TR NG ĐI H C S PH M KƯỜ Ạ Ọ Ư Ạ Ỹ
THU TẬ
THÀNH PH H CHÍ MINHỐ Ồ
KHOA C KHÍ CH T O MÁYƠ Ế Ạ
B MÔN C ĐI N TỘ Ơ Ệ Ử
-------------------------
Đ THI CU I K H C K 1, NĂM H C 17-18Ề Ố Ỳ Ọ Ỳ Ọ
Môn: H TH NG TRUY N ĐNG SERVOỆ Ố Ề Ộ
Mã môn h c: ọSERV424029
Đ s : ề ố 01; Đ thi có 2 trang.ề
Th i gian: ờ60 phút.
Đc phép s d ng tài li uượ ử ụ ệ
Bài 1: (3đ)
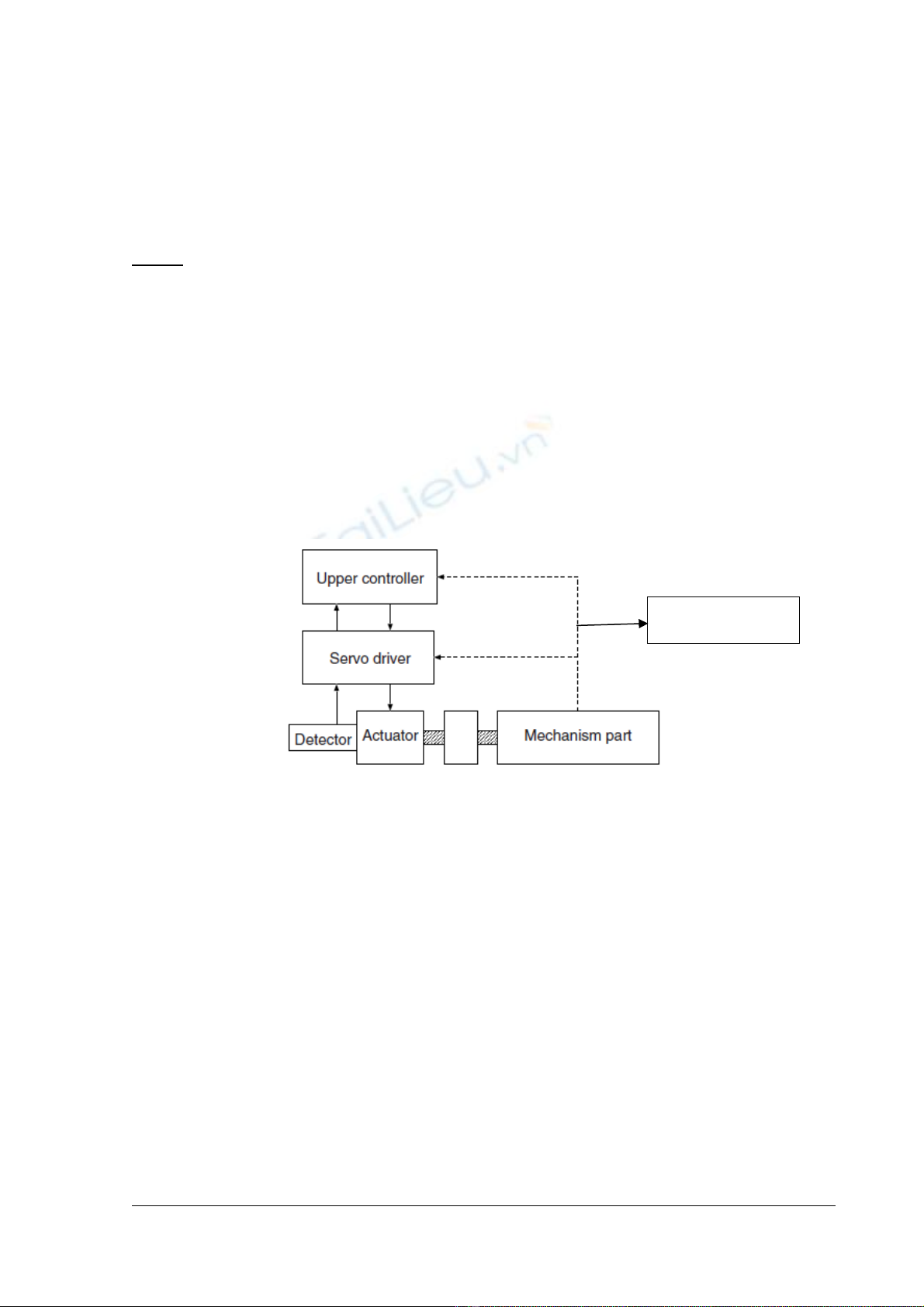
a. Drawing a general diagram of a servo system for a 3-axis CNC machine using
DC servo motors.
