Đo lường - cảm biến
Cảm biến vận tốc, gia tốc và độ rung

Giới thiệu
•Máy phát tốc
•Encoder
•Gia tốc kế áp điện
•Đo độ rung động
Đo lường – Cảm biến
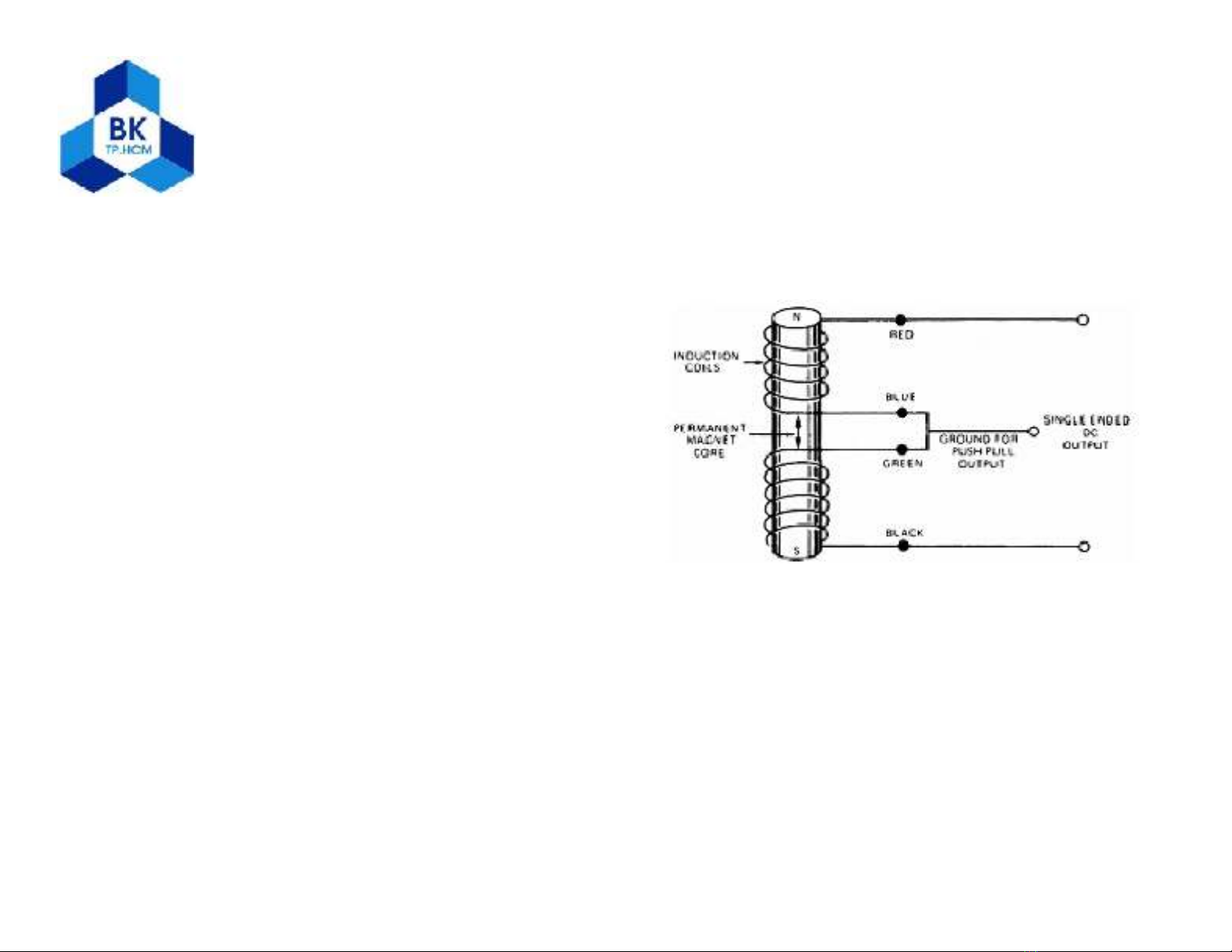
Cảm biến vận tốc điện từ
Đo lường – Cảm biến
Nguyên lý hoạt động của cảm
biến điện từ đo vận tốc
Điện áp ra tỉ lệ trực tiếp với vận
tốc của thanh nam châm vĩnh
cửu (theo nguyên lý cảm ứng
điện từ)
Gần tương tự như cảm biến vi sai
LVDT, nhưng là loại cảm biến thụ
động

