Chương 4- Control Techniques Drives and Controls Handbook -Page 103->120
HTTP://DT05.NET – Dientau05@yahoo.com – Dientau05@gmail.com
1
DCH TÀI LIU TRUYN ðNG ðIN
(Chương 4)
Translator:
1. Nguyn Văn Hng (Page 103-108)
2. Mai Trung Kiên (Page 109-114)
3.Nguyn Văn Năm (Page 115-120)
Lp:
DT05
Edit and Convert :
Nguyn Hoàng Sơn
Nguyn Vũ Hip
May 12, 2008
Chương 4
ðiu khin truyn ñng
1 Tng quan
2 A.C.MOTOR ðiu khin truyn ñng
3 D.C.MOTOR ðiu khin truyn ñng
4 S Phân tích (Ca) Và thit lp (ca) Mt s ñiu khin tc ñ
Chương 4- Control Techniques Drives and Controls Handbook -Page 103->120
HTTP://DT05.NET – Dientau05@yahoo.com – Dientau05@gmail.com
2
1 Tng quan
H ñiu khin lý tưng
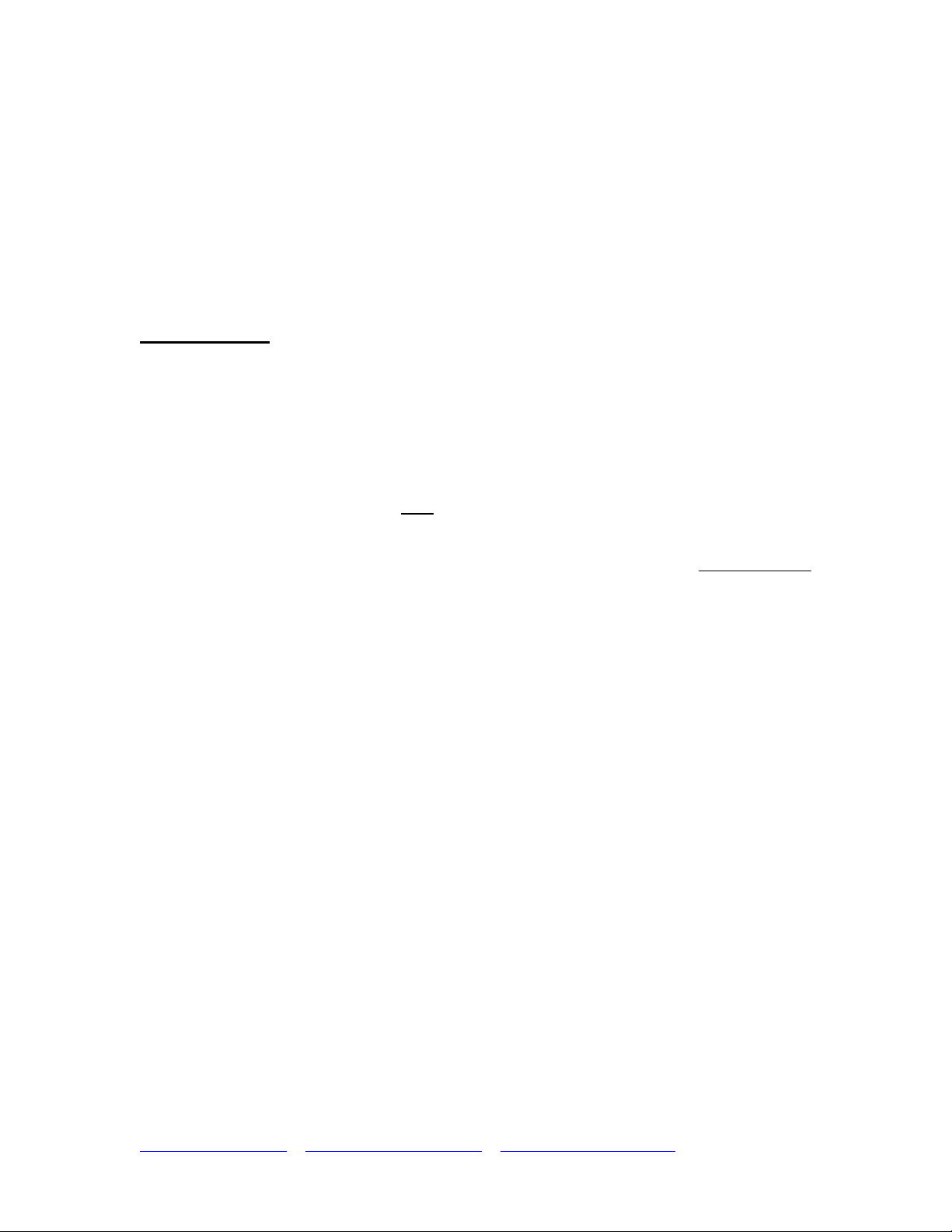
Nhiu ng dng tn ti nơi cái gì ñó phi kim soát ñi theo sau mt s lưng ñim
chun. Chng hn, tc ñ ca mt mô tơ ln có th ñưc thit lp t mt tín hiu bin
ñiu Ant thp. Cái này có th s dng mt bin- tc ñ ñưc ñưa vào ñiu khin như
Hình 4.1.
