Chương IV: Khảo sát chất lượng hệ thống truyền động điện
57
CHƯƠNG IV
KHẢO SÁT CHẤT LƯỢNG HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN
4-1: Sơ đồ cấu trúc hệ thống.
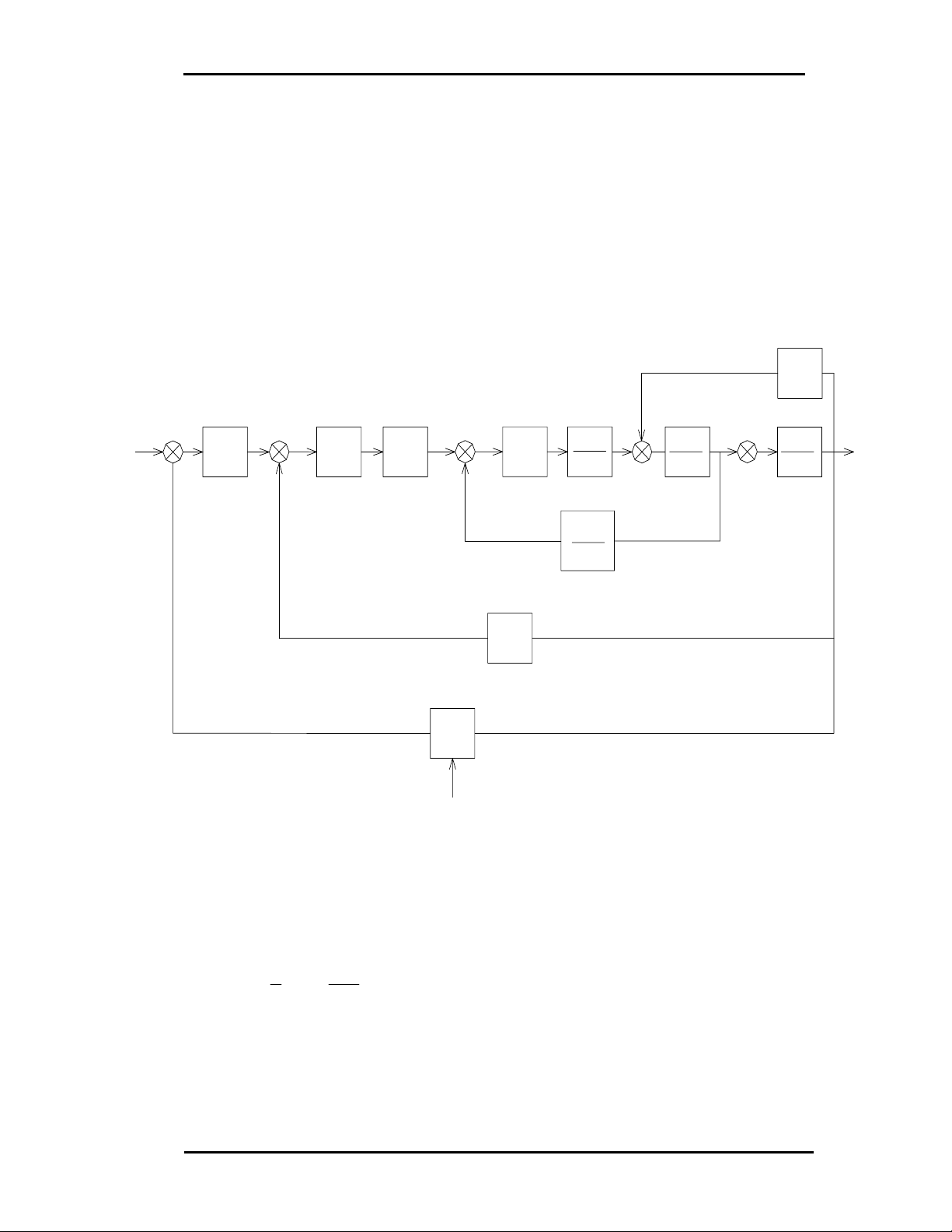
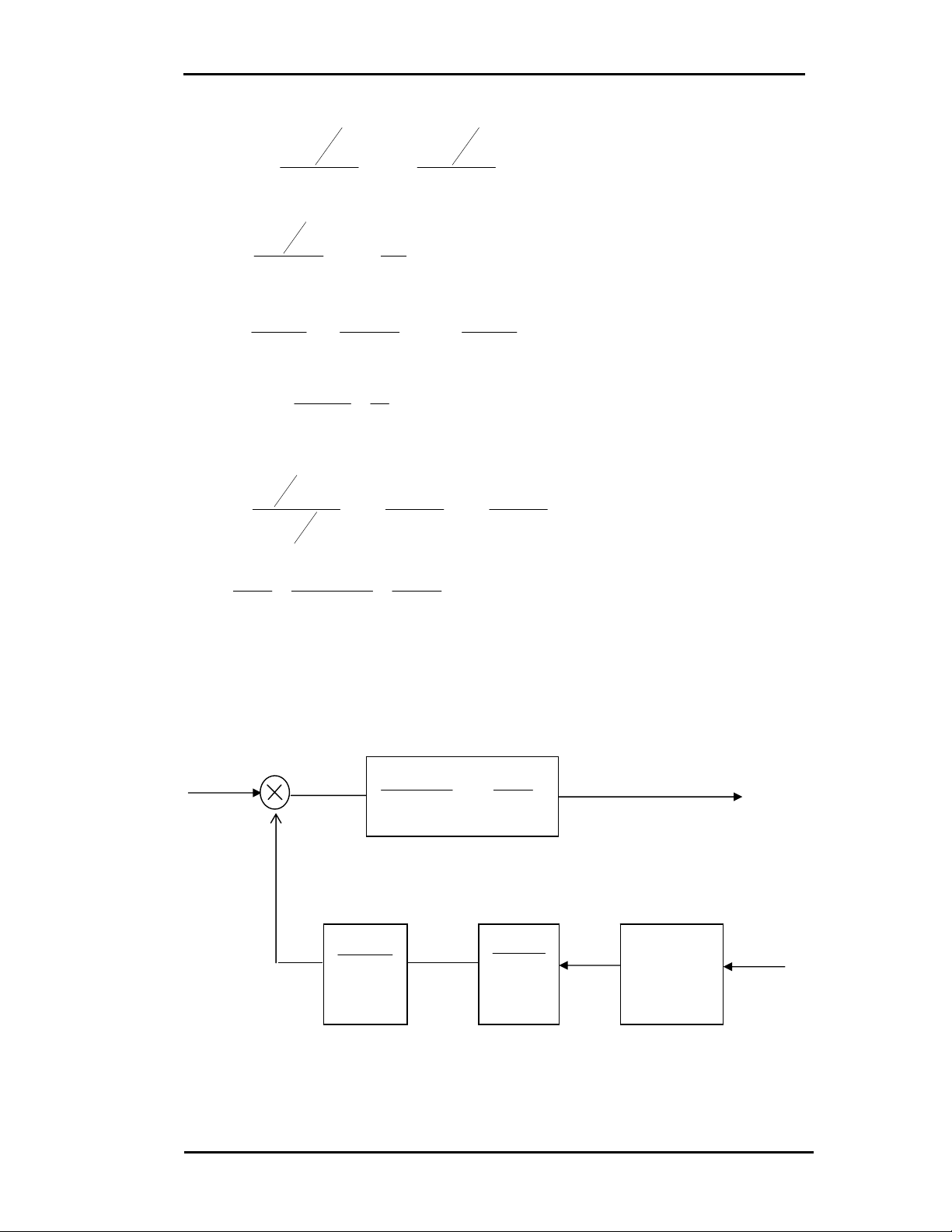
Từ sơ đồ nguyên lý ta xây dựng được sơ đồ cấu trúc của hệ thống có dạng
như hình vẽ (4-1)
Hình 4.1. Sơ đồ cấu trúc hệ thống điều khiển
4.2.Tính mô hình động cơ điện.
- Điện trở của phần ứng động cơ.
()
dm
dm
uI
U
R
η
−= 1
2
1
η: hiệu suất lấy η=0,85.
