Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 4: Điều khiển định hướng từ thông ĐCKĐB IV.1
Chương 4: ĐIỀU KHIỂN ĐỊNH HƯỚNG TỪ THÔNG
ĐCKĐB
I. Hiệu chỉnh PID (PID CONTROL)
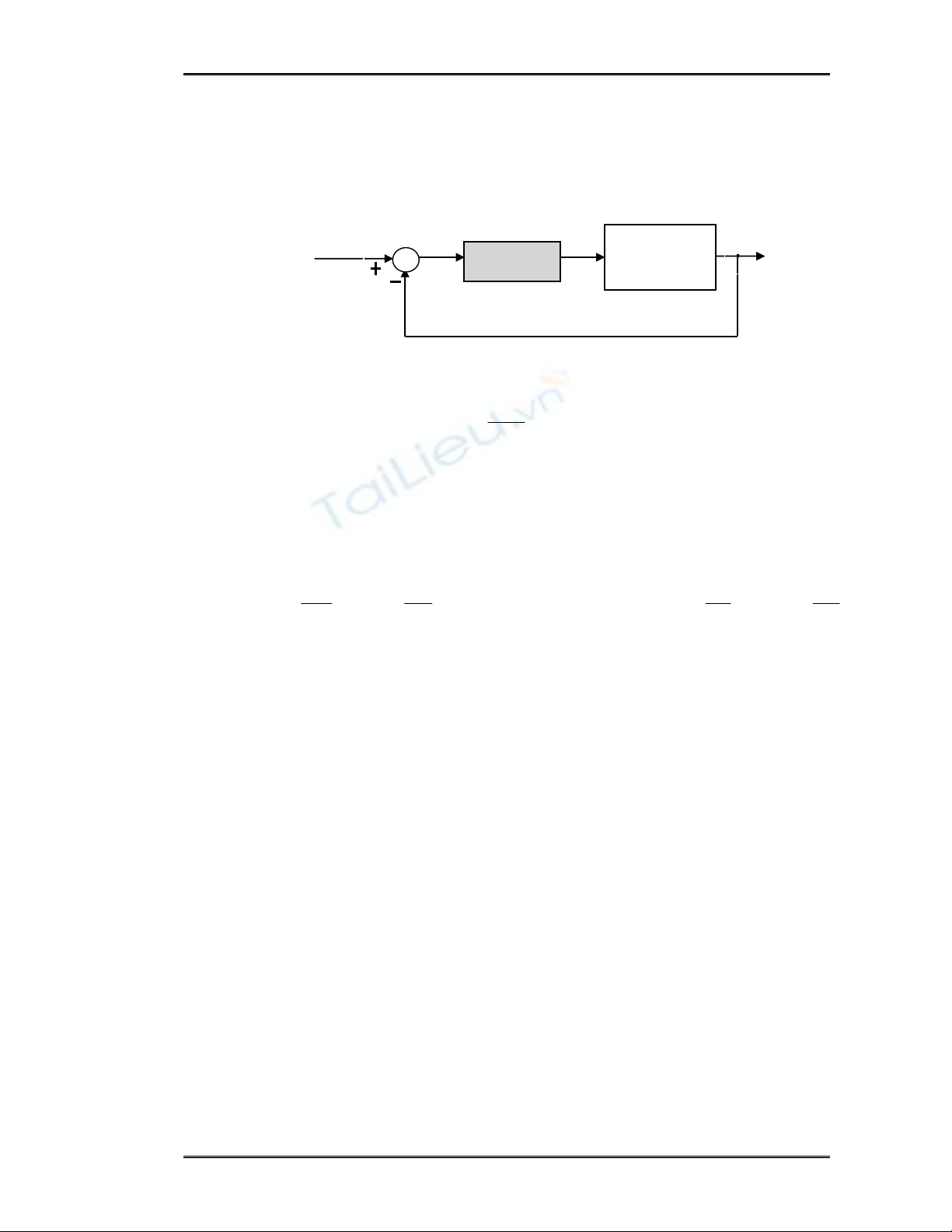
Phương trình vi phân mô tả hiệu chỉnh PID:
u(t) = KP e(t) + KI
∫
dt)t(e + KDd
t
)t(de
KP: hệ số khâu tỉ lệ.
