
LẠI KHẮC LÃI, NGUYỄN NHƯ HIỂN
GIÁO TRÌNH
ĐIỀU KHIỂN SỐ
NHÀ XUẤT BẢN KHOA HỌC VÀ KỸTHUẬT
HÀ NỘI – 2007

Giáo trình điều khiển số 2
LỜI NÓI ĐẦU
Cuốn giáo trình Điều khiển số được viết dựa trên đề cương chi tiết
môn học Điều khiển số hiện đang dùng cho sinh viên ngành Điều khiển
tự động - Trường Đại học Kỹ thuật công nghiệp, đồng thời các tác giả có
tham khảo và điều chỉnh cho phù hợp với chương trình đào tạo phần kiến
thức cơ sở bắt buộc đối với khối các trường kỹ thuật ngành Điện đã được
Hội đồng ngành thông qua tháng 2/2004.
Sách có thể được dùng làm tài liệu chính cho sinh viên ngành Điều
khiển tự động, ngoài ra sách còn được dùng làm tài liệu tham khảo cho
sinh viên các ngành khác và cho học viên cao học Điện.
Trong quá trình biên soạn, không tránh khỏi còn nhiều sai sót, các tác
giả mong nhận được ý kiến đóng góp của đồng nghiệp và bạn đọc.
Các tác giả
Giáo trình điều khiển số 3
CHƯƠNG 1
NHỮNG KHÁI NIỆM CƠ BẢN VỀ ĐIỀU KHIỂN SỐ
1.1. KHÁI NIỆM
Tuỳ theo tính chất của tín hiệu mà hệ thống điều khiển tự động được
phân thành hệ liên tục và hệ gián đoạn.
Nếu tất cả các phần tử trong hệ thống có tín hiệu truyền đi là liên tục
gọi là hệ thống liên tục.
Nếu trong mắt xích điều khiển có một khâu tín hiệu truyền đi là gián
đoạn gọi là hệ thống gián đoạn.
Trong bất kỳ hệ gián đoạn nào cũng có một phần tử làm nhiệm vụ
chuyển tín hiệu liên tục thành gián đoạn, quá trình đó gọi là quá trình
lượng tử hoá.
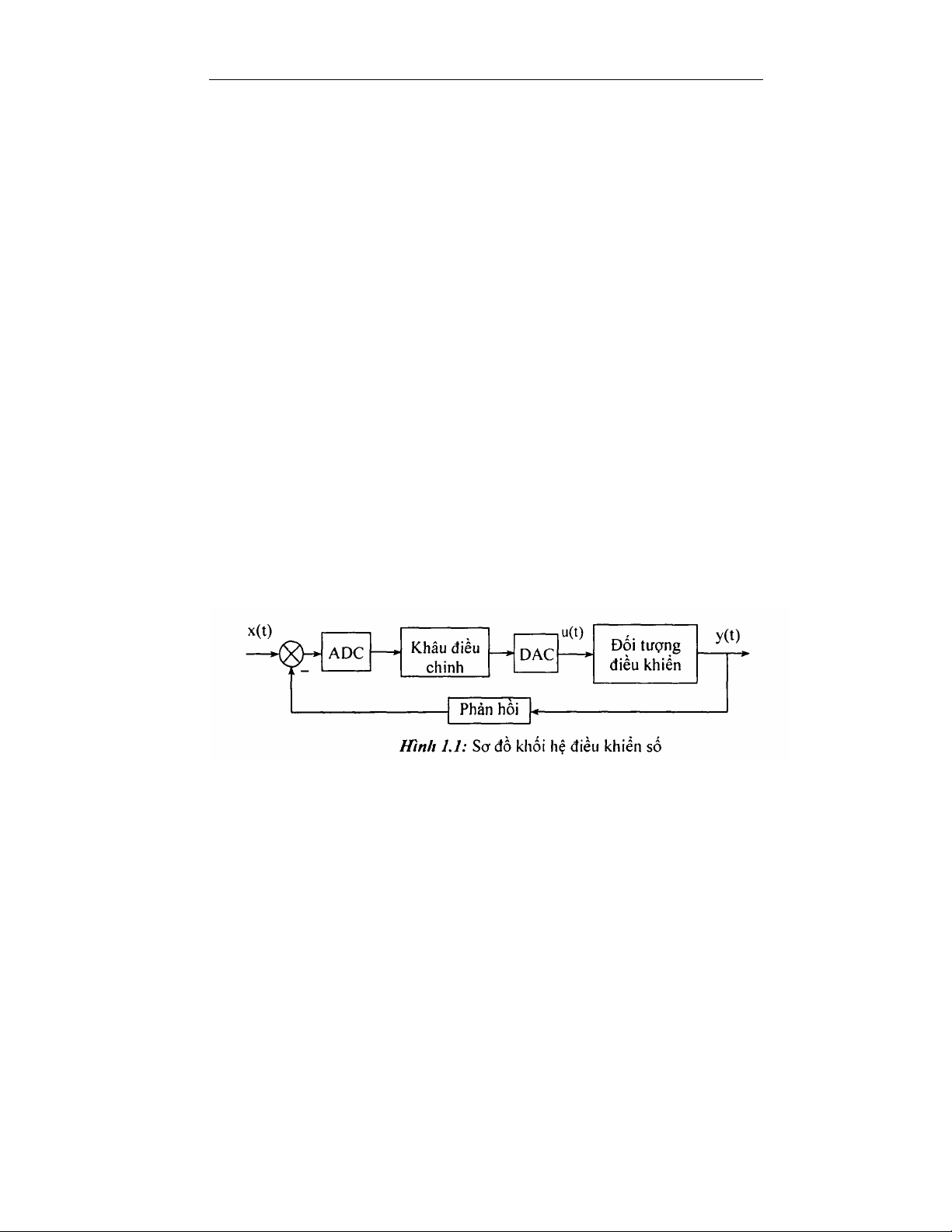
Hệ điều khiển số bao gồm hệ thu nhập xử lý tín hiệu vi xử lý, vi điều
khiển, các hệ thống lớn có máy tính số... Sơ đồ khối của một hệ điều