KQ
Q®
RQ
UfhQ
- -
Ufhω
K
φ
UfhI
Kω
R
ω
HC
-
RIKB§
TB§p+1
Ki
1+R10C8P
1/Ru
TB§p+1
K
φ
JP
m
-
Chương IV: Khảo sát chất lượng hệ thống truyền động điện
58
⇒
()
)(47,1
2,11
220
85,01
2
1
Ru Ω=−=
5,167
55,9
1600
55,9 === dm
dm
n
ω
215,1
5,167
47,1.2,11220
K=
−
=
φ
v/rad
*. Tính Tư.
u
u
uR
L
T=
- Lư: Điện cảm của mạch phần ứng động cơ.
Ta có:
dmpdm
udmL
unZI
UK
L..
.
=
Zp: số đo cực ....2.
K
L: hệ số (Máy có bù) KL = 1,9.
⇒H01160
16002211
220
91Lu,
..,
,==
- s
H
Ru
Lu
Tu 0078,0
)(47,1
)(0116,0 =
Ω
==
4.3. Tính độ biến đổi.
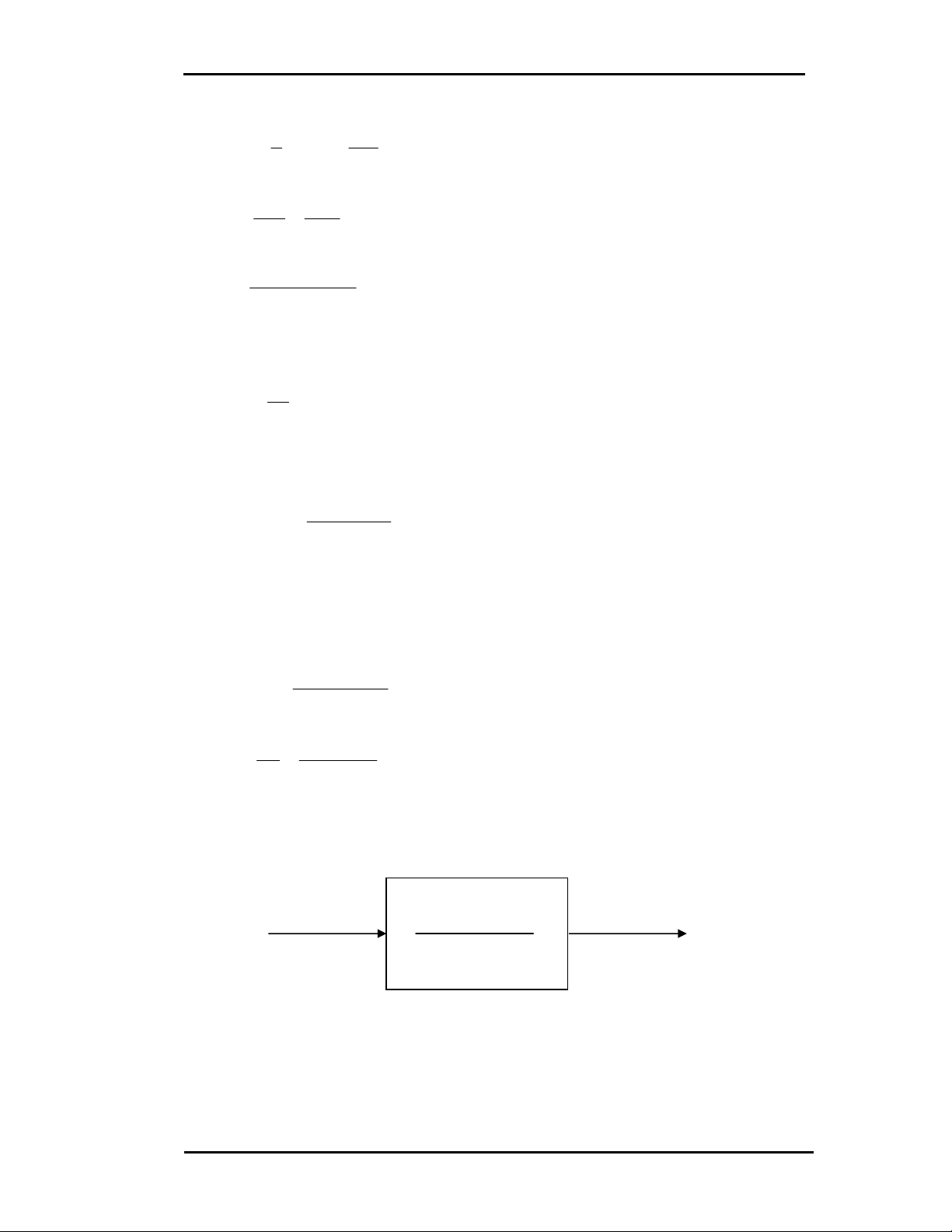
Hình 4-2: Sơ đồ cấu trúc bộ biến đổi
Uđk K
BĐUư
TBĐP + 1
Chương IV: Khảo sát chất lượng hệ thống truyền động điện
59
dk
d
BD U
U
K=
s
fm
TBD 005,0
50.22
1
.2
1===
E
d = Ed0 . Cosα
Mà Ed = 220
⇒220 = Edo . Cosα.