KI: hệ số khâu tích phân.
KD:hệ số khâu vi phân.
Biến đổi Laplace:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛++== s.T
s.T
1
1K
)s(e
)s(u
)s(G D
I
p trong đó:
P
D
D
I
P
IK
K
T,
K
K
T==
Vấn đề thiết kế là cần hiệu chỉnh các giá trị K p, K i và K D sao cho hệ thỏa đạt
được chất lượng tối ưu.
Thủ tục hiệu chỉnh PID
Khâu hiệu chỉnh khuếch đại tỉ lệ (P) được đưa vào hệ thống nhằm làm giảm
sai số xác lập, với đầu vào thay đổi theo hàm nấc sẽ gây ra vọt lố và trong một số
trường hợp là không chấp nhận được đối với mạch động lực.
Khâu tích phân tỉ lệ (PI) có mặt trong hệ thống dẫn đến sai lệch tĩnh triệt tiêu
(hệ vô sai). Muốn tăng độ chính xác của hệ thống ta phải tăng hệ số khuyếch đại,
xong với mọi hệ thống thực đều bị hạn chế và sự có mặt của khâu PI là bắt buộc.
Sự có mặt của khâu vi phân tỉ lệ (PD) làm giảm độ vọt lố, đáp ứng ra bớt nhấp
nhô và hệ thống sẽ đáp ứng nhanh hơn.
Khâu hiệu chỉnh vi tích phân tỉ lệ (PID) kết hợp những ưu điểm của khâu PD
và khâu PI, có khả năng tăng độ dự trữ pha ở tần số cắt, khử chậm pha. Sự có mặt
của khâu PID có thể dẫn đến sự dao động của hệ do đáp ứng quá độ bị vọt lố bởi
hàm dirac δ(t). Các bộ hiệu chỉnh PID được ứng dụng nhiều trong lĩnh vực công
nghiệp dưới dạng thiết bị điều khiển hay thuật toán phần mềm.
e(t) u(t)
PID Đối tượng
điều khiển
c(t)
r(t)
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 4: Điều khiển định hướng từ thông ĐCKĐB IV.2
Tóm tắt Vai trò của mỗi khâu hiệu chỉnh (adjustment) trong bộ điều khiển PID:
