
Tạp chí Khoa học và Kỹ thuật - ISSN 1859-0209
93
NHẬN DẠNG HỆ SỐ LỰC NÂNG MÁY BAY TRONG GIAI ĐOẠN
CẤT CÁNH SỬ DỤNG MẠNG NƠRON ĐỘT BIẾN VỚI MÔ HÌNH
NƠRON IZHIKEVICH VÀ THUẬT TOÁN HỌC SÂU SPIKEPROP
Nguyễn Văn Tuấn1,*, Trương Đăng Khoa2, Phạm Trung Dũng2
1Hệ Quản lý học viên sau đại học, Trường Đại học Kỹ thuật Lê Quý Đôn
2Viện Tên lửa và Kỹ thuật điều khiển, Trường Đại học Kỹ thuật Lê Quý Đôn
DOI: 10.56651/lqdtu.jst.v18.n02.690
Tóm tắt
Bài báo đề xuất phương pháp nhận dạng hệ số lực nâng của máy bay trong giai đoạn cất
cánh dựa trên dữ liệu ghi lại từ chuyến bay thực tế, sử dụng mạng nơron đột biến (SNN)
theo mô hình nơron Izhikevich và thuật toán lan truyền ngược sai số đột biến (SpikeProp).
Kết quả nhận dạng được so sánh với kết quả khi sử dụng mạng Radial Basic Network
(RBN) và nhận dạng theo mô hình hồi quy phi tuyến (NARX), cho thấy độ chính xác, độ
tin cậy cao hơn và số lần luyện mạng nhỏ hơn. Kết quả nhận được là cơ sở để có thể áp
dụng mạng SNN với các mô hình nơron và tổng hợp thuật toán luyện mạng khác trong
nhận dạng các hệ số khí động của thiết bị bay trong các chế độ cơ động khác nhau.
Từ khóa: Thiết bị bay; mạng nơron đột biến; lan truyền ngược sai số đột biến; mạng RBN;
mô hình NARX.
1. Giới thiệu
Đối với thiết bị bay, các hệ số khí động là một chỉ tiêu hết sức quan trọng, cần
phải đưa ra ngay từ khi đặt yêu cầu thiết kế và được tính toán, kiểm tra, thử nghiệm,
hiệu chỉnh trong toàn bộ quá trình thiết kế và được kiểm soát trong quá trình khai thác
sử dụng thiết bị bay. Đối với máy bay dạng cánh cố định, lực nâng và lực cản được tạo
ra chủ yếu nhờ các cánh; hệ số lực nâng và hệ số lực cản có sự ảnh hưởng lẫn nhau và
được đặc trưng thông qua hệ số chất lượng khí động [1]. Đối với máy bay chiến đấu
tiêm kích đánh chặn dạng cánh cố định, tốc độ leo cao và khả năng cơ động là các tiêu
chí được quan tâm đầu tiên và hệ số lực nâng khí động là một tham số đóng vai trò quan
trọng trong việc đạt được các chỉ tiêu này.
Mô hình và phương pháp nhận dạng đối với hệ số lực nâng của máy bay dạng
cánh cố định theo dữ liệu chuyến bay cũng rất đa dạng, có thể kể đến như: Mô hình
tuyến tính bậc hai với đầu vào là nhiễu quá trình, sử dụng bộ lọc Kalman mở rộng [2],
* Email: tuanteacher.al@gmail.com

Journal of Science and Technique - ISSN 1859-0209
94
bộ lọc Kalman mở rộng cùng với là phẳng Bryson-Frazier (EKF-MBF) [3], mô hình
đa thức với các thành phần là hàm điều hoà đối với góc tấn công, sử dụng phương pháp
tính toán động học dòng chảy (CFD) hai chiều hoặc ba chiều [4]. Đặc biệt, do có tính chất
xấp xỉ tốt, các mô hình phi tuyến mà mạng nơron nhân tạo (ANN) đã được quan tâm và là
một công cụ hiệu quả trong nhận dạng hệ số khí động, dẫn xuất hệ số khí động [5-7].