Tính V
U
Ed 270300.9,0
2.2.2
0===
π
Vậy 220 = 270 . Cosα
⇒ 814,0
270
220
Cos ==
α
⇒ α =39,40.
Từ đồ thị khâu so sánh điện áp răng cưa và điện áp điều khiển ta có:
maxmax
max 1
c
dk
c
dkc
U
U
U
UU
ΓΓ
Γ−=
−
=
π
α
Rút Uđk ta có
maxcdk U1U Γ
⎟
⎠
⎞
⎜
⎝
⎛
π
α
−=
Mà Urcmax đã có là 2,25 V nên ta được
VUdK 75,125,2
180
4,39
1=
⎟
⎠
⎞
⎜
⎝
⎛−=
Vậy 7125
751
220
U
U
K
dk
d
BD ,
,===
Chương IV: Khảo sát chất lượng hệ thống truyền động điện
60
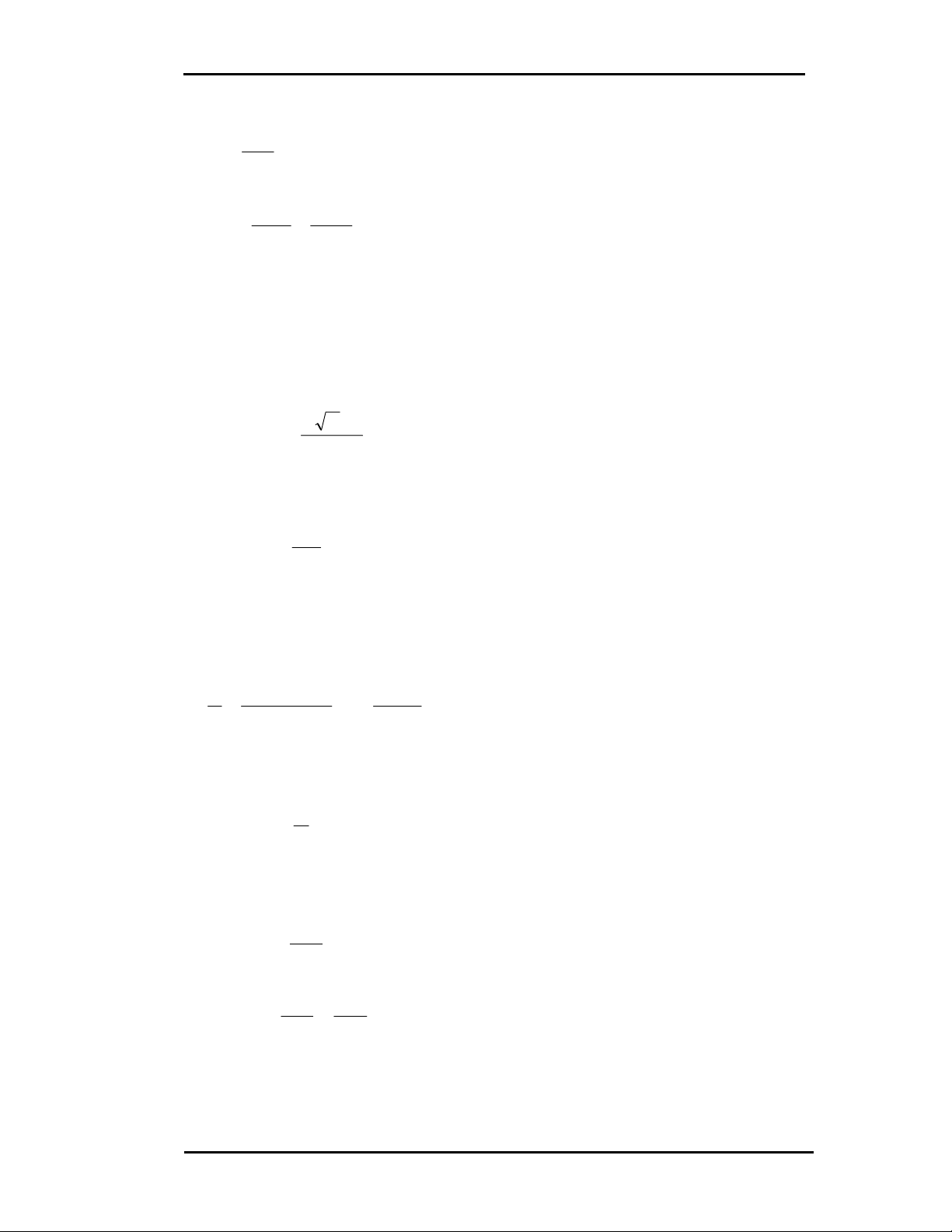
4.4. Mạch điều chỉnh dòng điện.
Hình 4-3: Sơ đồ nguyên lý mạch điều chỉnh dòng điện
R13 = 10K
R
1 = 18K
R
9 = 15K
R
10 = 22 K
R
12 = 22 K
C
3 = 0,22 μ
C
4 = 1 μ
Ta có
AV29730
2112
666
I2
U
Ki
dm
i/,
,.
,
max ===
T
Ri = R13 . C4 = 10 . 103 . 10 -6 = 0,01s
Ucđ
Ui
R1
R1
0
R
12
R
9
R13 C
4
Ura
+
-
U’i
C3
Chương IV: Khảo sát chất lượng hệ thống truyền động điện
61
i
12
4C
13
cdi
91
4C
13
ra U
R
P
1
R
U
RR
P
1
R
U'
.
.
.
⋅−
+
=
= ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛⋅−
+iU
R
R
iU
RR
P
R
cd
C'
1
.
12
13
91
4
13
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛⋅
+
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
+
