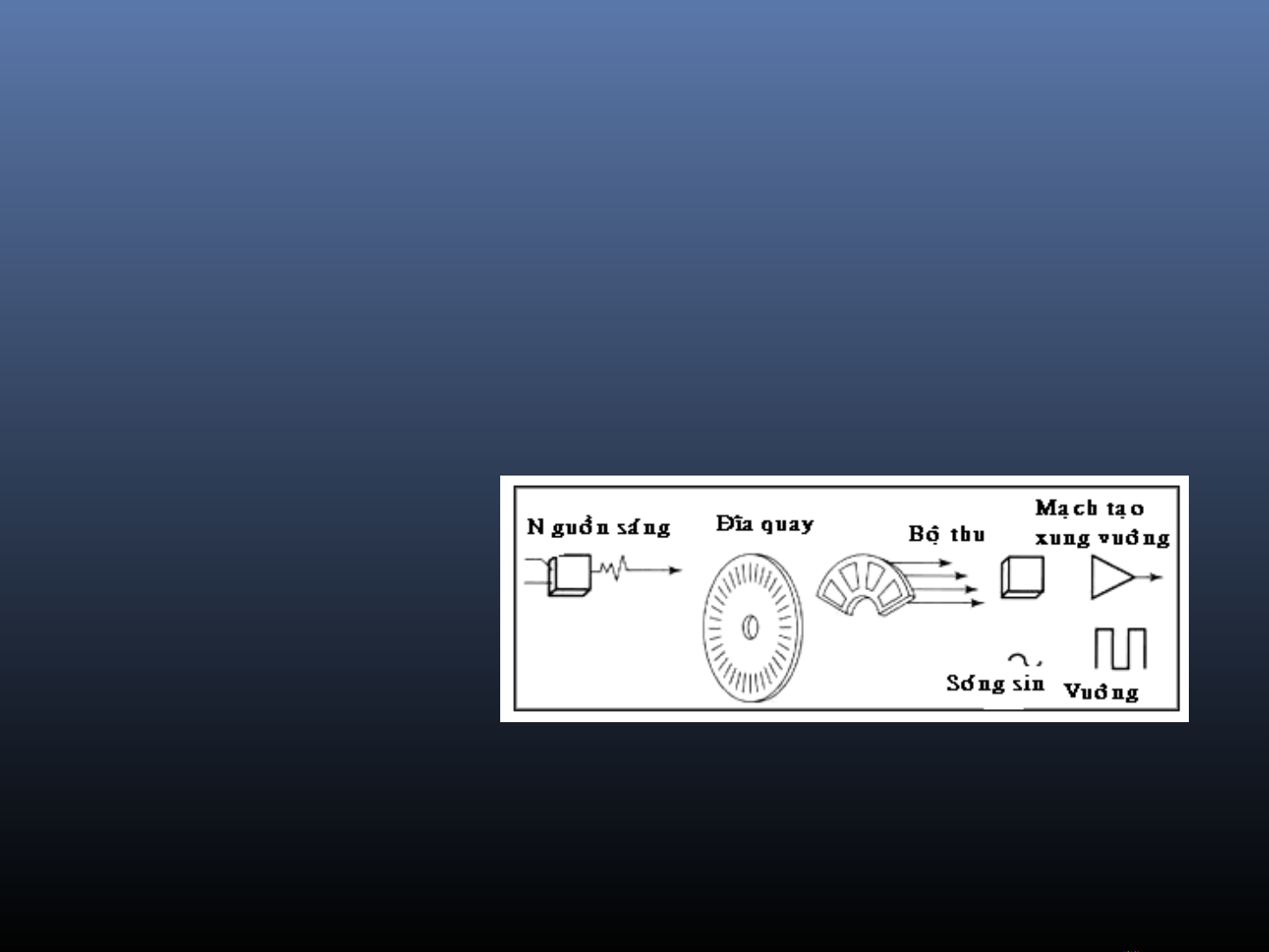
1.1 Dùng c m bi n quang đo t c đ v i đĩa mã hóa.ả ế ố ộ ớ
Encoder là thi t b có th phát hi n s chuy n đ ng hay v ế ị ể ệ ự ể ộ ị
trí c a v t. Encoder s d ng các c m bi n quang đ sinh ra ủ ậ ử ụ ả ế ể
chu i xung, t đó chuy n sang phát hi n s chuy n đ ng.ỗ ừ ể ệ ự ể ộ