khiển số được chỉ ra trên hình 1.1.
Hệ thống điều khiển số bao gồm hai loại khâu cơ bản:
- Khâu có bản chất gián đoạn: Các tín hiệu vào và ra trạng thái đều
gián đoạn về thời gian và mức. Khâu này mô tả các thiết bị điều khiển
digital.
- Khâu có bản chất liên tục: Mô tả đối tượng điều khiển. Việc gián
đoạn hoá xuất phát từ mô hình trạng thái liên tục của đối tượng.

Giáo trình điều khiển số 4
- Bộ biến đổi A/D: làm nhiệm vụ biến đổi tín hiệu từ tín hiệu tương
tự sang tín hiệu số.
- Bộ biến đổi D/A: làm nhiệm vụ biến đổi tín hiệu số sang tín hiệu
tương tự.
- Bộ điều chỉnh có thể là vi xử lý (µP), có thể là vi điều khiển (µC).
1.1.1. Bộ biến đổi A/D
Mô hình quá trình biến đổi tín hiệu liên tục thành tín hiệu gián đoạn
như hình 1.2
Việc biến đổi tử tín hiệu liên tục thành tín hiệu rời rạc gọi là quá
trình cắt mẫu, thông thường khoảng thời gian cắt mẫu là không đổi. Giữa
hai lần lấy mẫu liên tiếp nhau, bộ cắt mẫu không nhận một thông tin nào
cả. Phần tử lưu giữ sẽ chuyển đổi tín hiệu đã được lấy mẫu thành tín hiệu
gần liên tục, tiệm cận với tín hiệu trước, khi nó được lấy mẫu. Phần tử
lưu giữ ở đây đơn giản nhất là phần tử chuyển đổi tín hiệu mẫu thành tín
hiệu có dạng bậc thang và không đổi giữa hai thời điểm lấy mẫu gọi là
phần tử lưu giữ bậc không.
1.1.2. Bộ biến đổi D/A
Tín hiệu số được xử lý từ máy tính hoặc từ hệ VXL cần phải chuyển
sang tín hiệu tương tự để điều khiển khâu chấp hành. Vì vậy cần có bộ
biến đổi từ tín hiệu số sang tín hiệu tương tự gọi tắt là D/A. Mô hình bộ
chuyển đổi D/A như hình 1.3.