It is similar to the figure 2.1 in the lecture note (chapter 2)
b. What are differences between semi-closed loop and full-closed loop system?
According to your diagram from (a), is it a open-loop, semi-closed loop or full-
closed loop system?
In many servo systems, a feedback system can be only established based on the
information of servo actuator. This kind of control system is called a semi-
closed loop. Otherwise, a full closed-loop is a system that feedback information
is obtained from a mechanism part
According to the diagram, it is a semi-closed loop system because there are
only feedback loops from the servo actuators.
c. Express the advantages and disadvantages of a servo system using DC servo
motors? Choose a reason that makes DC servo motors less common in
industrial applications?
Advantages:
-Smooth rotation at low speeds and capability of high speed applications (up
to 5000 RPM).
-No power used at standstill: with no static loads on the motor, no current is
required to hold position
-Wide variety of types available: being produced in many styles including
very low inertia types for high dynamic applications.
-Closed-loop control: high precision in trajectory control
Disadvantages:
S hi u: BM1/QT-PĐBCL-RĐTVố ệ 1
Full-closed loop
-Brush maintenance: limiting their use in clean rooms, and other
environments where brush dust is not acceptable.
-Poor thermal performance: all the heat is generated in the rotor, from
which the thermal path to the outer casing is very inefficient.
-Increased installed cost: the installed cost of a DC servo system is higher
than that of a stepper due to the requirement for feedback components.
The reason that makes DC servo motors less common in industrial
applications is brush maintenance
Bài 2: (4đ)
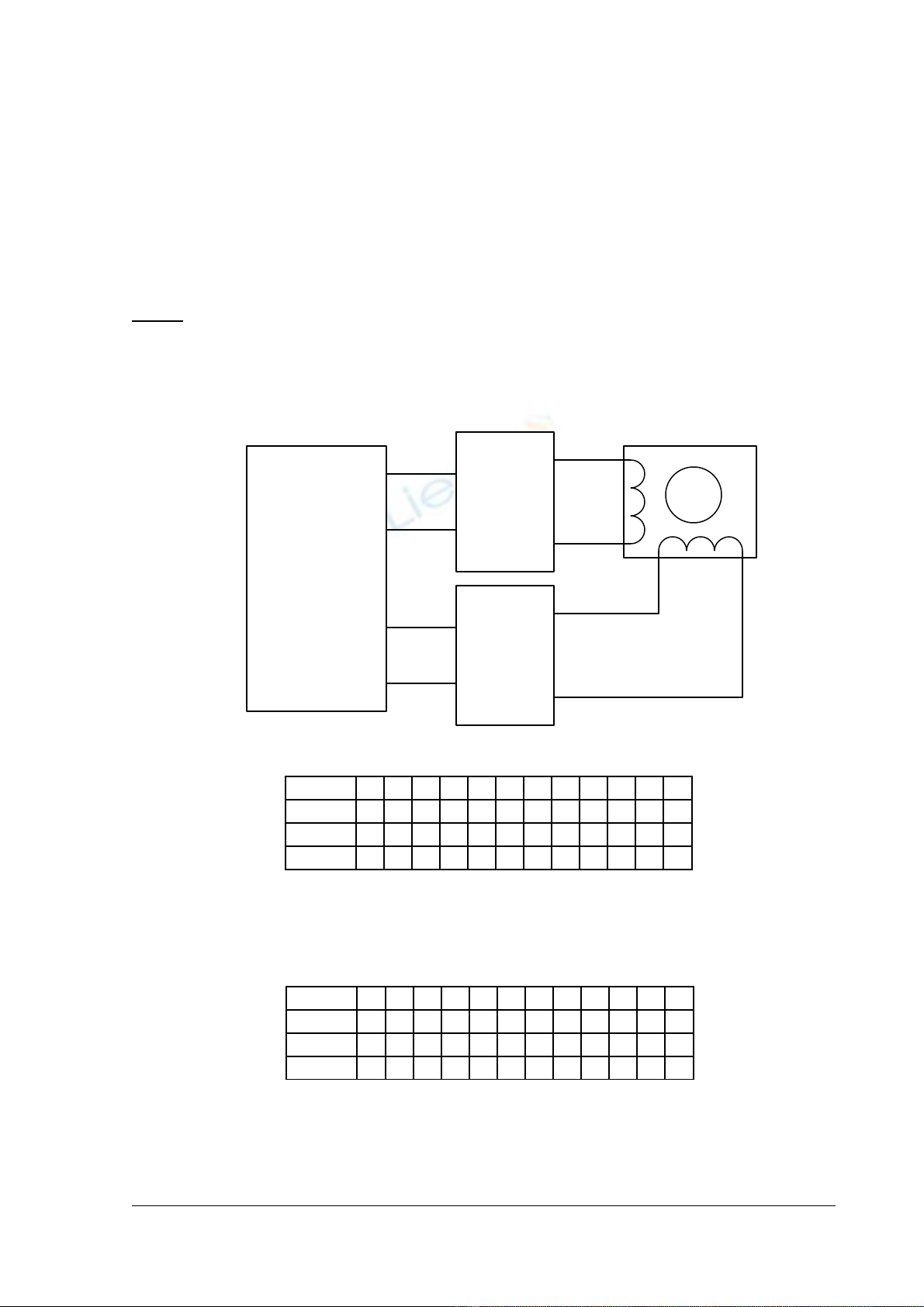