Khuy t đi m: c n ế ể ầ
nhi u l đ nâng cao ề ỗ ể
đ chính xác nên d ộ ễ
làm h h ng đĩa quayư ỏ
Ch ng 5. Đo v n t c, gia t c và đ rungươ ậ ố ố ộ
Đo l ng không đi nườ ệ
Tra
ng
2
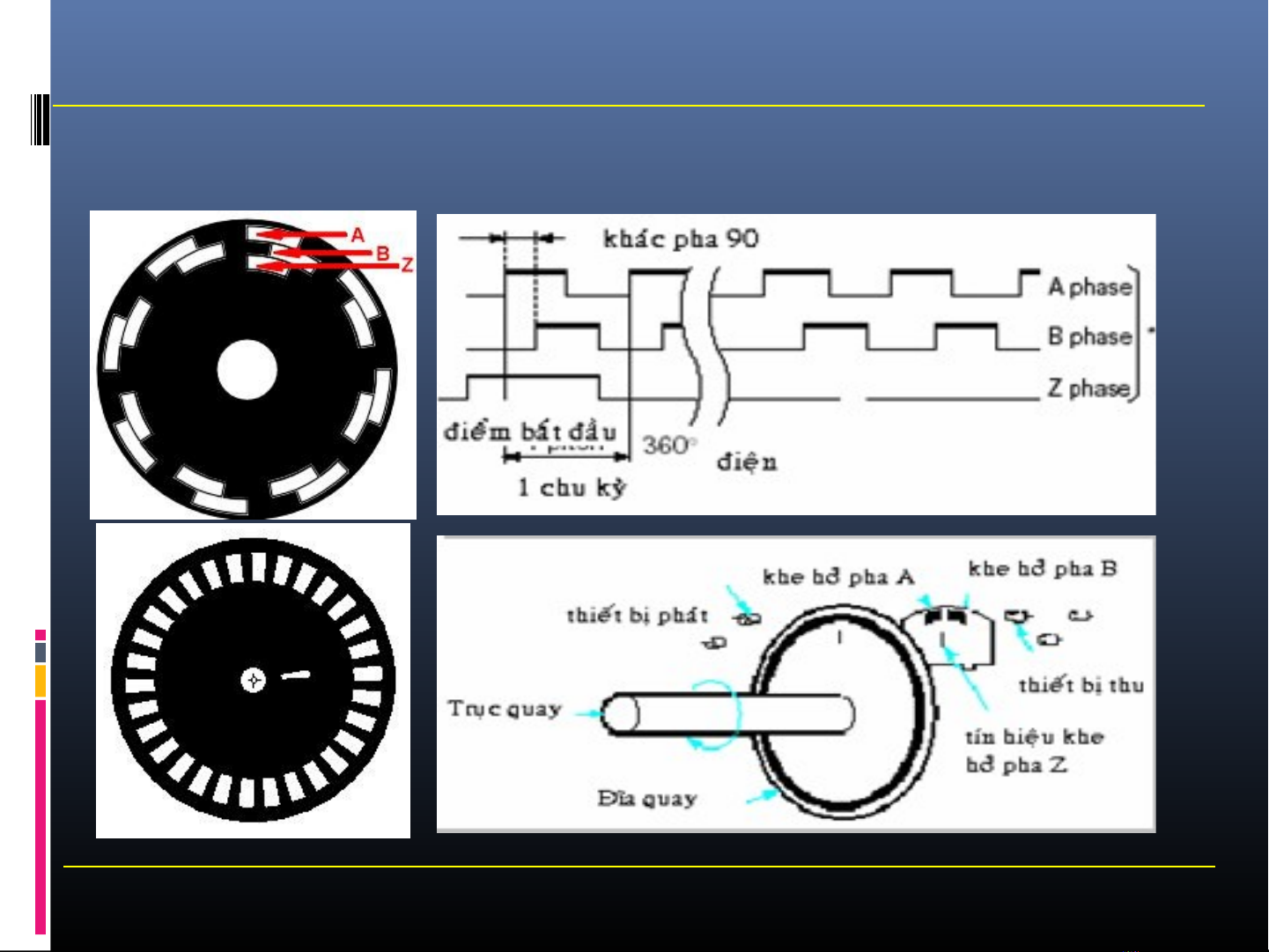
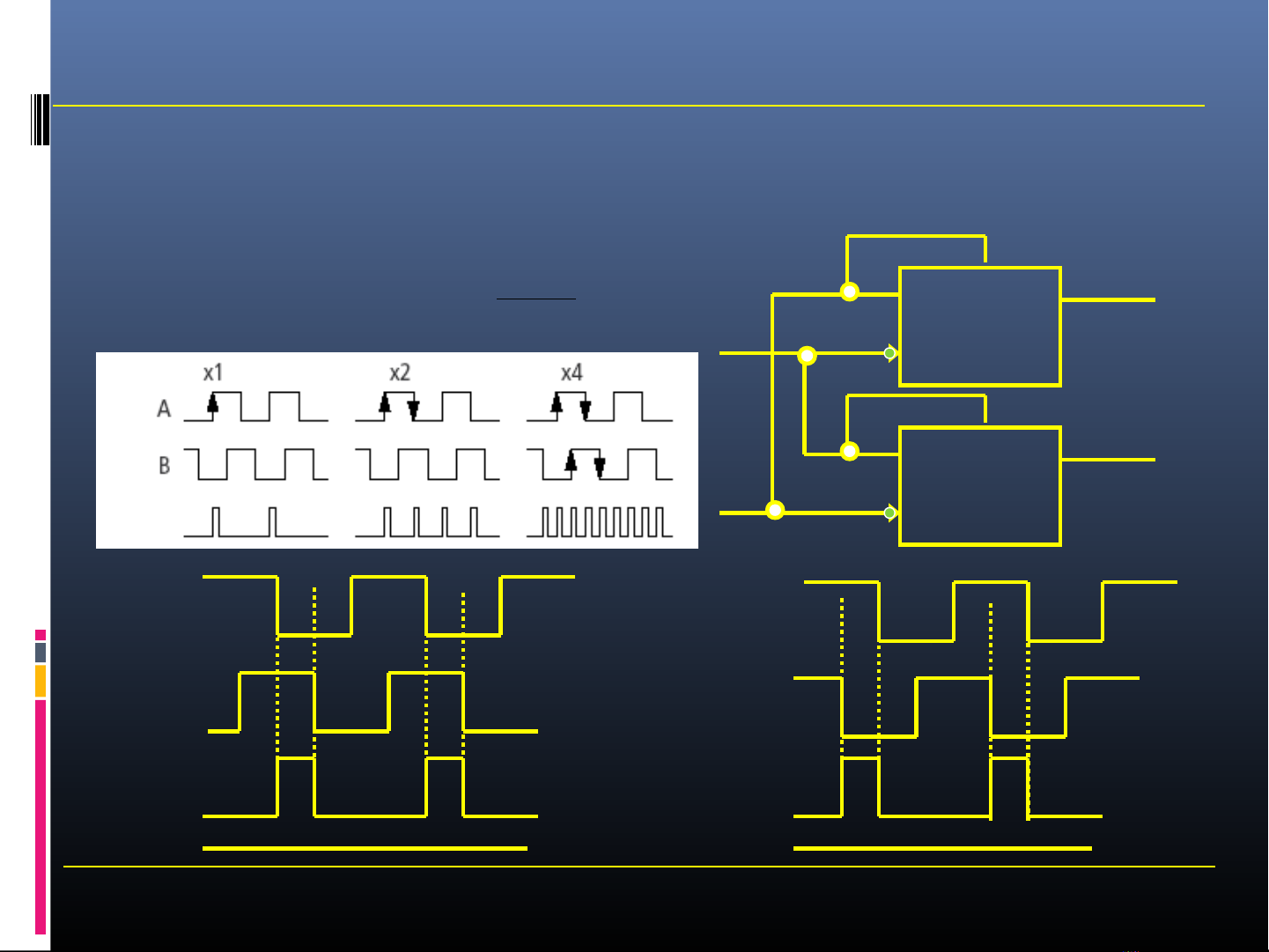
1.1.1 Đĩa mã hóa t ng đ i:ươ ố
Ch ng 5. Đo v n t c, gia t c và đ rungươ ậ ố ố ộ
Đo l ng không đi nườ ệ
Tra
ng
3
G i Tọn là th i gian đ m xung, Nờ ế 0 là s xung trong m t vòng (đ ố ộ ộ
phân gi i c a b c m bi n t c đ , ph thu c vào s l ), N là s ả ủ ộ ả ế ố ộ ụ ộ ố ỗ ố
xung trong th i gian Tờn.
