
M c l cụ ụ
Ph n I : Thi t ầ ế l pậ h tr c t a đ khi phay lăn ệ ụ ọ ộ
răng..............................................................2
1.1 T ng quan v dao phay lăn răng.........................................................................2ổ ề
1.2 Thi t l p h tr c t a đ khi phay lăn ế ậ ệ ụ ọ ộ
răng..........................................................3
Ph n II : Thi t l p chuy n đi t a ầ ế ậ ể ổ ọ
đ..................................................................................4ộ
Ph n III : Tìm ph ng trình b m t kh i th y cho đi t ng ầ ươ ề ặ ở ủ ố ượ
2.........................................7
Ph n IV : Xác đnh b m t kh i th y b ng ph ng pháp đng ầ ị ề ặ ở ủ ằ ươ ộ
h c...................................9ọ
Ph n V : ng d ng Ten-x quay trong chuy n đi t a ầ Ứ ụ ơ ể ổ ọ
đ................................................11ộ
Ph n VI : Xác đnh đ cong m t, đng ti p xúc, kích th c khi phay lăn ầ ị ộ ặ ườ ế ướ
răng..............13
HN891 Page 1
Ph n I : Thi t l p h tr c t a đ khiầ ế ậ ệ ụ ọ ộ
phay lăn răng
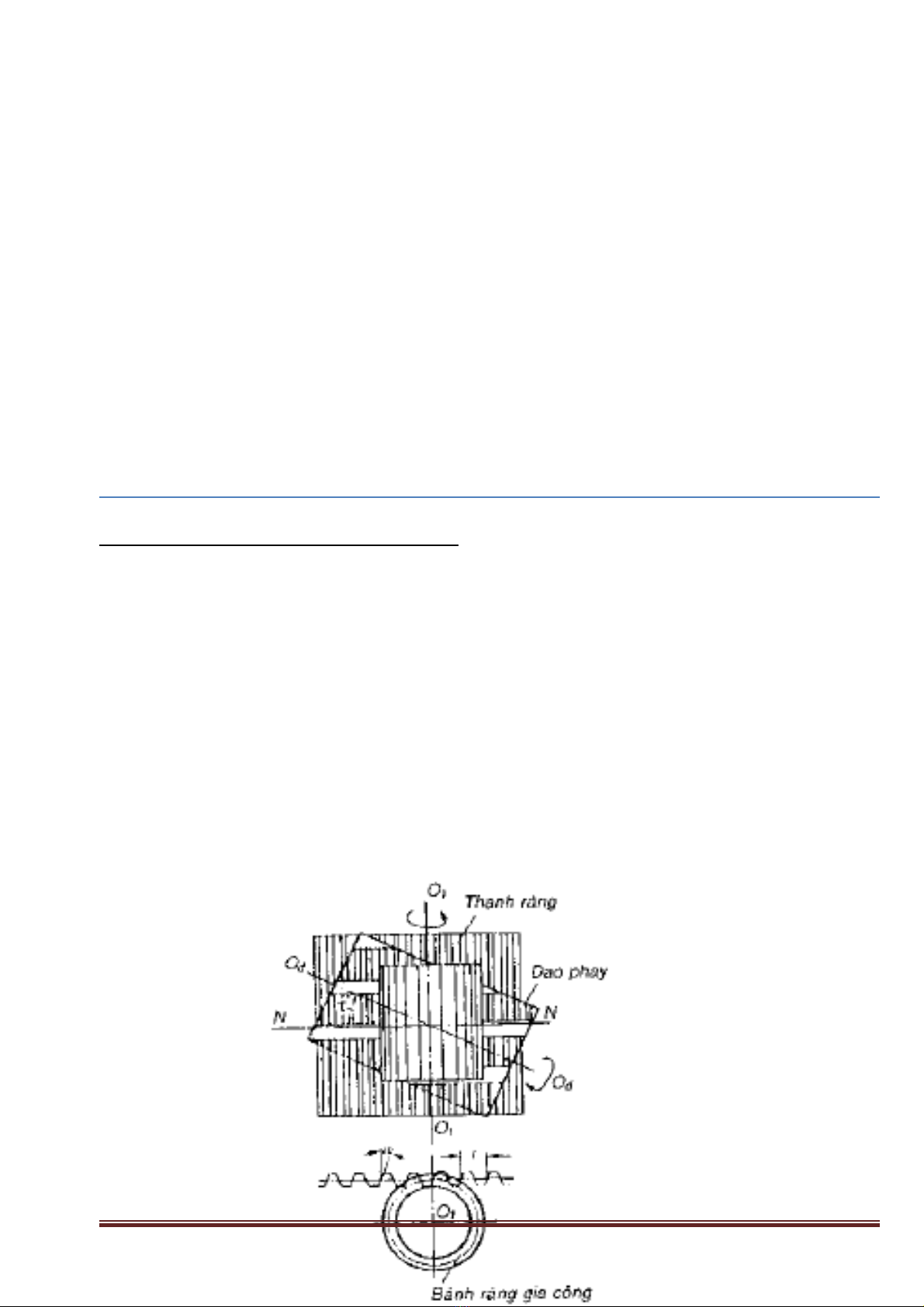
1.1 T ng quan v dao phay lăn răng :ổ ề
