Chương 1: GIỚI THIỆU CHUNG
1.1 Những khái niệm cơ bản
Yêu cầu:
1. Hiểu và phân biệt được các khái niệm
+ Cơ khí hoá quá trình sản xuất
+ Tự động hoá quá trình sản xuât
+ Tự động hoá từng phần
+ Tự động hoá hoàn toàn
+ Máy tự động
2. Phân tích được ưu nhược điểm của việc ứng dụng các thiết bị tự động trong sản xuất
3. Lý giải được nguyên nhân tăng năng suất lao động khi tự động hoá quá trình sản xuất
4. Ý nghĩa xã hội của, ưu điểm của tự động hoá sản xuất.
1.2 Đặc tính cơ bản của quá trình sản xuât
Yêu cầu:
Hiểu được khái niệm và ý nghĩa của các đặc tính cơ bản của quá trình sản xuất, bao gồm
- Chủng loại và số lượng sản phẩm
- Chất lượng sản phẩm
- Năng suất lao động
- Tính linh hoạt
- Mức độ tự động hoá
- Hiệu quả của quá trình sản xuất.
1.3 Mối quan hệ giữa kích thước, thời gian và thông tin trong sản xuất tích hợp
Yêu cầu:
1. Biết các yêu cầu để tổ chức và điều khiển được các dòng lưu thông trong sản xuất
2. Lý giải được tại sao kích thước, thời gian và thông tin lại liên quan với nhau

Chương 2: CÁC HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
2.1 Khái niệm về các hệ thống điều khiển tự động
Yêu cầu: Hiểu được các khái niệm:
- Hệ thống điều khiển tự động
- Máy tự động, máy vạn năng
- Hệ thống điều khiển
- Các chức năng chung của hệ thống điều khiển tự động
2.2 Phân loại các hệ thống điều khiển tự động
- Hệ thống điều khiển chương trình không theo số
+ Hệ thống điều khiển hành trình
+ Hệ thống điều khiển bằng Cam
+ Hệ thống điều khiển bằng dưỡng chép hình
- Hệ thống điều khiển chương trình theo số
+ Hệ thống điều khiển NC
+ Hệ thống điều khiển CNC
+ Hệ thống điều khiển thích nghi
Chương 3: CƠ CẤU TIẾP LIỆU
3.1 Những khái niệm cơ bản