Giáo trình điều khiển số 5
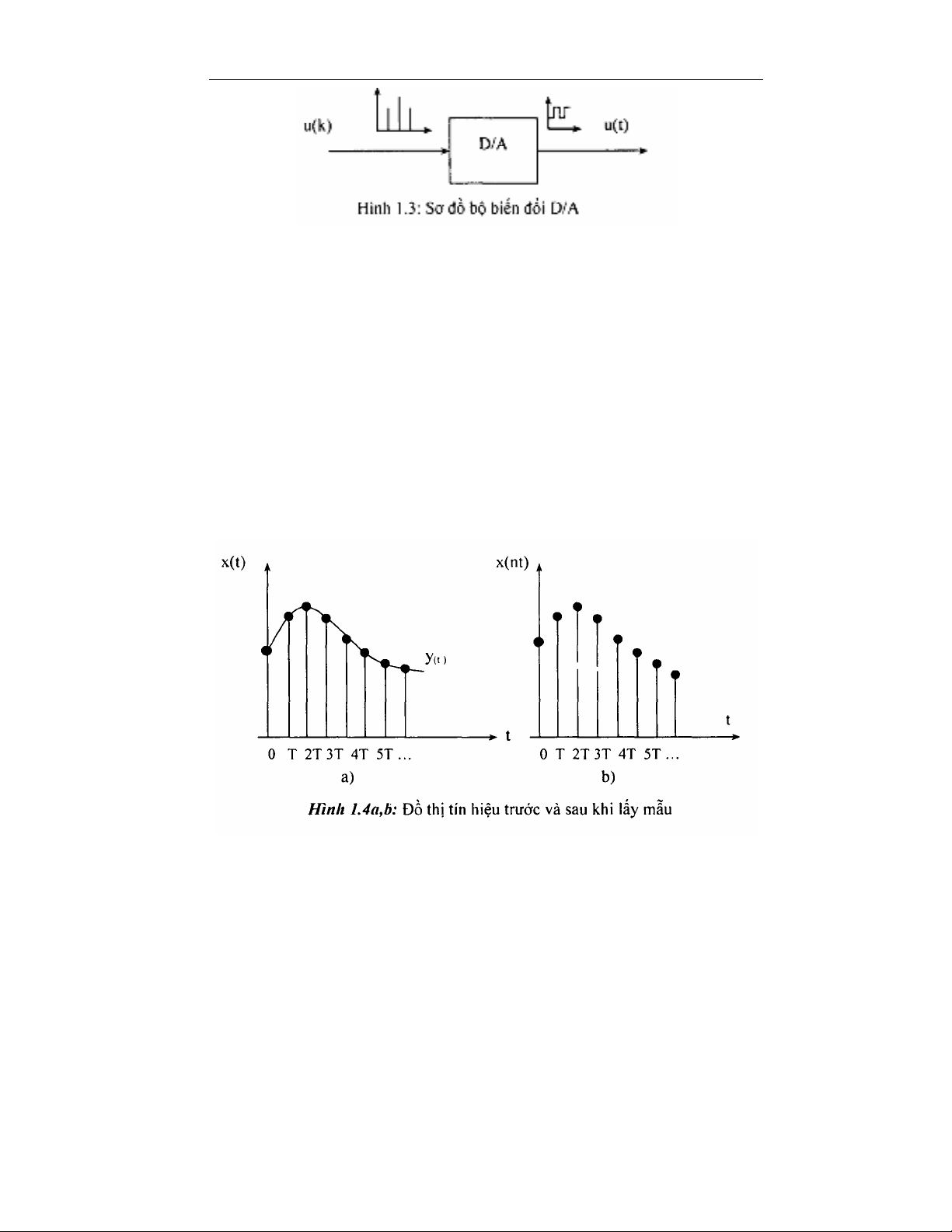
1.2. TÍN HIỆU VÀ LẤY MẪU TÍN HIỆU
1.2.1. Lấy mẫu tín hiệu
Trong hệ thống điều khiển số tồn tại hai loại tín hiệu: Tín hiệu liên
tục và tín hiệu rời rạc, trong khi đó tín hiệu đưa vào đối tượng điều
khiển và tín hiệu đo lường là tín hiệu liên tục. Để đưa tín hiệu đó vào
máy tính số ta phải biến đổi tín hiệu từ liên tục sang rời rạc.
Ta xét tín hiệu liên tục như hình vẽ hình 1.4a, ta chia trục thời gian
thành những khoảng bằng nhau ∆t1 =∆t2= ∆t3 = … = T, tín hiệu sẽ được
lấy mẫu tại những khoảng thời gian đó. Sau lấy mẫu tín hiệu có giá trị tại
những điểm rời rạc nT.
Với cách lấy mẫu như trên thì hàm x(t) được mô tả bởi chuỗi số sau:
x(T), x(2T), x(3T),... x(nT). Nó cho biết giá trị của hàm liên tục x(t) tại
những điểm rời rạc 0, T, 2T,... nT. Giá trị hàm x(t) ở điểm khác có được
bằng phương pháp nội suy. Trong thực tế khâu điều khiển và đối tượng
![Giáo trình Điều khiển số Phần 2: [Thêm từ khóa mô tả nội dung chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/37201772766913.jpg)

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)