Khâu khuếch đại tỉ lệ Kp (Proportional gain):
Khi Kp tăng
Sai số xác lập giảm
Vọt lố tăng
Thời gian lên nhanh
Khâu tích phân tỉ lệ Ki (Integral gain):
Khi Ki tăng
Sai lệch tĩnh giảm (triệt tiêu - vô sai với hàm nấc)
Đáp ứng chậm
Khâu vi phân tỉ lệ Kd (Derivative gain):
Khi Kd tăng
Vọt lố giảm
Đáp ứng nhanh
Bớt nhấp nhô (dao động)
PI rời rạc:
u(k)=u p(k)+u I(k)
up(k)=K p.e(k)
uI(k)= u I(k-1)+K I.T.e(k)
Trong đó:T là tần số lấy mẫuu khiển động cơ DC
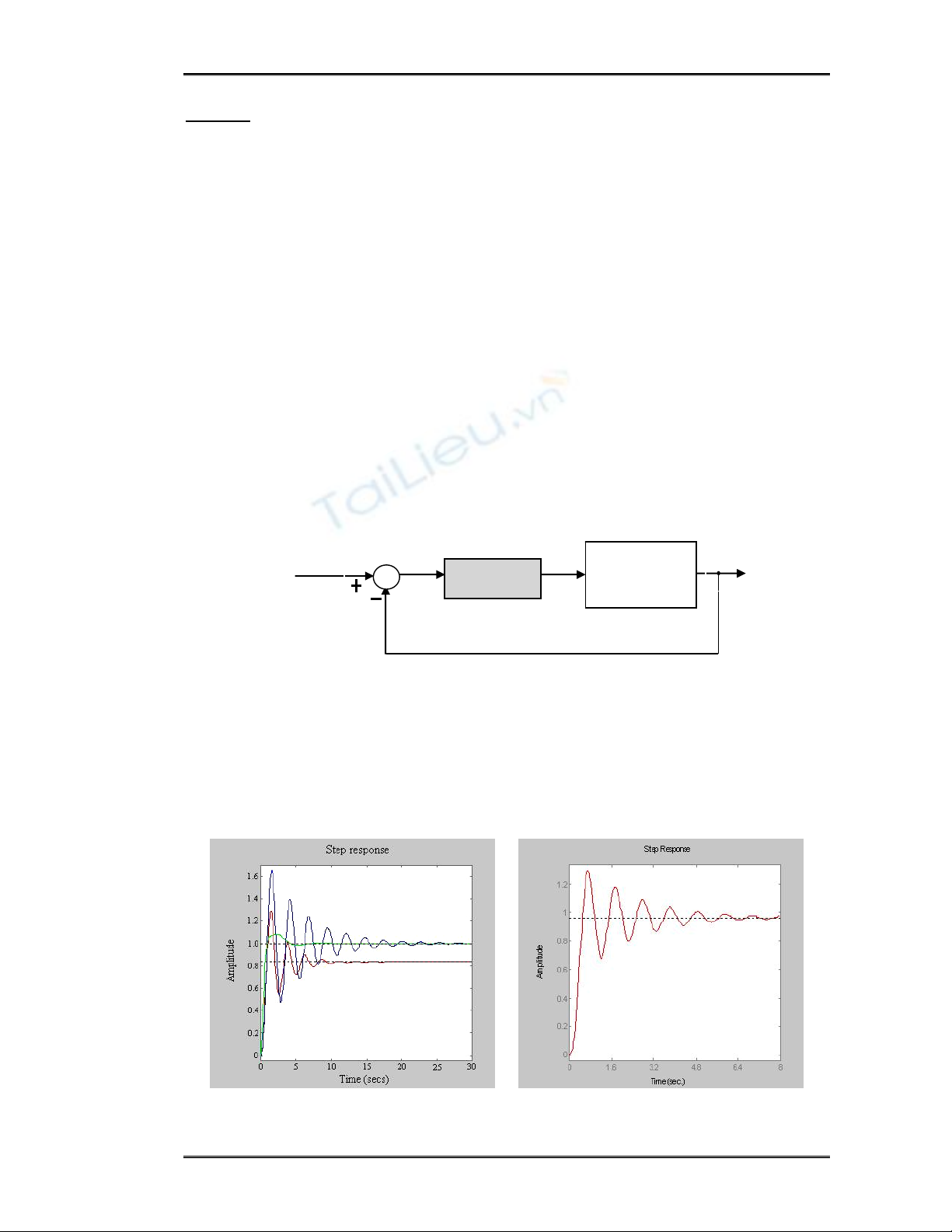
Đáp ứng của hệ thống sử dụng bộ điều khiển PID
Đáp ứng bước hàm nấc 1(t)
e(k) u(k)
PID SỐ Đối tượng
điều khiển
c(k)
r(k)
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 4: Điều khiển định hướng từ thông ĐCKĐB IV.3
II. Điều khiển tiếp dòng