a. V s đ kh i m ch đi u khi n đng c b c l ng c c (bipolar)? Vi t l uẽ ơ ồ ố ạ ề ể ộ ơ ướ ưỡ ự ế ư
đ gi i thu t đi u khi n đng c trên 2 ch đ ồ ả ậ ề ể ộ ơ ở ế ộ “1 phase ON” và “2 phase
ON”? L i ích c a vi c đi u khi n “2 phase ON” là gì?ợ ủ ệ ề ể
H-Bridge 1
H-Bridge 2
IN 1
IN 2
IN 3
IN 4
CONTROLLER
OUT 1
OUT 2
OUT 3
OUT 4
1 phase ON
OUT1 + 0 - 0 + 0 - 0 + 0 - 0
OUT2 - 0 + 0 - 0 + 0 - 0 + 0
OUT3 0 + 0 - 0 + 0 - 0 + 0 -
OUT4 0 - 0 + 0 - 0 + 0 - 0 +
D a vào b ng trên sinh viên v l i l u đ gi i thu tự ả ẽ ạ ư ồ ả ậ
2 phase ON
OUT1 + + - - + + - + + 0 - -
OUT2 - - + + - - + - - 0 + +
OUT3 - + + - - + + - + + + -
OUT4 + - - + + - - + - - - +
D a vào b ng trên sinh viên v l i l u đ gi i thu tự ả ẽ ạ ư ồ ả ậ
Đi u khi n “2 phase ON” giúp tăng moment l c c a đng c lên kho ngề ể ự ủ ộ ơ ả
30%-40% so v i “1 phase ON”ớ
S hi u: BM1/QT-PĐBCL-RĐTVố ệ 1
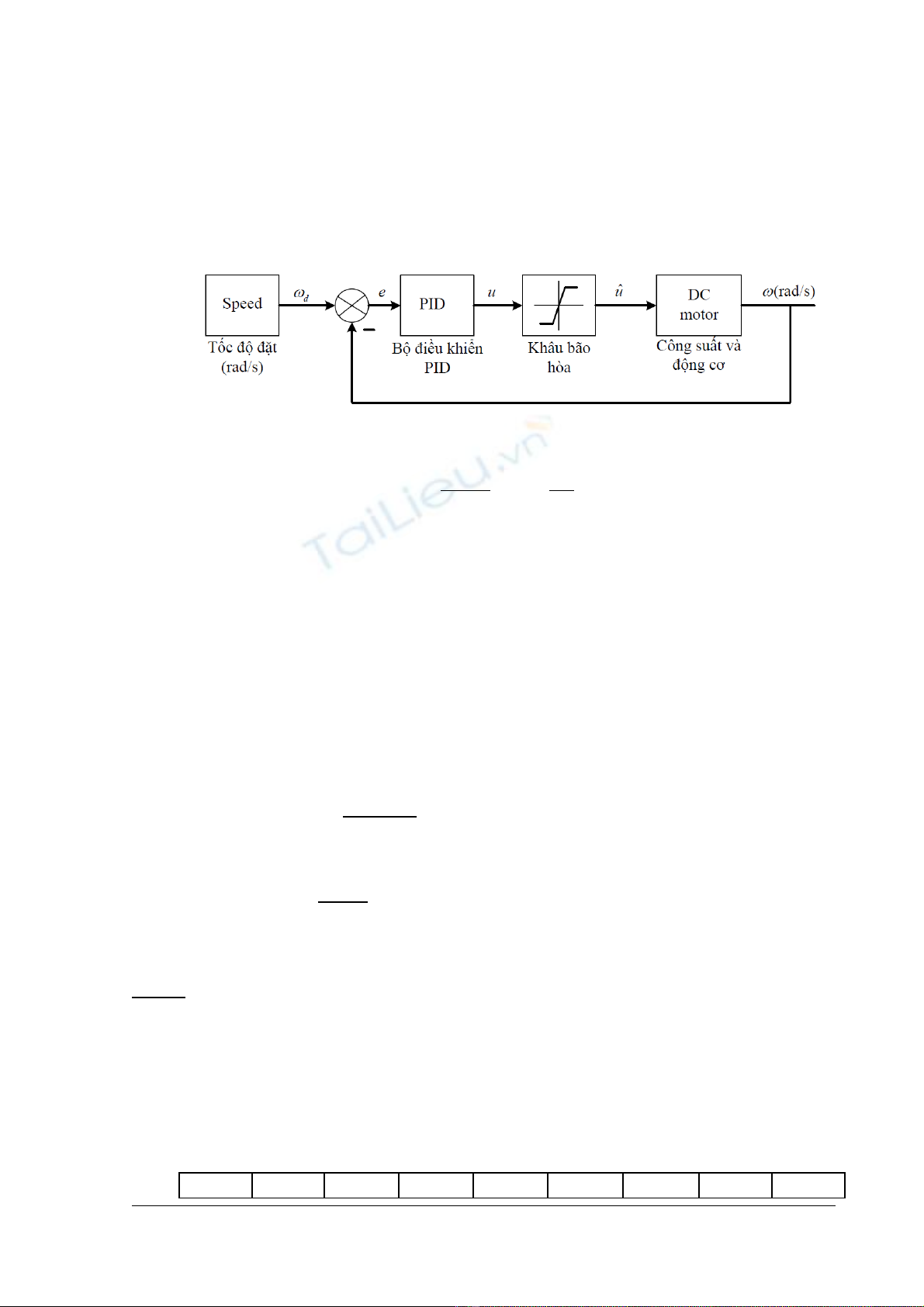