n (vòng/giây) =
no
TN
N
4
60
D Clr Q
Q\
C
D Clr Q
Q\
C
QT
QN
A
B
QT
QN
QN
QT
Tra
ng
4
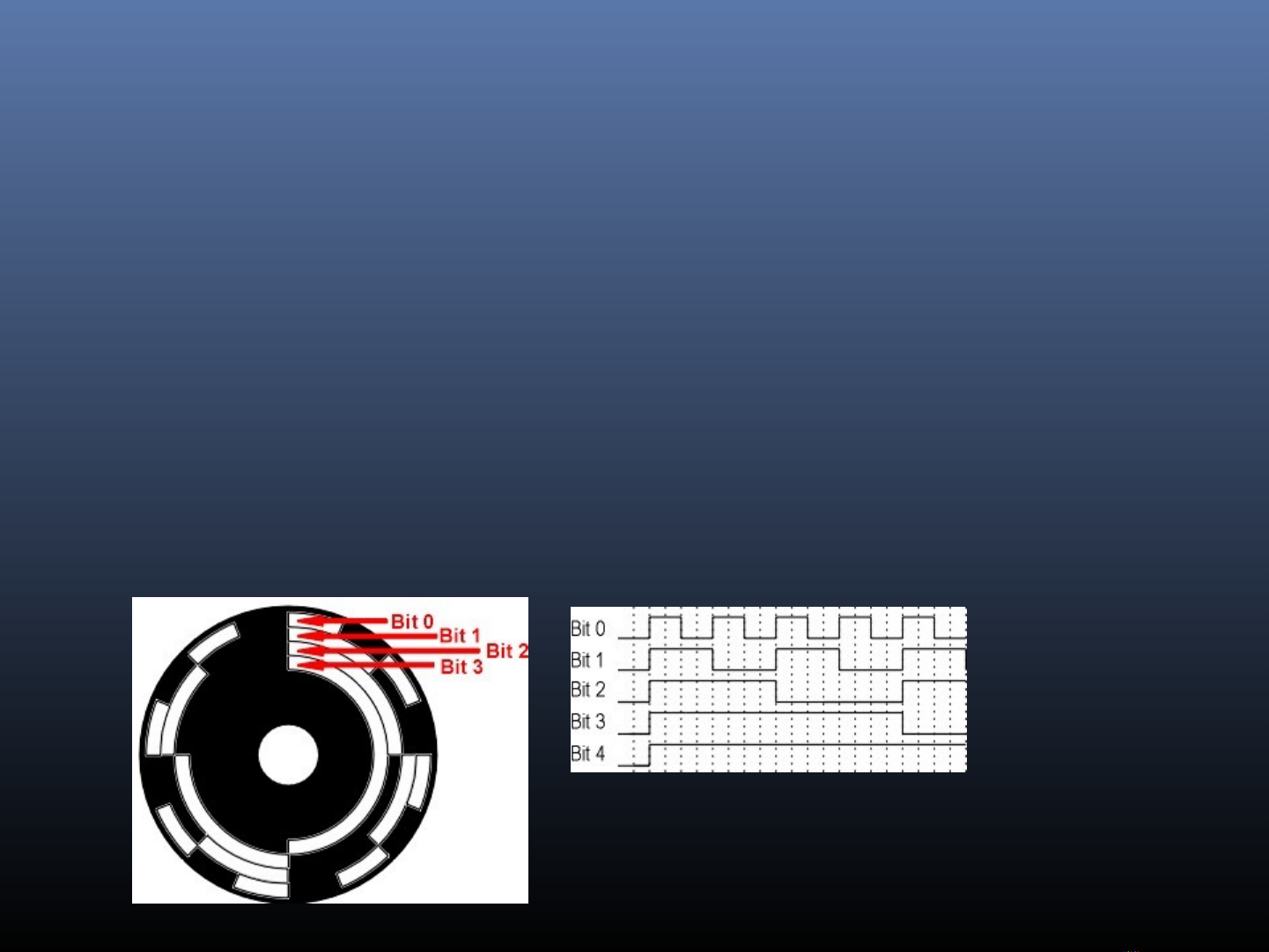
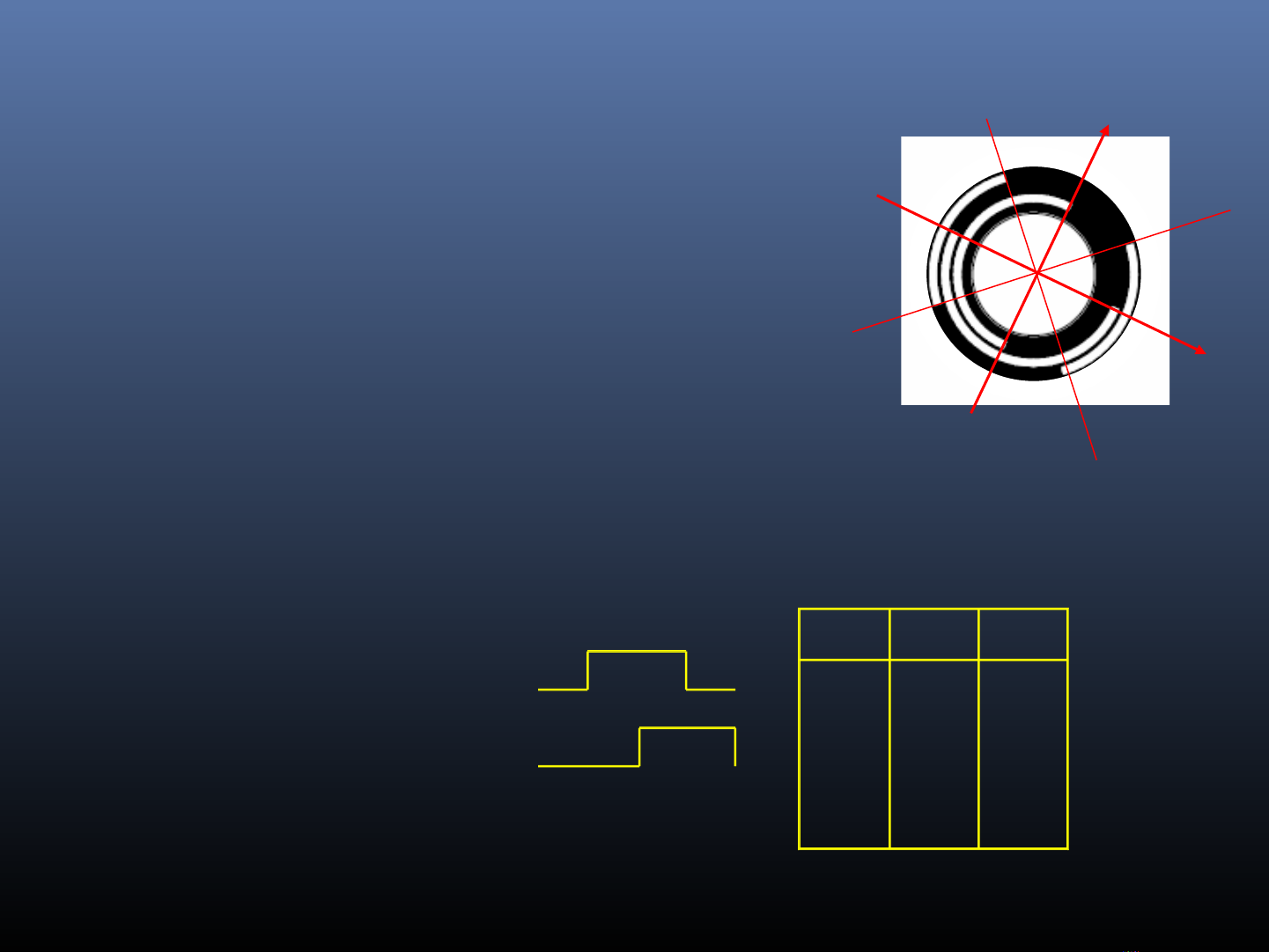
1.1.2 Đĩa mã hóa tuy t đ i (absolute encoder):ệ ố
Đĩa mã hóa tuy t đ i đ c thi t k đ kh c ph c đi u đó, luôn ệ ố ượ ế ế ể ắ ụ ề
xác đ nh v trí v t m t cách chính xácị ị ậ ộ
Đĩa Encder tuy t đ i s d ng nhi u vòng phân đo n theo hình ệ ố ử ụ ề ạ
đ ng tâm.ồ
- Vòng trong cùng xác đ nh đĩa quay đang n m n a vòng tròn nàoị ằ ở ử
- K t h p vòng trong cùng v i vòng ti p theo s xác đ nh đĩa quay ế ợ ớ ế ẽ ị
đang n m ¼ vòng tròn nào…ằ ở
Tra
ng
5
Ví d : Đo t c đ tuy t đ i 3 rãnh.ụ ố ộ ệ ố
Rãnh trong cùng xác đ nh roto đang quay ị ở
n a vòng tròn nào.ử
Rãnh trong cùng k t h p v i rãnh th 2 xác ế ợ ớ ứ
đ nh roto đang quay ¼ vòng tròn nào.ị ở
K t h p 3 rãnh s bi t đ c roto đang quay ế ợ ẽ ế ượ
góc 1/8 nào.ở
Đ đ m đo v trí cũng nh v n t c s d ng đo t c đ tuy t ể ế ị ư ậ ố ử ụ ố ộ ệ
đ i, ng i ta dùng b ng mã Gray.ố ườ ả
Ví d Gray 2 bit:ụ
0 1 23
Dec Bit 1 Bit 0
0
1
2
3
0
0
1
1
0
1
1
0
Bit 0
Bit 1
![Bài giảng Kỹ thuật đo [năm] chuẩn nhất](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250515/hoatrongguong02/135x160/941747305019.jpg)















![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)