Trong giai đoạn cất cánh hoặc cơ động chiếm lĩnh độ cao, hệ số lực nâng khí động
thay đổi khá lớn do sự thay đổi nhanh của mật độ không khí, góc tấn công và của tốc độ
góc chúc góc, khi này mô hình biểu diễn hệ số lực nâng phải là mô hình phi tuyến và
việc nhận dạng các tham số của mô hình này là rất khó khăn.
Các nghiên cứu về ứng dụng mạng nơron đột biến SNN trong nhận dạng hệ số khí
động thiết bị bay đã được quan tâm trong những năm gần đây [8, 9] và đã cho thấy
những ưu điểm nhất định về độ chính xác so với việc sử dụng phương pháp nhận dạng
theo mô hình phi tuyến hoặc nhận dạng dựa trên mạng nơron nhân tạo (ANN) sử dụng
các hàm kích hoạt dạng hàm sigmoid hoặc hàm mũ [10, 11].
Để luyện mạng nơron đột biến nhiều lớp, một thuật toán học sâu được thiết kế để
xác định một tập hợp thời điểm kích hoạt mong muốn
d
j
t
của tất cả các nơron đầu ra, cho
một tập hợp mẫu đầu vào nhất định, bằng cách sử dụng một hàm sai số đánh giá, cụ thể là
sai số trung bình bình phương nhỏ nhất để giảm thiểu sai lệch bình phương giữa thời điểm
đầu ra luyện mạng
j
t
và thời điểm đầu ra mong muốn
d
j
t
[12]. Kết quả nhận dạng theo
mô hình mạng nơron đột biến với thuật toán học sâu cho kết quả chính xác hơn so với mô
hình hồi quy phi tuyến NARX, khi phân tích mức độ tương thích giữa đầu ra mô hình
nhận dạng so với mô hình hệ số khí động và phần dư của hai mô hình.
Phần còn lại của bài báo được tổ chức như sau: Phần 2 giới thiệu hệ phương trình
chuyển động dọc trục của máy bay và mô hình hệ số lực nâng. Phần 3 xây dựng mạng