Lý tưng, mi quan h gia ñim chun và tc ñ mô tơ cn phi tuyn tính và h
ñiu khin cn phi phn hi ñ tc thi thay ñi trong ñim chun. Bt kỳ h thng ñiu
khin nào có th thì ñưc ñi din cho, như ñưc ñưa vào Hình 4.1 B, vi mt ñu vào
ñim chun báo hiu, trong hp mt tc ñ chun, mt hàm truyn G và mt ñu ra, trong
hp tc ñ quay ca trc mô tơ W. Cho h thng lý tưng, hàm truyn G là mt hng s
ñơn gin, vì th ñu ra kia cân ñi ñi vi ñim chun vi không có s trì hoãn.
ðiu chnh theo chu trình m
Hình 4.1 Bin ñiu khin tc ñ và mô tơ
Không may, hàm truyn ca nhiu h thng không là mt hng s và vì th,
không có bt kỳ m u dng nào ca s phn hi t ñu ra ñ sa cha cho bc không lý
tưng ca hàm truyn, ñu ra làm không phi vt tích cân ñi ñn ñiu khin báo hiu. S
dng mt ñng cơ cm ng ñưc cung cp bi mt vòng m ñơn gin bin tc ñ ñiu
khin như mt ví d, ñi theo sau mt s hiu ng không cn ñn mà có th xut hin
trong nhng h ñiu khin.
S ðiu chnh
ðu ra ca mt vòng m ñơn gin ñiu khin có th là mt tn s c ñ"nh, mà cân
ñi ñi vi tc ñ yêu cu báo hiu. Bi vy, tn s ng dng vào mô tơ không thay ñi,
vì mt tc ñ không ñi yêu cu. Tuy nhiên, Tc ñ ca mô tơ gim trong khi np thì ng
dng bi vì s trưt ñin hình ca mt ñng cơ cm ng, và vì th tc ñ không li ti
mc ñưc yêu cu.
S Bt n ñnh
ðó là nhng ñiu kin gánh ph ti; np dưi nht ñ"nh có th xy ra và ti
nhng tn s nht ñ"nh cho tc ñ mô tơ ñ dao ñng vòng quanh ñòi h#i ñi nhanh dù tn
s ng dng không thay ñi ñi na. Ngun chính khác ca s bt n ñ"nh trong s quay
cơ khí nhng h thng là s mt mát thp ñàn hi nhng s ghép ni và nhng tay cm.
Tính tuyn tính
Có nhiu ngun có th xy ra tính tuyn tính; phi chăng, chng hn, mô tơ ñưc
ni ti mt hp s tc ñ ti ñu ra ca hp s có th ñưc nh hưng bi s git lùi gia
nhng hp s.
Chương 4- Control Techniques Drives and Controls Handbook -Page 103->120
HTTP://DT05.NET – Dientau05@yahoo.com – Dientau05@gmail.com
3
Nhng s bin ñi vi nhit ñ
Mt s khía cnh ca hàm truyn h thng có th thay ñi vi nhit ñ, chng hn
s trưt ca mt ñng cơ cm ng tăng khi mô tơ làm nóng lên trên, và vì th mt s np
ñã cho tc ñ mô tơ có th gim bt t tc ñ b%t ñu khi mô tơ lnh.