Yêu cầu: Nắm được các nội dung sau:
1. Khái niệm cơ cấu tiếp liệu cho máy?
2. Những yêu cầu chủ yếu đối với cơ cấu tiếp liệu phôi dời
3. Phân loại được phôi rời từng chiếc theo mức độ tự động hoá
Bao gồm:
+ Nhóm 1: Phôi có khả năng định hướng tự động
+ Nhóm 2:Các loai phôi định hướng bằng tay
+ Nhóm 3: Các phôi có kích thước rất lớn
4. Cấu trúc chung của các cơ cấu tiếp liệu
Bao gồm: + Cơ cấu vận chuyển
+ Cơ cấu định hướng phôi
+ Cơ cấu cấp phôi
+ Các cơ cấu khác được lắp trên máy
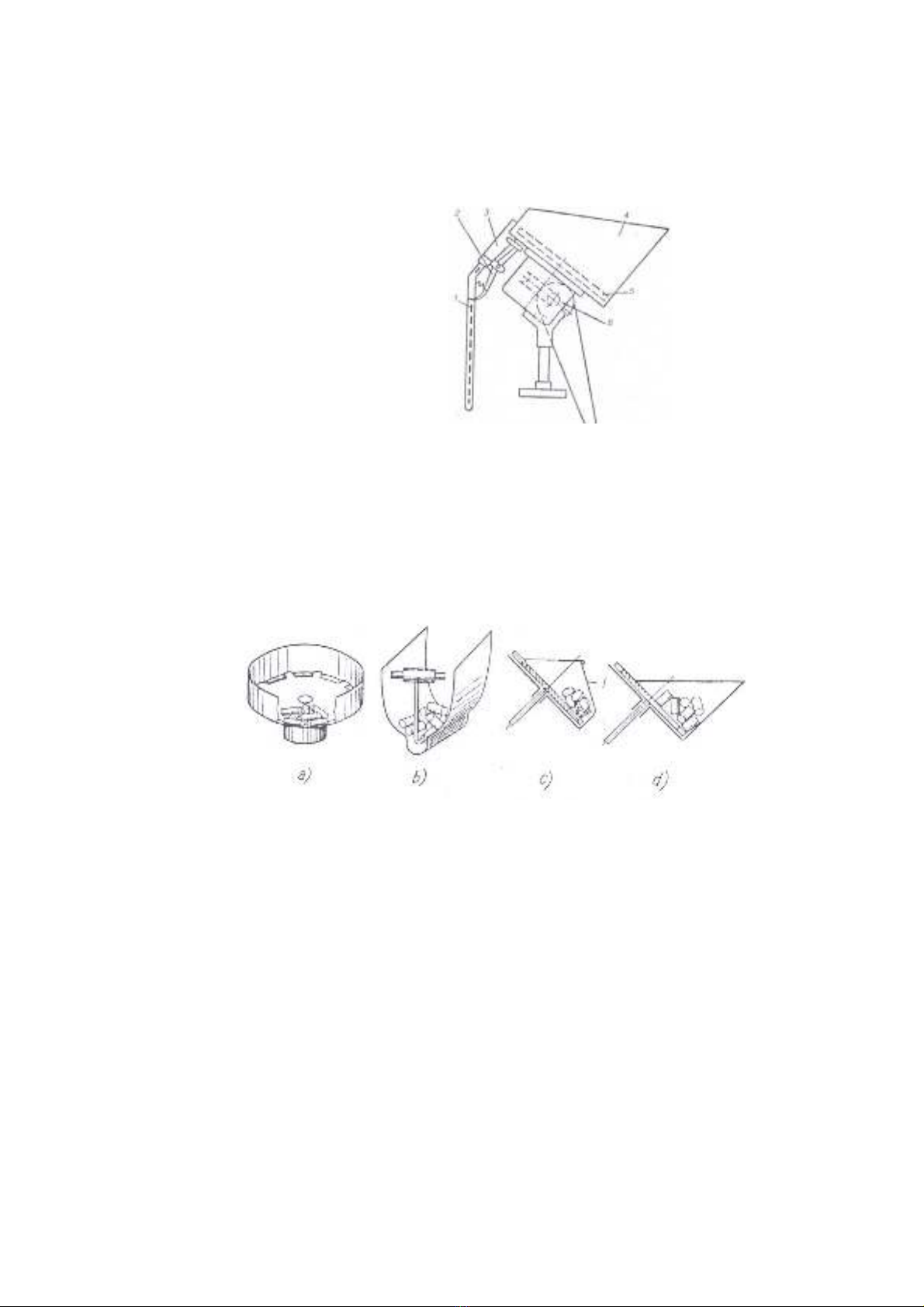
3.2 Cơ cấu định hướng phôi dạng phễu
Yêu cầu:
1. Hình dung được cấu trúc chung của cơ cấu định hướng phôi dạng phễu
1. Máng
2. Cơ cấu gạt phôi thừa
3. Cơ cấu định hướng phôi
4. Phễu
5. Tay tóm dạng đĩa
6. Bộ truyền động
Hình 3.1 Cơ cấp định hướng phôi dạng phễu
2. Hiểu được vai trò của hình dạng phễu trong định hướng phôi
Định hướng bên trong phễu của phôi chịu ảnh hưởng của tỷ lệ giữa chiều dài l và
đường kính phôi; vị trí của tâm độ cứng vững; số lượng phôi trong phễu và hình dạng của
phần đáy phễu.
Hình 3.2 Các hình dạng của phễu có khả năng định hướng phôi
3. Một số biện pháp phá vỡ chỗ vòm cuốn trong quá trình cấp phôi
Bao gồm:
+ Dùng thành sắt chọc bằng tay
+ Dùng các thanh đảo cơ khí
+ Rung phễu
+ Dùng bộ ngắt
+ Dùng cơ cấu rung động
+ Chọn hình dạng phễu

Hình 3.3 Các phương pháp phá vỡ chỗ vòm cuốn
4. Cơ cấu định hướng phôi
Quá trình định hướng phôi là cơ sở để thiết kế cơ cấu cấp phát tự động. Vì vậy lựa
chọn phương án thiết kế và chế tạo cơ cấu định hướng phôi là một trong những nhiệm vụ
quan trọng nhất của quá trình thiết kế chế tạo các cơ cấu cấp phôi tự động.
Dưới đây giới thiệu một số phương pháp định hướng phôi được dùng rộng rãi trong
sản xuất.