SNN với mô hình nơron Izhikevich và thuật toán nhận dạng SpikeProp. Phần 4 đưa ra kết
quả mô phỏng và thảo luận. Phần 5 kết luận, đánh giá các kết quả nhận được.
2. Chuyển động dọc trục của máy bay và mô hình hệ số lực nâng
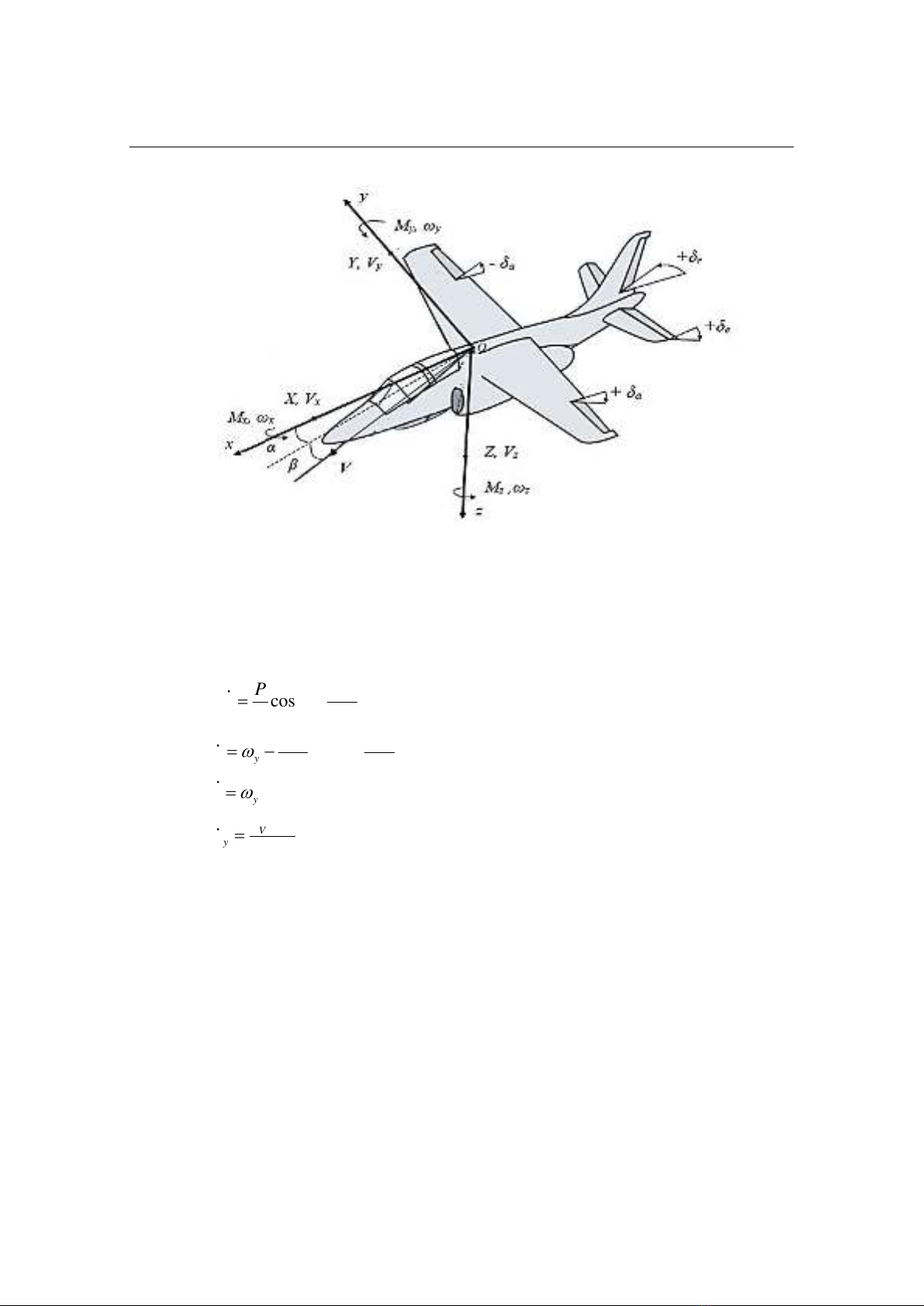
Trong hình 1 [13] biểu diễn hệ tọa độ liên kết của máy bay Oxyz và các ký hiệu:
,
- góc tấn công và góc trượt;
V
- tốc độ máy bay;
,,X Y Z
- các thành phần lực khí
động trong hệ tọa độ liên kết;
,,
x y z
V V V
- tốc độ máy bay trong hệ tọa độ liên kết;
,,
x y z
- tốc độ góc chuyển động máy bay;
,,
x y z
M M M
- mô men khí động trong hệ
tọa độ liên kết;
,,
e r a
- góc quay cánh lái độ cao, cánh lái hướng và cánh lái liệng.
Tạp chí Khoa học và Kỹ thuật - ISSN 1859-0209
95
Hình 1. Hệ tọa độ liên kết của máy bay và các ký hiệu.
Trong giai đoạn cất cánh hoặc chiếm lĩnh độ cao, chuyển động theo kênh dọc trục
và kênh bên của máy bay thường ít có ảnh hưởng chéo nhau và có thể được xem như là
độc lập nhau. Chuyển động theo kênh dọc trục của máy bay khi này được mô tả bằng hệ
phương trình phi tuyến [13]:
cos sin( )
sin cos( )
V
D
V
yL
y
VA
yy
y
qS
P
V C g
mm
qS
PC
mV m
q Sb m
I
(1)
trong đó:
- góc chúc góc;
- góc tấn công;
,
LD
CC
- hệ số lực nâng, hệ số lực cản;
y
m
- hệ số mô men nâng khí động;
y
- tốc độ góc chúc ngóc;
y
I
- mô men quán tính theo
trục
Oy
;
V
q
- áp suất khí động;
A
b
- cung khí động cánh nâng;
S
- diện tích đặc trưng của
cánh nâng;
A
b
- cung khí động trung bình cánh nâng;
m
- khối lượng máy bay.