S Trì hoãn
Vi mt b phn bin ñi ngh"ch ño vòng m ñơn gin và ñng cơ cm ng có
th là mt s trì hoãn trưc ñây tc ñ mô tơ ñt ñn mc ñưc yêu cu sau khi mt s
thay ñi trong yêu cu. Trong nhng ng dng rt ñơn gin, chng hn. kim soát tc ñ
ca mt dây chuyn l%p ráp, kiu này ca s trì hoãn này không phi là mt vn ñ.
Trong nhng h thng phc tp hơn, như nhng máy công c, nhng s trì hoãn có mt
hiu ng quan tr&ng trên cht lưng ca h thng.
ðây là mt s nhng hiu ng mà có th ñưc sn xut nu mt h thng ñiu
ch'nh theo chu trình m ñưc s dng. Mt phương pháp mà có th ñưc dùng ñ ci
thin cht lưng ca b ñiu khin s( s dng Mt bin pháp ca s lưng ñu ra áp dng
s phn hi nào ñó ñ ñưa cho chu trình kín ñiu khin.
ðiu khin chu trình kín
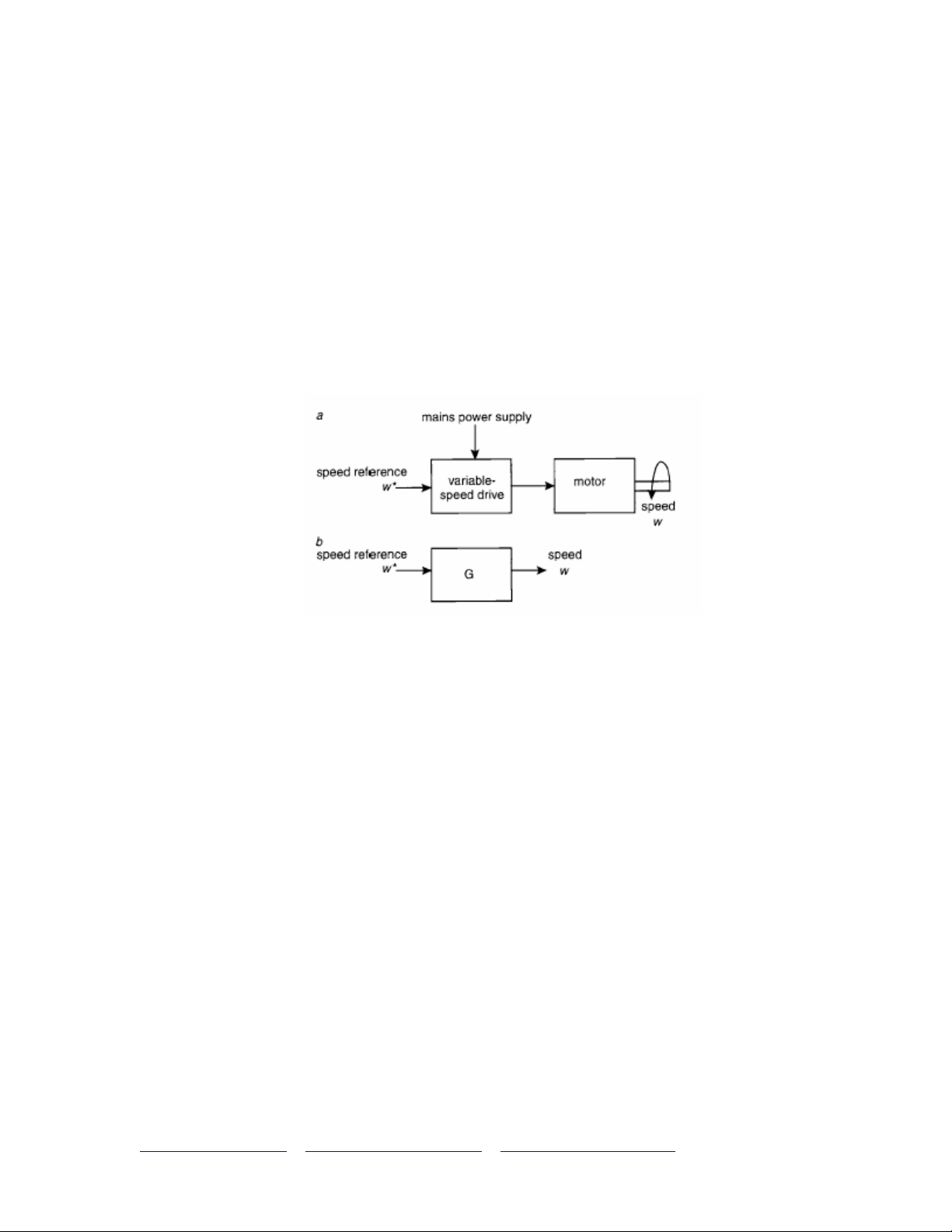
Hình 4.2 chu trình kín ñiu khin h thng
S truyn ñng vòng m ñơn gin ca mc khu vc trưc ñây ñưc thay th vi
mt h ñiu khin như Hình 4.2 ñưc ñưa vào. Tc ñ ca trc quay mô tơ ñưc ño và so
sánh vi s tham kho tc ñ ñ ñưa cho mt tc ñ l)i. L)i ñưc ñiu ch'nh bi mt
hàm truyn F ð cho mt s tham kho hin thi(i*) ti ñu vào ti khi ñiu khin hin
thi. Nhiu phương pháp ca ñiu khin hin thi cho nhng mô tơ ñưc bàn lun trong
khu vc k tip; tuy nhiên, bây gi nó cn phi ñưc gi thit rng mô tơ hin thi có th
kim soát cho mt lc xo%n mà cân ñi ti s tham kho hin thi. Nu tc ñ ca mô tơ