Hình 3.4 Định hướng phôi bằng cách lồng phôi vào móc vào chốt
1. Phôi
2. phễu
3. Chốt chứa
4. Ống dẫn
5. Móc
1. Móc
2. Phễu quay
3. Phôi
4. Bộ di
chuyển phôi
Hình 3.5 Cơ cấu định hướng phôi móc 1 bước
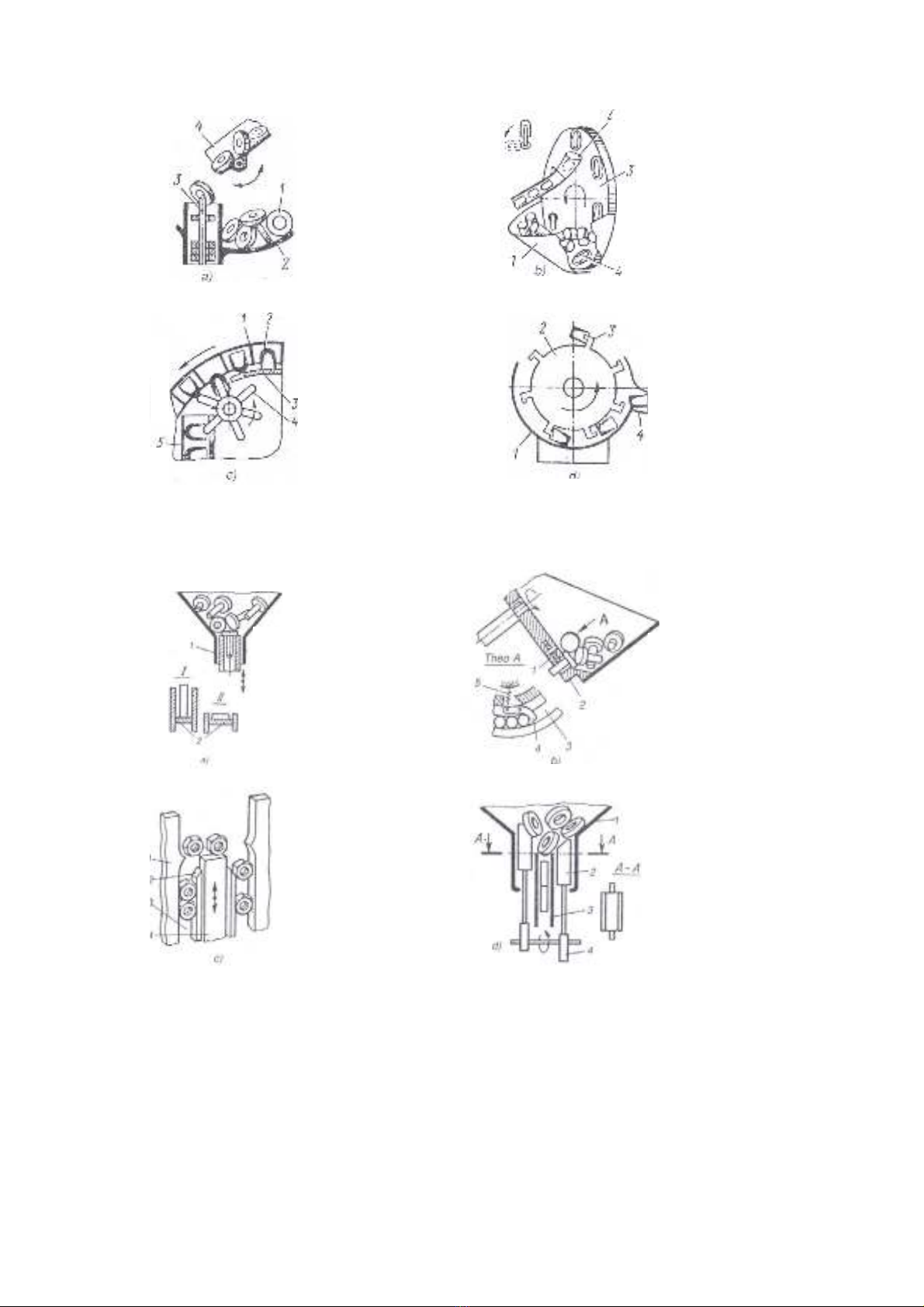
1. Phôi (vòng đệm)
2. Phễu
3. Chốt chứa
4. Xẻng dao động
1. Phễu
2. Máng chứa
3. Đĩa quay
4. Móc
2. Đĩa quay
3. Móc
4. Máng chứa
Dùng cho phôi nhỏ, có l ≥ d
1. Phễu
Dùng cho phôi nhỏ, có l ≥ d
1. Vòng quay
2. Hốc chứa
3. Tấm chắn
4. Chốt chuyển
5. Máng chứa
Hoạt động gây va đập, nên dễ hý hỏng Dùng cấp phôi dạng nắp
Hình 3.6 Các cơ cấu định hướng phôi hai bước
1. dải quạt
2. khe định hướng
1. đĩa quay
2. đáy phễu
3. rãnh
4. tay gạt
5. lò xo
Dùng để định hướng vòng đệm, bulông..
Dùng để định hướng đai ốc
1. Thành phễu
2. Thành dẫn đường
3. Máng chứa
4. Thanh đảo phôi
1. Phễu
2. Thanh đảo phôi
3. Máng
4. Cam
Dùng để định hướng vòng đệm
Hình 3.7 Định hướng phôi bằng rãnh