HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.01
13.01
13. C
13. CƠ C
Ơ CẤ
ẤẤ
Ấ
Ấ
ẤẤ
ẤU Đ
U ĐẶ
ẶẶ
Ặ
Ặ
ẶẶ
ẶC BI
C BIỆ
ỆỆ
Ệ
Ệ
ỆỆ
ỆT
T
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.02
13.02
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
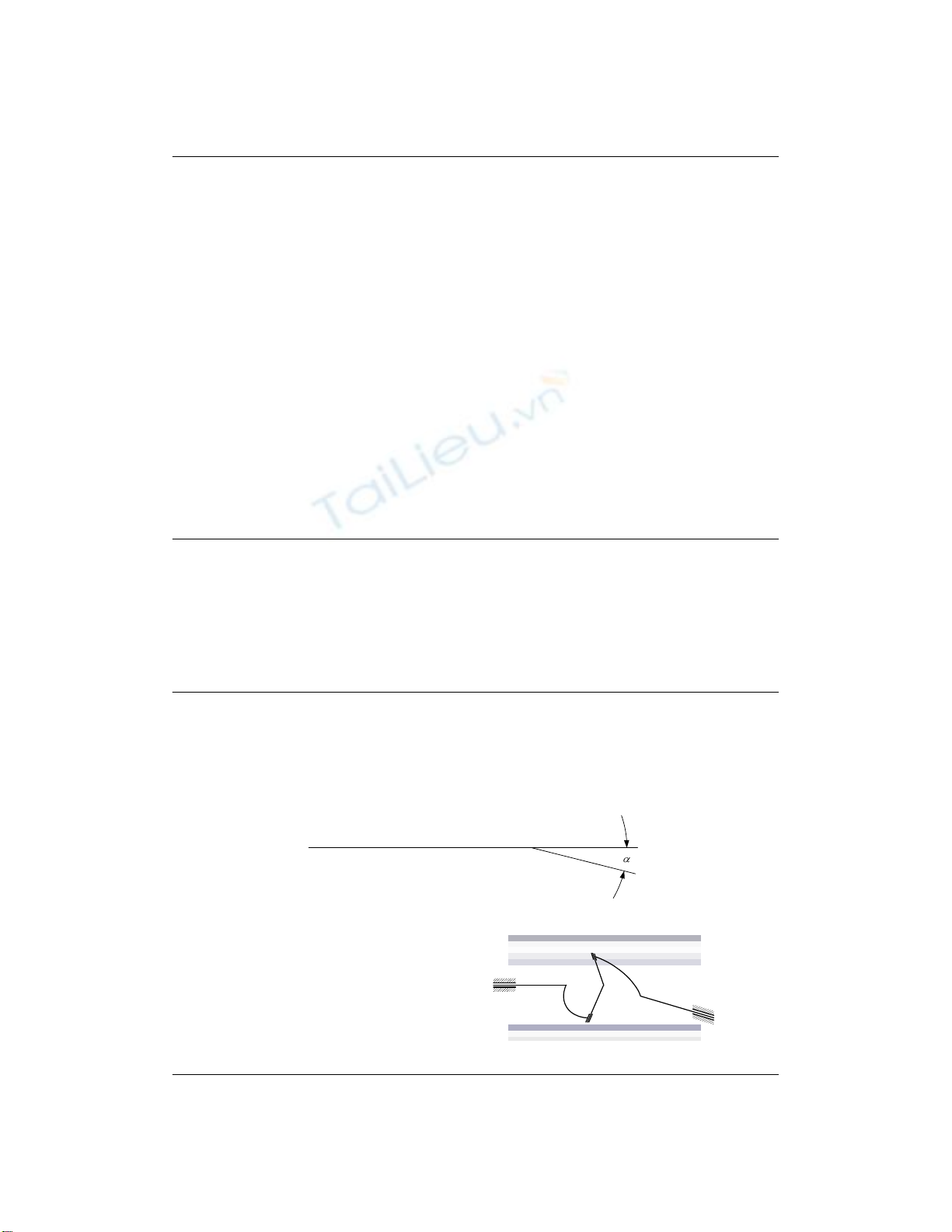
I.