=icdtra U
R
RR
U
RPCRR
R
U'
.
1
1
12
91
13491
13
Trong đó:
sTRiRC
RR
R
001,0134
303,0
33
10
91
13
==⋅
==
+
u
IKi
PR
Ui
PR
Ui
PC
R
PC
cU ⋅⋅
+
=⋅
+
=⋅
+
=1
1
1
1
1
1
'
1010
3
10
3
⇒ TiPRPCIuKi
iU
+
=
+
=1
1
.1
1
.
'
103
Mà Ti = R10 . C3 = 22.103.0,22.10-6 = 4,84 . 10-3 s.
Vậy ta có:
Hình 4-4: Sơ đồ cấu trúc bộ điều chỉnh dòng điện
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
+Ri91
13
PT
1
1
RR
R
Ki
I
PT+1
1
12
91
R
RR +
Ucđi Ura
Iư
-

![Hệ thống Clutch: [Thêm từ khóa phụ/mô tả chi tiết để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151126/phatheodk/135x160/7401448475025.jpg)


![Truyền Động Bánh Răng: [Thêm từ khóa giá trị/mô tả phù hợp với nội dung]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140527/thanhmm47/135x160/1682586_066.jpg)


![Động Cơ Servo: Giới thiệu chi tiết về [Động Cơ Servo]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130410/dangquoctam/135x160/7421365530622.jpg)
![Ôtô Động Cơ Đốt Trong: Khái Quát Chung [CHƯƠNG I]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130309/09124054/135x160/1421362812210.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)