thay ñi t mc chun mt l)i tc ñ ñưc sn xut Và Lc xo%n sin ti s np ñưc sa
ñi ñ ñem li mc chun cho tc ñ.
ðó là ñ cn dùng ñ ch&n mt hàm truyn thích hp F ð ñang tn ti s thc
hin ñưc yêu cu t chu trình kín kim soát h thng. Chc năng ñã có th là mt li ích
ñơn gin, bi vy S tham kho hin thi i* =K
p
X
W
err
. Cái này ñưa cho ñ nào ñó ñiu
khin qua tc ñ ñu ra, nhưng l)i tc ñ phi có mt giá tr" khác không nu có lc xo%n
ñưc yêu cu gi tc ñ mô tơ. Nu l)i tc ñ không là ch s không, thì tc ñ không là
ti mc chun ñưc yêu cu, và vì th tc ñ thay ñi vi s np. Vic g%n thêm mt
thut ng nguyên vì vy s tham kho hin thi kia , ñó không
còn là ñ cn dùng ñ có bt kỳ l)i tc ñ nào thm chí khi lc xo%n ñòi h#i ñ ñiu
khin s np ti ñim chun ñi nhanh. Thut ng nguyên tích lũy bt kỳ l)i tc ñ nào
trong thi gian và ñ%p ni mt ñim chun hin thi ñ cung cp lc xo%n cn thit. Mt
h thng ñiu khin ñóng vòng vi thành phn ca t+ l và nhng thut ng nguyên ñưc
g&i là mt b ñiu khin PI. M,c dù có bt kỳ kiu nào ca b ñiu khin ñóng vòng, b
Chương 4- Control Techniques Drives and Controls Handbook -Page 103->120
HTTP://DT05.NET – Dientau05@yahoo.com – Dientau05@gmail.com
4
ñiu khin PI là thưng s dng nht bi vì nó ñơn gin ñi vi s thi hành, mt cách
tương ñi d- dàng ñi vi cài ñ,t và dòng dng bc thang ñưc hiu bi ña s thit k.