I. Nguyên
Nguyên lý
lý c
cấ
ấu
ut
tạ
ạo
o
-
-D
Dù
ùng
ng truy
truyề
ền
nchuy
chuyể
ển
nđ
độ
ộng
ng gi
giữ
ữa
ahai
hai tr
trụ
ục
cgiao
giao nhau
nhau m
mộ
ột
tg
gó
óc
c
α
α
kh
khô
ông
ng l
lớ
ớn l
n lắ
ắm
m
-
-G
Gó
óc
c
α
α
c
có
óth
thể
ểthay
thay đ
đổ
ổi
i ngay
ngay trong
trong qu
quá
átr
trì
ình
nh chuy
chuyể
ển
n đ
độ
ộng
ng
α
1
ϕ
β
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.03
13.03
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
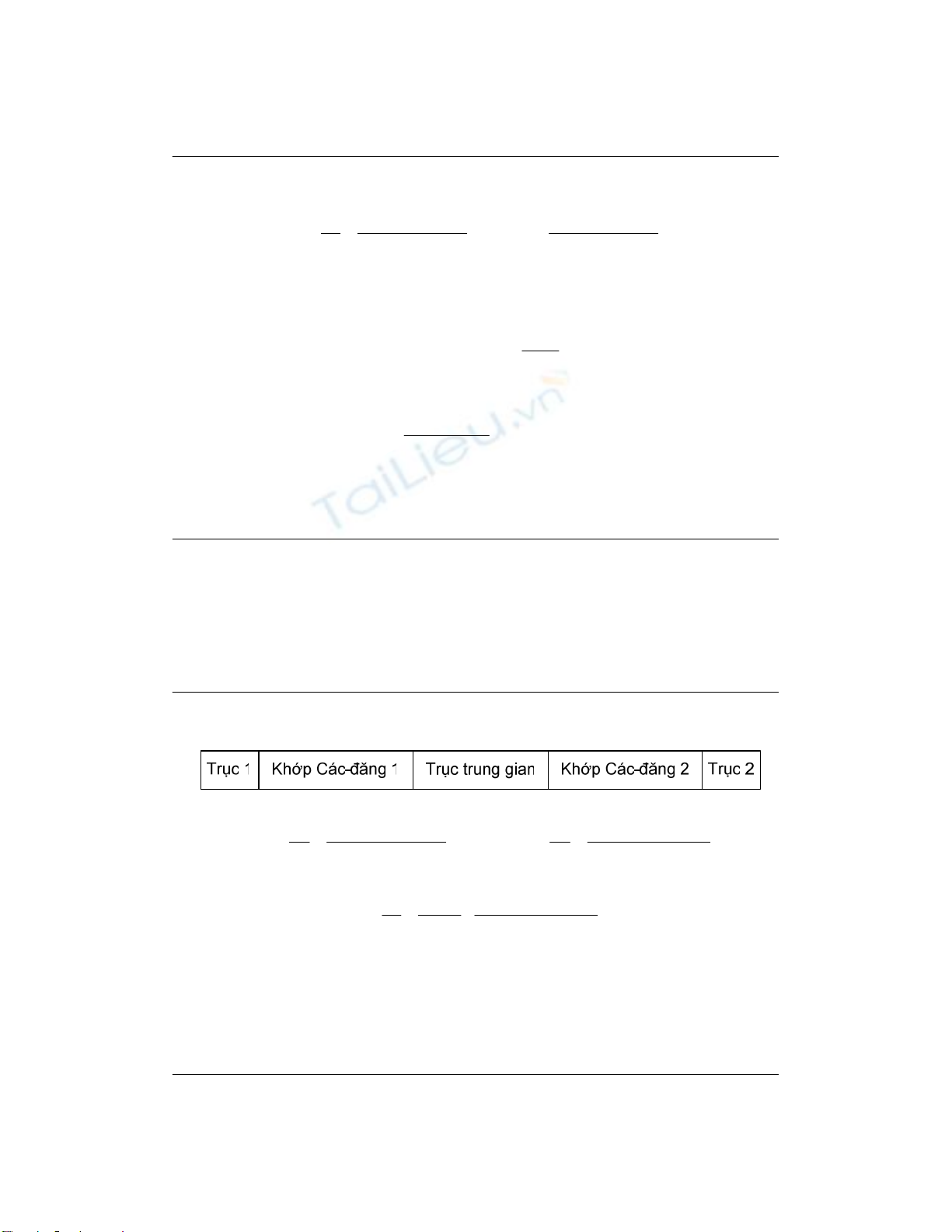
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
OA
OH
=
1
cos
ϕ
OH
OI
=− )cos(
2
α
π
OA
OI
=
β
cos
1
cossincos
ϕαβ
===⇒
OA
OH
OH
OI
OA
OI
O
A
I
H
O
A
I
H
α
π
−
2
O
A
I
H
α
1
ϕ
β
O
2
O
1
O
A
B
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.04
13.04
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
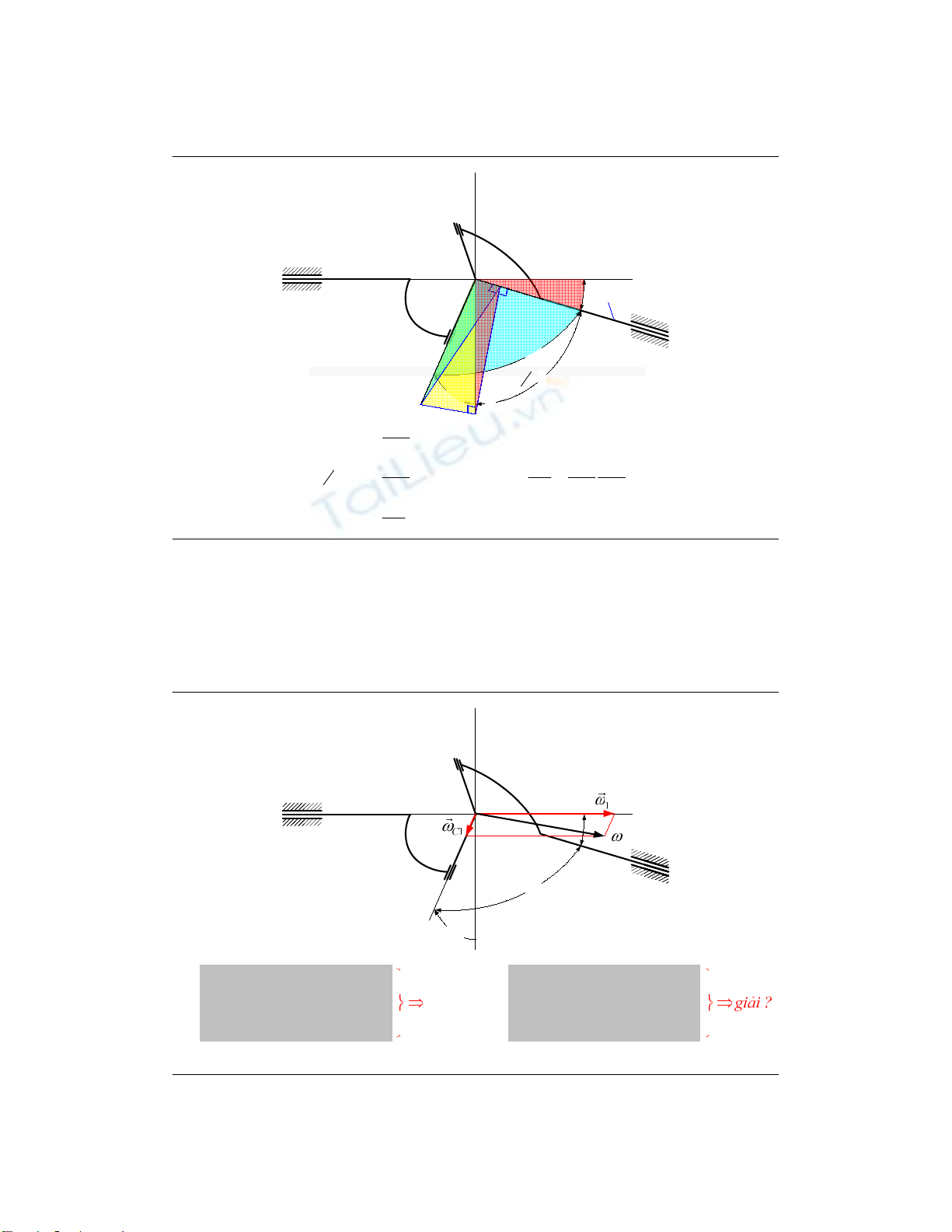
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
?||?