b. Cho s đ kh i b đi u khi n t c đ đng c DC servo nh hình:ơ ồ ố ộ ề ể ố ộ ộ ơ ư
Đ gi m nh h ng c a vi c t c đ đt thay đi đt ng t và s nh y v iể ả ả ưở ủ ệ ố ộ ặ ổ ộ ộ ự ạ ớ
nhi u t n s cao c a khâu D, ta s d ng b đi u khi n PID s a đi nh sau:ễ ầ ố ủ ử ụ ộ ề ể ữ ổ ư
( ) ( ) ( ) ( )
1
D I
p
K s K
U s K E s s E s
Ns s
= − +
+
ω
Vi t gi i thu t PID cho b đi u khi n s b t k s d ng ph ng trình trên?ế ả ậ ộ ề ể ố ấ ỳ ử ụ ươ
Tính sai số
d
k k k
e
ω ω
= −
(2.1)
Khâu P:
P
k p k
u K e=
(2.2)
Khâu I (s d ng công th c tích phân lùi)ử ụ ứ
1
I I
k k I k
u u K Te
−
= +
(2.3)
T: th i gian l y m u (s)ờ ấ ẫ
Khâu D:
1
( )
Dk k
D
u k K T
ω ω
−
−
=
(2.4)
( ) (1 ) ( 1) ( )
D D D
f f
u k u k u k
α α
= − − +
(2.5)
V i ớ
T
T N
α
=+
(
0 1
α
<
)
S d ng các ph ng trình (2.1) đn (2.5) sinh viên vi t l i l u đ gi i thu tử ụ ươ ế ế ạ ư ồ ả ậ
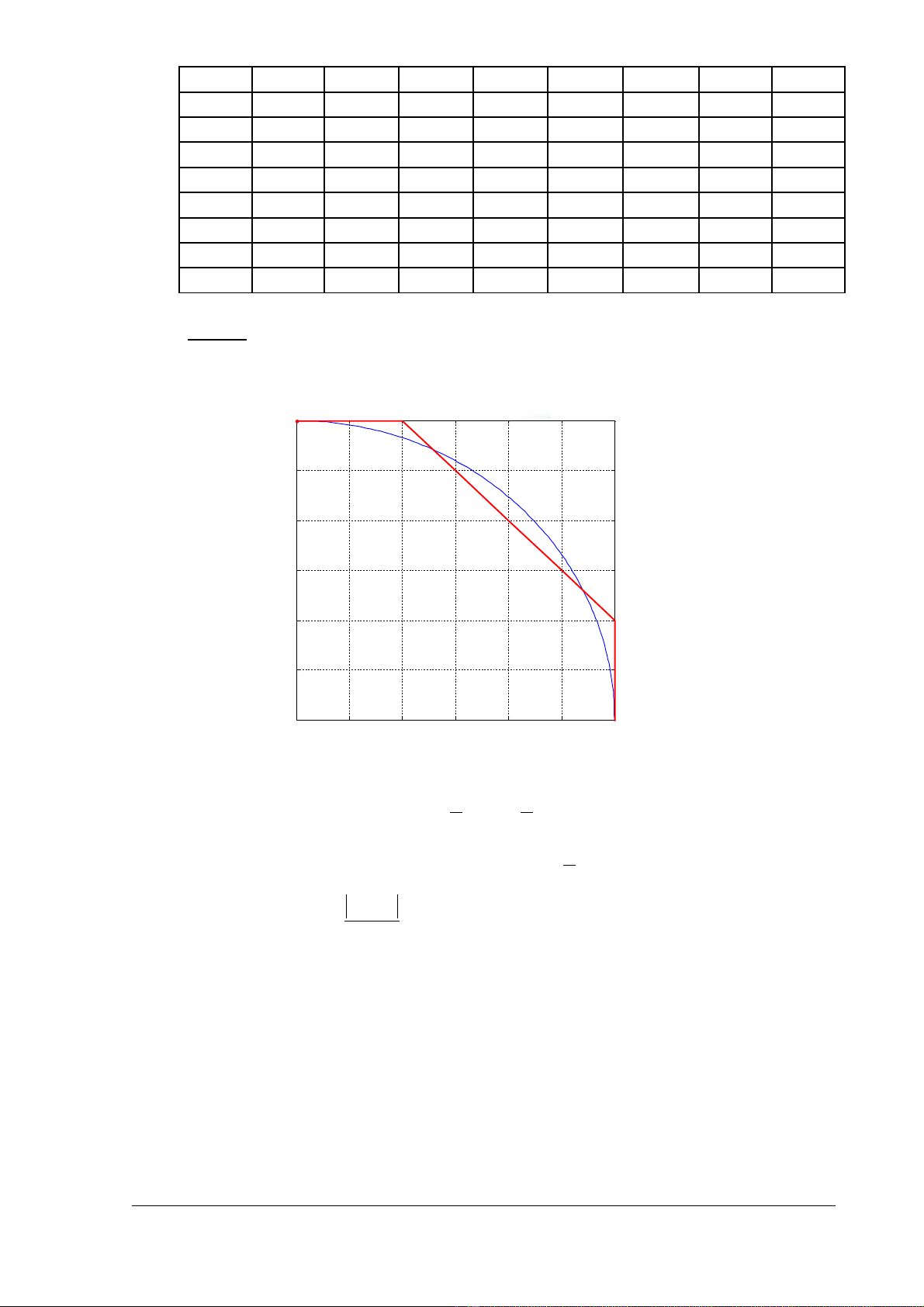
Bài 3: (3đ) S d ng gi i thu t DS đ n i suy 1 cung tròn góc ph n t I, theoử ụ ả ậ ể ộ ở ầ ư