Dao phay lăn răng làm vi c theo nguyên lý bao hình có tâm tích. Quá trình hìnhệ
thành profin răng bánh răng b ng dao phay lăn răng t ng t nh quá trình ăn kh pằ ươ ự ư ớ
gi a bánh răng gia công v i tr c vít.Chuy n đng quay c a dao phay lăn răng (tr c vít)ữ ớ ụ ể ộ ủ ụ
quanh tr c c a nó và chuy n đng quay c a phôi bánh răng quanh tr c c a phôi v iụ ủ ể ộ ủ ụ ủ ớ
quan h nh sau: Tr c vít ( dao phay lăn răng ) quay m t vòng thì phôi bánh răng quayệ ư ụ ộ
1/Z1 vòng (Z1 là s răng c a bánh răng c n gia công). Chuy n đng quay c a daoố ủ ầ ể ộ ủ
quanh tr c c a nó đng th i là chuy n đng c t chính. Dao phay lăn răng là m t tr cụ ủ ồ ờ ể ộ ắ ộ ụ
vít có x rãnh d c (th ng là rãnh xo n ) t o thành m t tr c có góc tr c = 0 vàγẻ ọ ườ ắ ạ ặ ướ ướ
rãnh thoát phoi, h t l ng đ t o góc sau.ớ ư ể ạ
HN891 Page 2
1.2 Thi t l p h tr c t a đ khi phay lăn răng:ế ậ ệ ụ ọ ộ
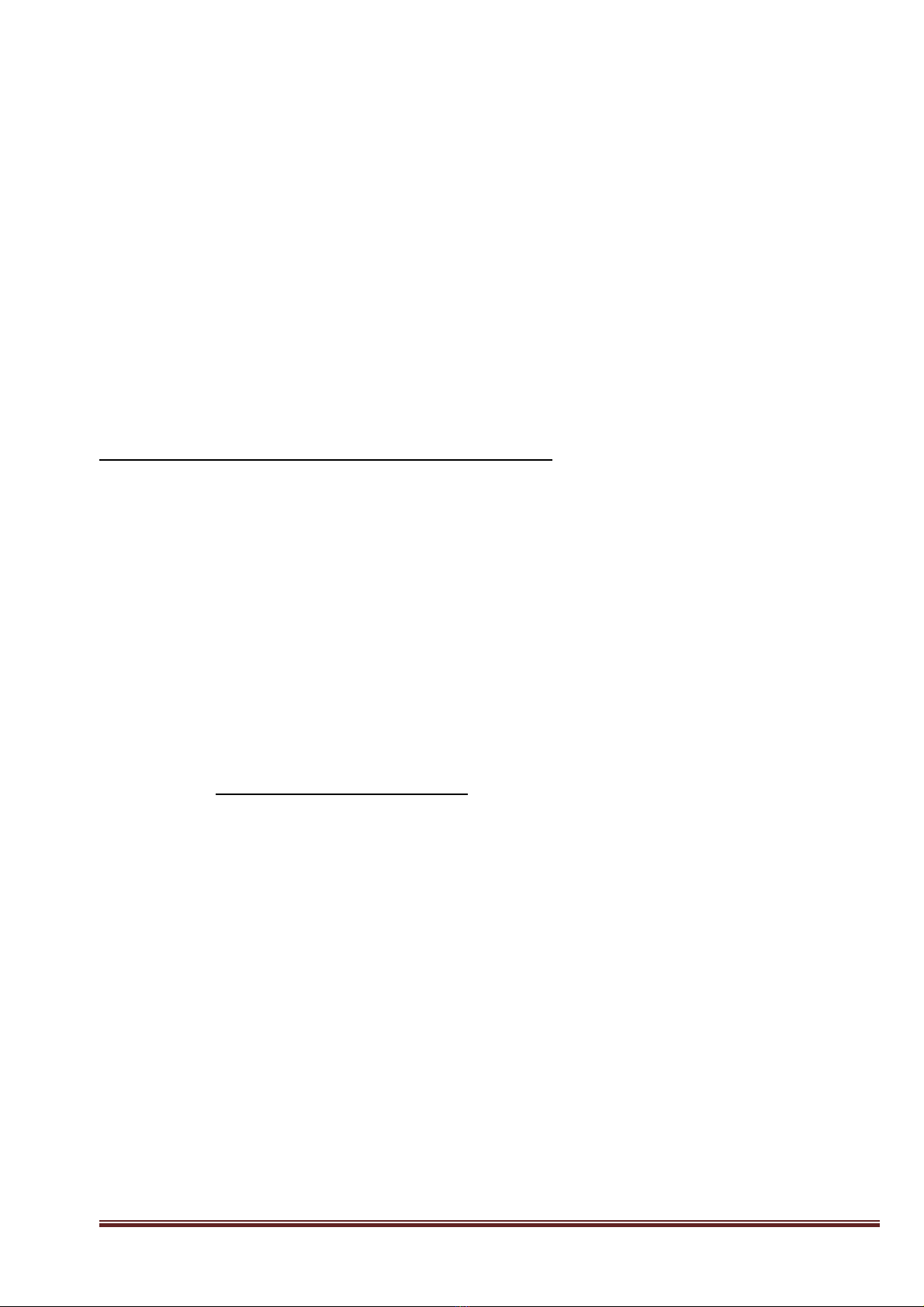
- S dùng 3 h t a đ chính sau:ẽ ệ ọ ộ
- H t a đ Sệ ọ ộ 2 (O2, X2 , Y2 , Z2 ) g n vào bánh răng.ắ
- H t a đ Sệ ọ ộ 1 ( O1, X1, Y1, Z1) đc g n vào thanh răng hay dao ượ ắ phay
lăn răng.
- H t a đ Sệ ọ ộ 0 ( O, X, Y,Z) là h t a đ c đnh. ệ ọ ộ ố ị