////?
1
1
11
ω
ω
ω
ω
r
r
r
r
OAOO
CC
+
=
???
////? 2
22
OBOO
CC
ω
ω
ω
r
r
r
+
=
giải được ?
α
1
ϕ
β
O
2
O
1
O
A
B
α
1
ϕ
β
O
2
O
1
O
A
B

HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.05
13.05
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
?||?
//////
1
1
11
ω
ω
ω
ω
r
r
r
r
OAOOxx
CC
+
=
??||
//////
2
22
C
CC
OBOOxx
ω
ω
ω
ω
r
r
r
r
+
=
),(),(}{ 11 OAOOOAOOxx I
=
⇒
α
1
ϕ
β
O
2
O
1
O
A
B
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.06
13.06
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
α
1
ϕ
β
O
2
O
1
O
A
B
α
ϕα
ω
ω
cos
cossin1 1
22
2
1
12
−
=≡i
1
cossincos
ϕ
α
β
=
)( 2211
2CC
ch
ω
ω
ω
ω
ω
r
r
r
r
r
+
=
+
)( 2211
1CC
C
ch
ω
ω
ω
ω
ω
r
r
r
r
r
+
=
+
β
ω
ω
cos
21
=
C
:
211
coscos
ω
β
ω
α
ω
=
+
C
:
m
mặ
ặt
tkh
khá
ác
c
do
do đ
đó
ó
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.07
13.07
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
III.
III. H
Hệ
ệs
số
ốdao
dao đ
độ
ộng
ng
α
ϕα
ω
ω
cos
cossin1
1
22
2
1
12
−
=≡i
1
1
22
2
cossin1
cos
ω
ϕα
α
ω
−
=⇒
α
ω
ωω
ϕ
cos
|
1
270,90
2max2
00
1
==
=
α
ω
ω
ω
ϕ
cos|
1
180,0
2min2
00
1
=
=
=
-
-Khi
Khi v
vậ
ận
nt
tố
ốc
cg
gó
óc
cthay
thay đ
đổ
ổi
itu
tuầ
ần
nho
hoà
àn
ntheo
theo g
gó
óc
cquay
quay
constconst
=
=
1
,
ω
α
2
ω
1
ϕ
-
-D
Dù
ùng
ng h
hệ
ệs
số
ốdao
dao đ
độ