chi u kim đng h (CW), R=6.ề ồ ồ
a. L p b ng tính các giá tr c n thi t theo l u đ gi i thu t?ậ ả ị ầ ế ư ồ ả ậ
b. V k t qu ch y đc theo b ng câu a?ẽ ế ả ạ ượ ả
c. Tính sai s c a hình n i suy đc?ố ủ ộ ượ
a.
D D1 D2 D3
∆
X
∆
Y X Y
S hi u: BM1/QT-PĐBCL-RĐTVố ệ 1
0 0 1 -11 0 0
1 1 1 -11 -10 3 -11 1 0
2 4 4 -10 -7 5 -11 1 0
3 -2 9 -7 -2 7 -9 1 1
4 -4 5 -11 -4 9 -7 1 1
5 -2 5 -11 -2 11 -5 1 1
6 4 9 -7 4 13 -3 1 1
7 1 17 1 14 13 -1 0 1
8 0 14 0 13 13 1 0 1
L u ý:ư X =1 nghĩa là tăng 1 BLU theo tr c Xụ
Y= 1 nghĩa là gi m 1 BLU theo tr c Yả ụ
b.
0 1 2 3 4 5 6
0
1
2
3
4
5
6
c.
Di n tích c a ¼ cung tròn: ệ ủ
2 2
1 1 3.14 6 28.26
4 4
S R
π
= = =
Di n tích c a hình n i suy đc: ệ ủ ộ ượ
1
1
2 6 (2 6)4 28
2
S= + + =
Sai s n i suy ố ộ
1
100% 0.9%
S S
S
ε
−
= =
S hi u: BM1/QT-PĐBCL-RĐTVố ệ 1

S hi u: BM1/QT-PĐBCL-RĐTVố ệ 1


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)