Các hệ số khí động
,
LD
CC
phụ thuộc vào các tham số khí động như góc tấn công
, tốc độ bay
V
, tốc độ góc chúc ngóc
y
... cũng như các tham số hình học của thân
và cánh máy bay (đường kính thân máy bay, diện tích cánh nâng, profile cánh, góc mũi
tên cánh...).
Journal of Science and Technique - ISSN 1859-0209
96
Các hệ số lực nâng, hệ số lực cản và hệ số mô men trong (1) được xác định trong hệ
tọa độ tốc độ, khi chuyển qua hệ tọa độ liên kết, các hệ số này được xác định như sau [14]:
1
( - )
sin - cos
xx
V
z
z
V
L x z
C ma P
qS
ma
CqS
C C C
- cos - sin
1
D x z
y y y
VA
C C C
mI
q Sb
(2)
Trong thực tế, với chuyển động của máy bay trong giai đoạn cất cánh hoạc chiếm
lĩnh độ cao, với yêu cầu nhanh chóng đạt được độ cao cần thiết nên cánh lái độ cao
thường đặt ở giá trị lớn và không thay đổi, hệ số lực nâng phụ thuộc chủ yếu vào sự
thay đổi góc tấn công và tốc độ góc chúc góc. Mô hình hệ số lực nâng trong giai đoạn
này được xác định [14]:
22
0
2
2
_ _ _ _
__
0 0 0
1( ) 2
2 2 2 2
yy
y
y A y A y A
L L L L L
LL
b b b
C C C C C C C
V V V
(3)
ở đây:
0
L
C
- hệ số lực nâng khi
0
,
0
VV
,
0
y
;
- gia số góc tấn công so
với
0
;
0
- góc tấn công cân bằng, đảm bảo cho máy bay bay với tốc độ
0
V
không
đổi và độ cao ổn định;
A
b
- cung khí động cánh nâng;
y
- tốc độ góc chúc ngóc;
22
_ _ _ _ __
, , , ,
yy y
L L L LL
C C C C C
- dẫn xuất động học (aerodynamic derivatives) của lực
nâng tương ứng với các thành phần tạo nên lực nâng.
Việc xác định hệ số lực nâng tương ứng với các thành phần
,
y
theo (3) là
rất phức tạp do sự biến thiên mạnh của các thành phần này. Trong bài báo này, các tác
giả đề xuất sử dụng xấp xỉ sự phụ thuộc phi tuyến này bởi mạng SNN với mô hình
nơron Izhikevich.
3. Xây dựng mạng SNN với mô hình nơron Izhikevich và thuật toán nhận dạng
3.1. Mô hình nơron đột biến Izhikevich
Mô hình nơron đột biến Izhikevich phụ thuộc vào bốn tham số, có khả năng tái
tạo hành vi đột biến và kích hoạt của các loại nơron thần kinh vỏ não. Mô hình được
biểu diễn bởi hai phương trình vi phân đối với điện thế của lớp màng trước khi đột biến
u
và phục hồi sau khi đột biến
[15]:
Tạp chí Khoa học và Kỹ thuật - ISSN 1859-0209
97
2
0.04 5 140
()
du u u I
dt
da bu
dt
(4)
(5)
trong đó, I - dòng điện synap đưa đến lớp màng.
Với việc đặt lại giá trị đột biến phụ trợ, được biểu thị bằng phương trình:
Nếu
30u
(miliVolt)
thì
uc
d
(6)
Các tham số
a
,
b
,
c
,
d
đặc trưng cho tính chất tăng trưởng của
u
và khả năng phục
hồi của
và được xác định cụ thể trong [15].