III. Điều khiển tiếp áp
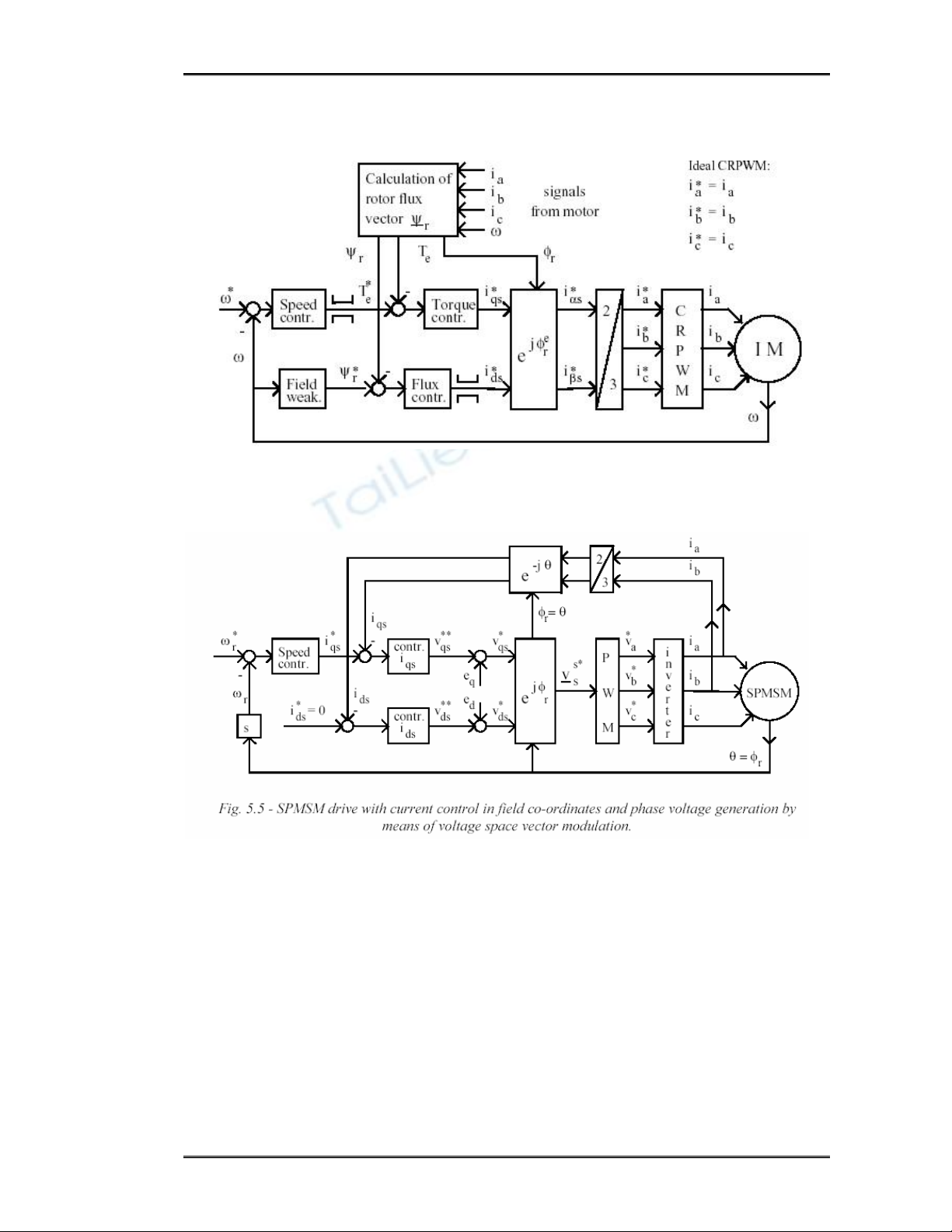
IV. Phương pháp điều khiển định hướng trường (FOC)
IV.1. Giới thiệu
Cấu trúc của hệ thống điều khiển định hướng trường định hướng trường
(Field Oriented Control -FOC) trong điều khiển động cơ không đồng bộ ba pha
được trình bày trong hình vẽ sau:
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 4: Điều khiển định hướng từ thông ĐCKĐB IV.4
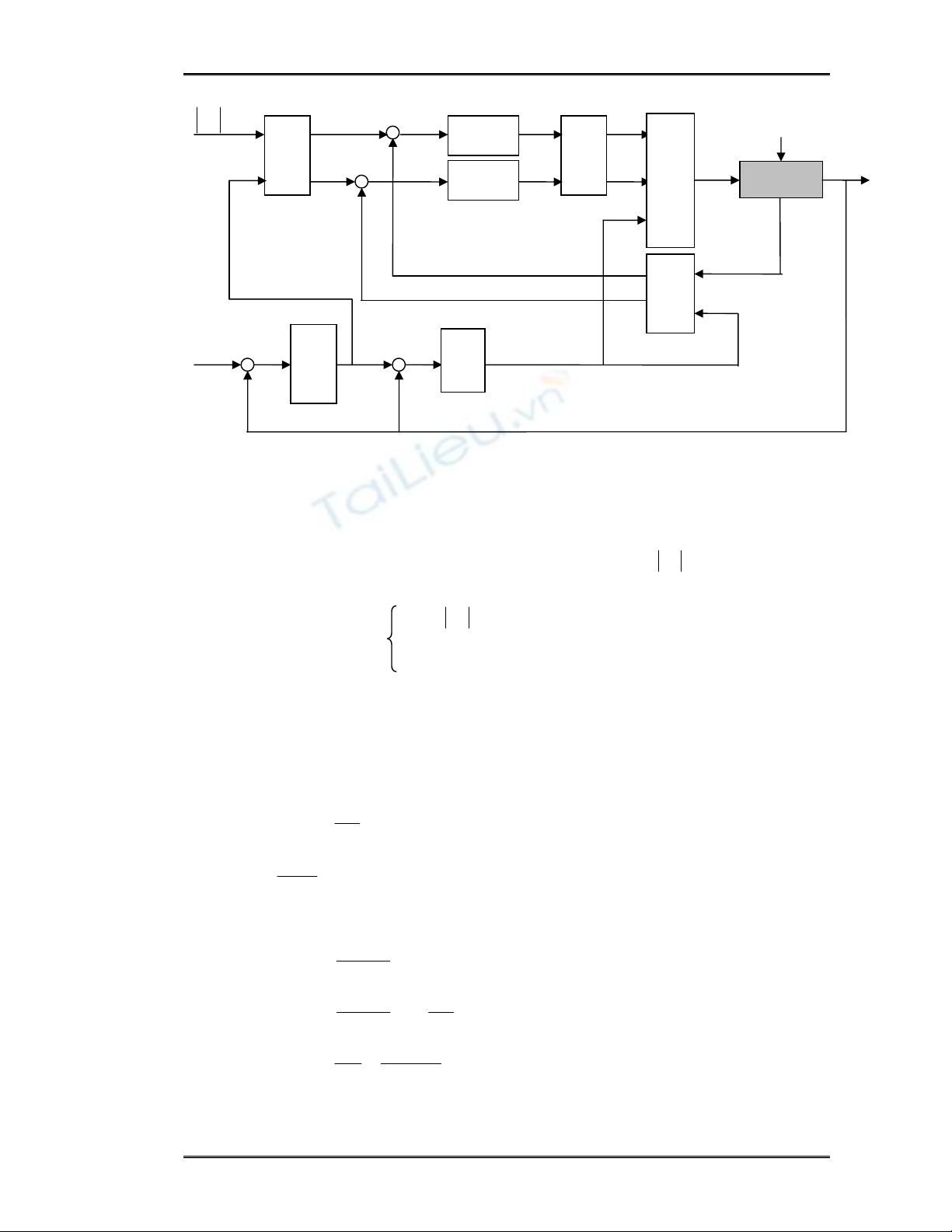
Hình 4.1: Cấu trúc của hệ thống điều khiển ĐCKĐB ba pha dùng FOC
Bằng việc mô tả ĐCKĐB ba pha trên hệ tọa độ từ thông rotor, vector s
i
r
sẽ
chia thành hai thành phần: isd để điều khiển từ thông rotor r
ψ
r
, isq để điều khiển
momen quay Te, từ đó có thể điều khiển tốc độ của động cơ.