Tiêu chun ñ ñánh giá s Thc hin ca mt chu trình kín Kim soát H
thng
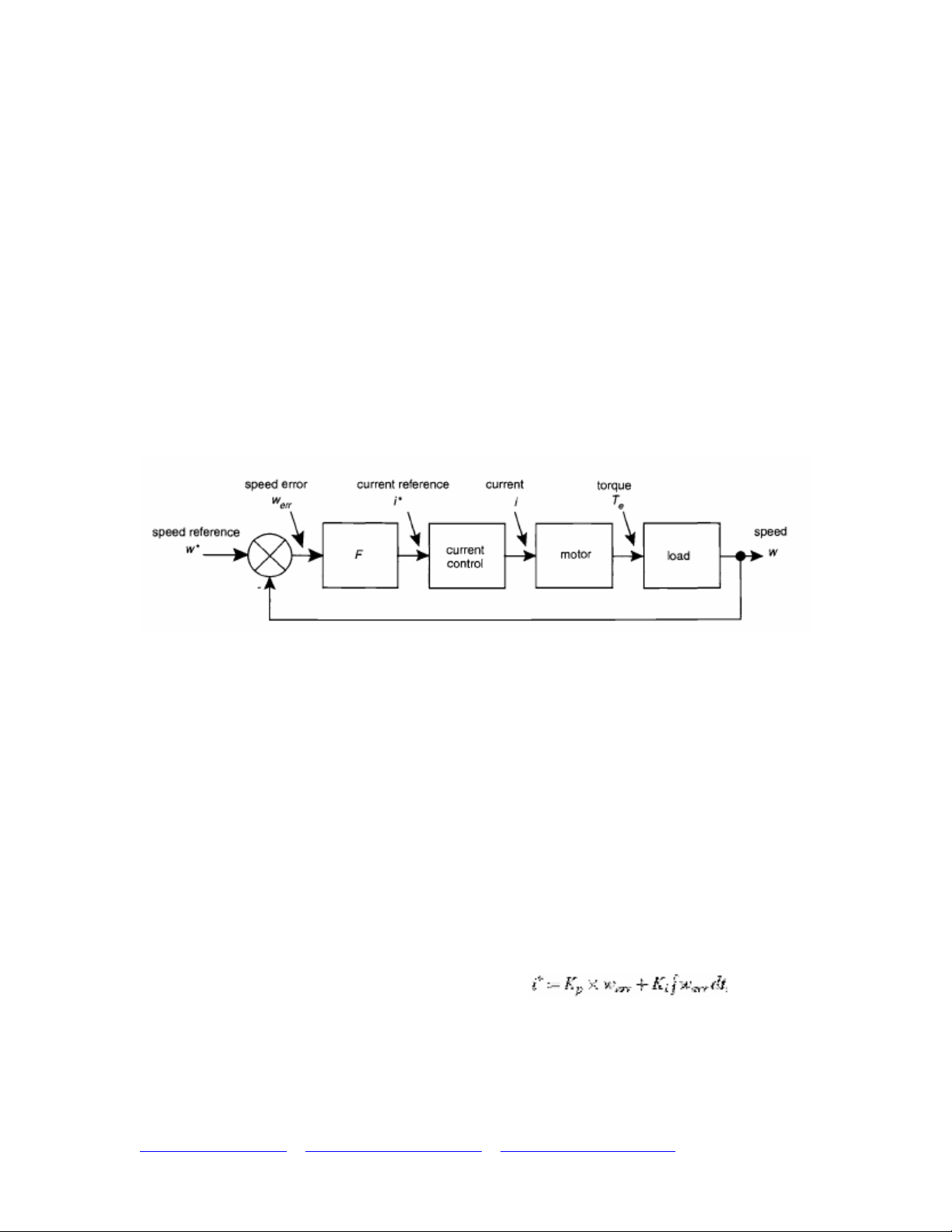
S ñáp li bưc là mt phương pháp ca vic ñánh giá kh năng ca mt h ñiu
khin chu trình kín ñ ñi theo sau mt s thay ñi bc trong ñim ñ,t. Mt s s ñáp li
bưc ví d ñưc ñưa vào Hình 4.3 cho mt h thng cp hai ñơn gin.
Nu ñu ra ñt ñn s tham kho vào thi gian có th xy ra ng%n nht không có
bt kỳ quá mc nào s ñáp li ñưc mô t khi hin thân mt cách nguy k"ch t%t dn.
Hình 4.3 nhng s ñáp li bưc
Nu quá mc không thì chp nhn ñưc, ri cái này ñi din cho s ñáp li có th xy ra
tt nht ñang ñưa cho s trì hoãn giá tr" nh# nht gia ñu vào và ñu ra ca h thng.
Nu s làm nht h thng thì ñang gia tăng s ñáp li tr nên chm hơn và ñưc mô t
khi hin thân qua t%t dn. Cách khác, nu h thng dưi ñưc gip ưt s ñáp li bao
gm quá mc nào ñó và có th dao ñng v s tham kho ñưc yêu cu trưc ñây ñang
n ñ"nh.