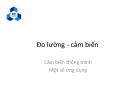
Máy phát tốc - Tachometer
•Dùng để đo vận tốc quay, ví dụ đo vận tốc của rotor
máy điện
•Phân loại: máy phát tốc tiếp xúc và không tiếp xúc
•Nguyên lý hoạt động:
- Máy phát tốc tính tốc độ bằng việc đo thời thời gian
giữa các xung nhận được
- Máy phát tốc tính tốc độ bằng việc đo tần số của các
xung nhận được
- Máy phát tốc có thể là một máy phát điện gắn đồng
trục với trục đối tượng quay, phát ra điện áp tỉ lệ thuận
với tốc độ quay
Đo lường – Cảm biến
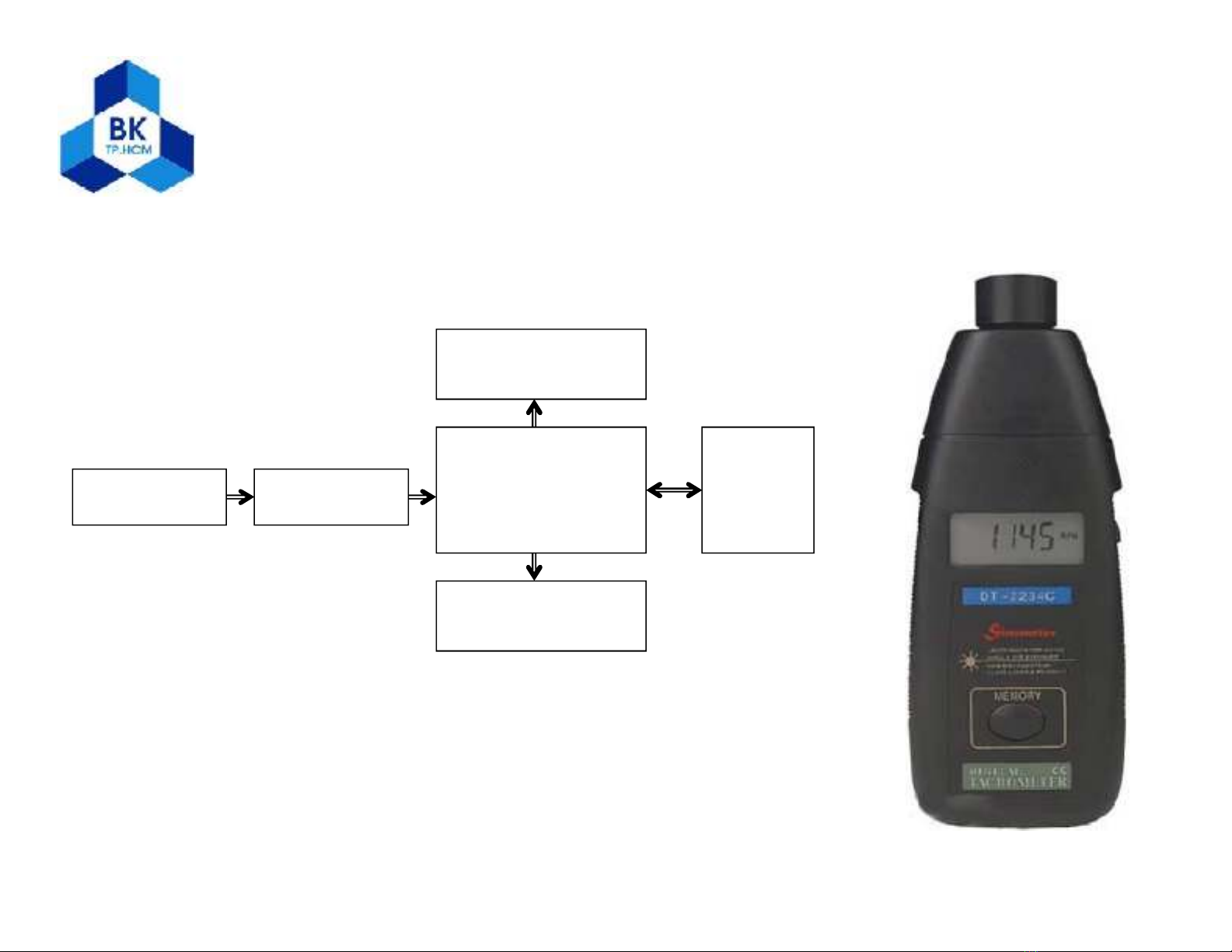
Tachometer
•Sơ đồ khối của máy phát tốc số
Đo lường – Cảm biến 5
Optical /
Magnetic Sensor
Signal
Conditioning
Microcontroller
Memory
Display
External
Port (to
controller)










![Bộ câu hỏi lý thuyết Vật lý đại cương 2 [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251003/kimphuong1001/135x160/74511759476041.jpg)
![Bài giảng Vật lý đại cương Chương 4 Học viện Kỹ thuật mật mã [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250925/kimphuong1001/135x160/46461758790667.jpg)