(4.1a)
(4.1b)
IV.2. Xây dựng thuật toán điều khiển
Giải thuật của từng khối trong hệ thống điều khiển định hướng trường (hình
4.1) được trình bày như sau:
Mạng tính dòng (MTi)
()
m
*
r
r
*
sd L
sT1i Ψ
+= (4.2a)
*
r
m
*
rr
*
sq L
T
i
ω
Ψ
= (4.2b)
Mạng tính áp (MTu)
q
s
s
dssd y
sT1
L
yRu
σ
σ
+
−= (4.3a)
*
d
r
r
m
d
s
s
qssq L
L
y
sT1
L
yRu Ψ+
+
+=
σ
σ (4.3b)
Trong đó,
s
ms
s
s
sR
LL
R
L
T
−
== σ
σ
Tính góc θr
TL
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
b
a
i
i
MTu
BBĐ
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
c
b
a
u
u
u
ω
Động cơ
–
*
sd
i + ĐCid
ĐCiq
MTi
–
+
*
r
ψ
CTĐi
ĐCω
–
+
ω
*
ω
+
+
ω
*
r
ω
*
r
ω
s
ω
r
θ
*
sq
i
sd
i
sq
i
sd
i
Δ
sq
i
Δ
d
y
q
y
sd
u
sq
u
∫
ωΔ
isd →r
ψ
r
isq → Te → ω
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 4: Điều khiển định hướng từ thông ĐCKĐB IV.5
s
r
r
ω
θ
= (4.4)
Chuyển đổi hệ tọa độ dòng điện (CTĐi)
i
sα = isa (4.5a)
i
sβ =
()
sbsa i2i
3
1+ (4.5b)
i
sd = isαcosθr + isβsinθr (4.6a)
i
sq = - isαsinθr + isβcosθr (4.6b)
Bộ biến đổi (BBĐ)
o Chuyển đổi hệ tọa độ dòng điện (CTĐi)
u
sα = usdcosθr – usqsinθr (4.7a)
u
sβ = usdsinθr + usqcosθr (4.7b)
o Bộ biến đổi điện áp (bộ điều chế vector không gian)
u
sa = usα (4.8a)
βα +−= sssb u
2
3
u
2
1
u (4.8b)
u
sc = – usa – usb (4.8c)
Khâu điều chế tốc độ quay (ĐCω)
Là khâu hiệu chỉnh PI:
()
ω−ω
⎟
⎠
⎞
⎜
⎝
⎛+=ω ω
ω
*
I
P
*
rs
K
K (4.9)
Các khâu điều chế dòng (DCid và DCiq)
o Khâu điều chế dòng isd (DCid)
sd
Id
Pdd i
s
K
Ky Δ
⎟
⎠
⎞
⎜
⎝
⎛+= (4.10)
o Khâu điều chế dòng isq (DCiq)
sq
Iq
Pqq i
s
K
Ky Δ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+= (4.11)
Chú ý: Xét trong hệ tọa độ từ thông rotor nên 0
rq
=
Ψ
, rdr Ψ=Ψ (4.12)
Các thông số KP và KI trong các bộ điều khiển PI được hiệu chỉnh sao cho hệ
thống đạt tới đáp ứng tốt nhất.
IV.3. Đánh giá đáp ứng của thuật toán điều khiển FOC
Hệ thống ổn định.
Sai số xác lập của tốc độ nhỏ, sai số xác lập của từ thông rotor lớn.
Thời gian đáp ứng của hệ thống tương đối nhanh.
Momen tải không tác động nhiều đến đáp ứng của tốc độ, và đáp ứng của từ
thông rotor.
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)