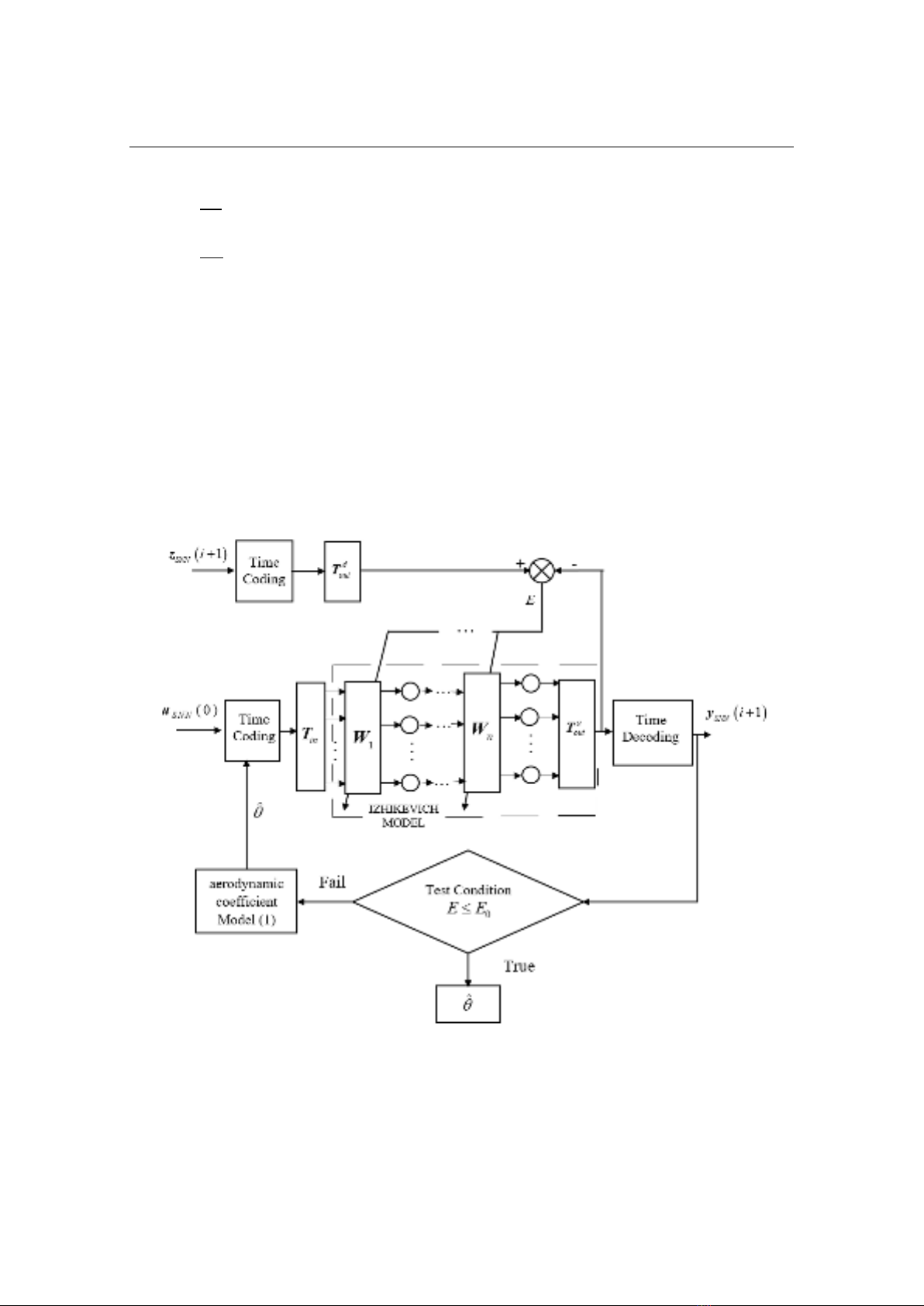
Cấu trúc SNN theo mô hình nơron Izhikevich được sử dụng để nhận dạng hệ số
lực nâng máy bay được thể hiện trong hình 2 [8].
Hình 2. Cấu trúc SNN theo mô hình nơron Izhikevich nhận dạng hệ số lực nâng.
Công thức mã hóa các biến đầu vào thành thời điểm đột biến và giải mã các chuỗi
đột biến đầu ra thành tín hiệu tương tự như trong [8]:
![Thiết kế kỹ thuật máy ép [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151217/nvhbinh2011/135x160/112535267.jpg)














![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)