Nhng kt qu này, mà cho mt h thng cp hai ñơn gin, cho thy mà tăng s
làm nht gim bt quá mc và nhng c,p ñu thp xung s ñáp li h thng. Như s(
ñưc trình di-n trong Chương 4.4, nhng h thng thc s có th thì phc tp và ngày
càng tăng hơn s làm nht không phi thưng xuyên cho kt qu này.
S ñáp li bưc có th là s ñáp li chu trình kín ca h thng, ñâu mt s thay
ñi ti mc chun vào thi gian ti thiu ñưc yêu cu. Cách khác, s ñáp li bưc có th
theo s thay ñi ca ñu ra cho lc xo%n ñưc gi ra ti s kích thích khác nào ñó, như
mt s np. Trong trưng hp này s ñáp li cn phi thì càng nh# càng tt.
S ñáp li bưc có th ñưc s dng ñánh giá s thc hin b ñiu khin khi nó
ñưc s dng trong cô lp. Tuy nhiên, nu chính b ñiu khin s( ñưc bao gm bên
trong vòng ñiu khin ñưc ñóng ca h thng và s trì hoãn ca h thng nguyên bn
na li ích thì quan tr&ng như chúng nh hưng ñn s thc hin ca h thng phía
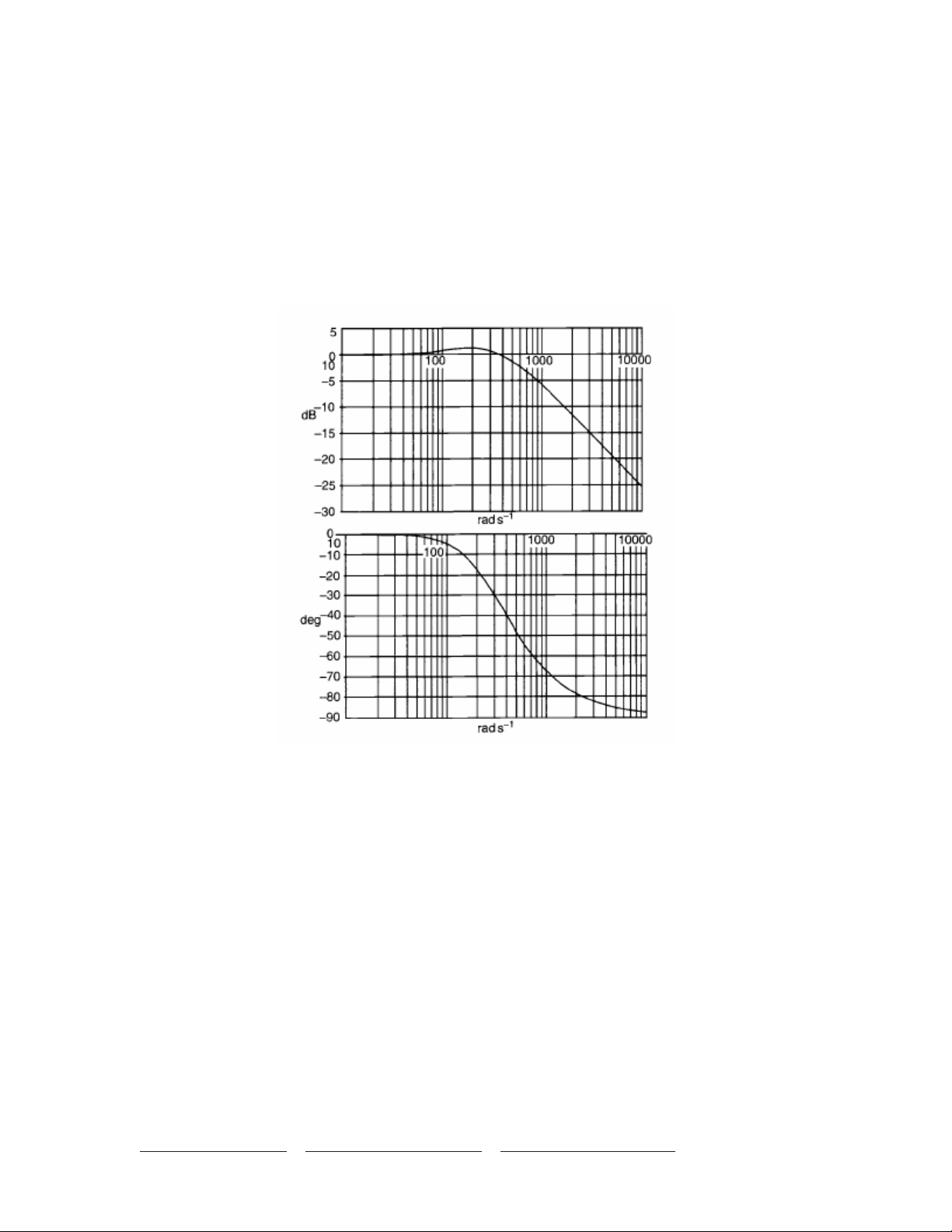
ngoài. Li ích và s trì hoãn có th ñưc ño bi sn xut mt ñ th" Bode cho thy rng
li ích và ñáp tuyn tn s như ñưa vào Hình 4.4.