ộng
ng đ
để
ểđ
đá
ánh
nh gi
giá
ám
mứ
ức
cdao
dao đ
độ
ộng
ng c
củ
ủa
av
vậ
ận
nt
tố
ốc
cg
gó
óc
c
αα
ω
ω
ω
δ
sintan
1
min2max2
2
=
−
≡
-
-G
Gó
óc
cc
cà
àng
ng l
lớ
ớn
n,
, dao
dao đ
độ
ộng
ng xo
xoắ
ắn
nc
cà
àng
ng l
lớ
ớn
n
α
→
→d
dù
ùng
ng kh
khớ
ớp
pc
cá
ác
c-
-đăng
đăng k
ké
ép
p
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.08
13.08
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
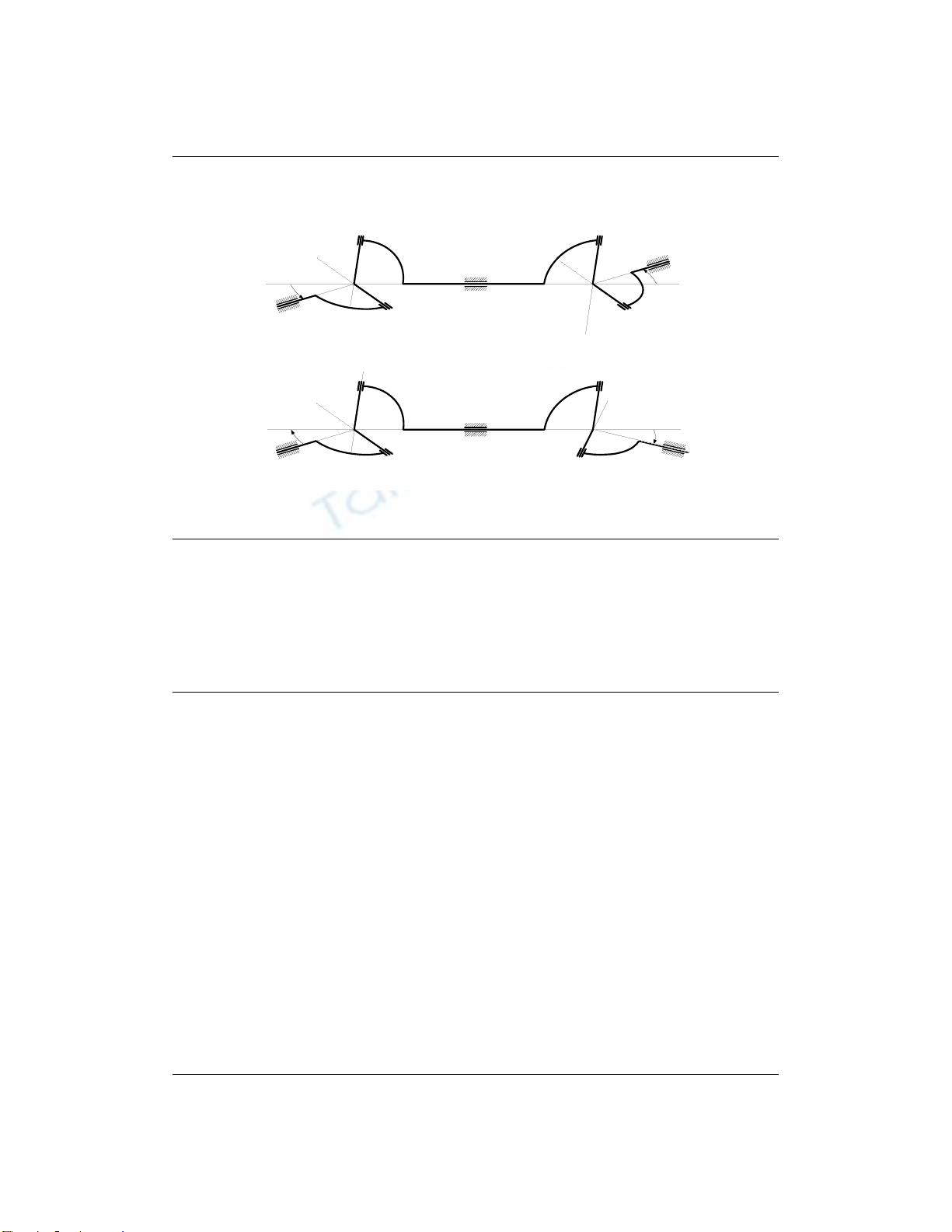
IV.
IV. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng k
ké
ép
p
1
1
2
1
2
1
1
cos
cossin1
α
ϕα
ω
ω
TT
T
i
−
==
2
2
2
2
2
2
2
cos
cossin1
α
ϕα
ω
ω
TT
T
i
−
==
1
2
1
2
2
2
2
2
2
1
2
1
12
cossin1
cossin1
cos
cos
T
T
i
ϕα
ϕα
α
α
ω
ω
−
−
×==
=
=
⇒=
21
21
12
TT
consti
ϕϕ
αα
444444 3444444 21 444444 3444444 21
444444 3444444 21
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.09
13.09
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
IV.
IV. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng k
ké
ép
p
α
α
α
α
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 13.10
13.10
§
§1.
1. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng (Universal Joint)
(Universal Joint)
IV.
IV. Kh
Khớ
ớp
pC
Cá
ác
c-
-đăng
đăng k
ké
ép
p















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)