Chương 4- Control Techniques Drives and Controls Handbook -Page 103->120
HTTP://DT05.NET – Dientau05@yahoo.com – Dientau05@gmail.com
5
Mt b ñiu khin lý tưng có li ích ñng nht và pha ch s không ti tt c các
tn s; tuy nhiên, trong mt h thng thc s như ñưc ñưa vào Hình4 .4 li ích gim bt
và thi gian truyn pha tăng ti nhng tn s cao hơn. Mt bin pháp ca nhng hiu ng
này là di thông
2. ðiu khin truyn ñng mô tơ A.C
Có nhiu kiu truyn ñng tc ñ bin tng cái th#a mãn ti nhng ng dng
khác nhau hay thao tác vi nhng kiu khác nhau ca mô tơ.
Trong khu vc này nhng s mô t ca h thng, mà thưng ñưc ñ"nh nghĩa như ñim-
3dB ñ,c trưng li ích. Trong ví d cái này xut hin ti 670 rad /s.
Hình 4.4 Biu ñ Bode li ích ca h thng và pha
K/ tương ng thi gian truyn pha thay ñi ñang ph thuc vào mnh lnh ca h
thng. Mt h thng mnh lnh ñu tiên có mt s trì hoãn 45° ti ñim- 3dB, trong khi
mà mt h thng cp hai như cái trong ví d có Mt s trì hoãn 60° Ti ñim- 3dB.
Nhng s trì hoãn chuyên tr ñưc liên quan ñn nhng h thng có th xa hơn na tăng
s trì hoãn ti ñim-3 dB. Trong nhiu trưng hp di thông ñưc báo giá tr" như mt ch'
ñ"nh s thc hin ñng ca mt h ñiu khin,i.e. bc cao di thông tt hơn ch' tiêu c h
thng. Di thông này là ch' ñ"nh thông thưng ñưc báo giá tr" trong khi tn s ch' ñ,c
trưng cho li ích ti ñim -3 dB, và ñ,c bit vi mt s thi hành s có th không có cht
lưng ca h ñiu khin chút nào. Nu b ñiu khin s( ñưc bao gm bên trong h ñiu
khin chu trình kín khác thi gian truyn pha thì quan tr&ng. Nu s trì hoãn quá ln có
th tht cn thit ñ mt ñiu hưng vòng phía ngoài ñ bo trì s vng vàng. S lưng
quá mc trong s ñáp li bưc thì thêm quan tr&ng trong nhiu ng dng. Vic tăng tn
s ca ñim-3 dB ñ,c trưng li ích có th d n ñn quá mc không th chp nhn. Xác
ñ"nh nhng h ñiu khin tiêu biu cho mt phm vi ca nhng kiu tc ñ bin khác
nhau ñiu khin vn hành vi nhng mô tơ A.C.
ðiu khin vòng m ña dng A.C.

![Truyền động điện: Chương 12 [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/gaugau1905/135x160/370589692.jpg)
![Truyền động điện: Chương 11 [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/gaugau1905/135x160/242078598.jpg)
![Truyền động điện: Chương 9 [Tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/gaugau1905/135x160/1518817545.jpg)
![Truyền động điện: Chương 6 [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/gaugau1905/135x160/1064960081.jpg)

![Truyền động điện Chương 2: [Thông tin chi tiết về nội dung chương]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/gaugau1905/135x160/1245913617.jpg)
![Truyền động điện: Chương 1 [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/gaugau1905/135x160/1955755336.jpg)


















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)