Tr c Zụ1 c a h di đng Sủ ệ ộ 1 đc đt trùng v i tr c c a dao phay lăn răng. Tr c Zượ ặ ớ ụ ủ ụ 2 c a ủ
h di đng Sệ ộ 2 đc đt trùng v i tr c c a dao phay lăn răng.ượ ặ ớ ụ ủ
H t a đ áp d ng nh sau:ệ ọ ộ ụ ư
HN891 Page 3
Hình 1: H t a đ áp d ngệ ọ ộ ụ
Ph n II : Thi t l p chuy n đi t a đầ ế ậ ể ổ ọ ộ
Chuy n t h Sể ử ệ 0 ( O, X, Y,Z) đn h Sế ệ 2 (O2, X2 , Y2 , Z2 ): đc th c hi n b i ượ ự ệ ở
hai b c:ướ
- D ch chuy n g c t a đ O đn Oị ể ố ọ ộ ế 2 , quay h t a đ quanh tr c X m t góc ( làγệ ọ ộ ụ ộ
góc gi a hai tr c quay c a b truy n ) sao cho tr c Z đn trùng v i tr c Zữ ụ ủ ộ ề ụ ế ớ ụ p. Ta nh nậ
đc h t a đ trung gian Sượ ệ ọ ộ p (Op, Xp , Yp , Zp ).
- Quay h Sệp quanh Zp m t góc ộ2 nh n đc h Sậ ượ ệ 2 (O2, X2 , Y2 , Z2 ) h g n li nệ ắ ề
v i bánh răng.ớ
HN891 Page 4

Trên hình 1 bi u di n tr ng h p khi quan sát t h ng d ng c a tr c Zể ễ ườ ợ ừ ướ ươ ủ ụ 1 và
Z2, các khâu 1 và 2 quay ng c chi u kim đng h . ượ ề ồ ồ
ng d ng công th c : Ứ ụ ứ M21.r1
Trong đó : r1, r2 là mà tr n c t c a các bán kính vector và c a cùng m t đi mậ ộ ủ ủ ộ ể
trong h Sệ1 và S2.
M01 là ma tr n chuy n đi t h t a đ Sậ ể ổ ừ ệ ọ ộ 1 sang S0.
Mp0 là ma tr n chuy n đi t h t a đ Sậ ể ổ ừ ệ ọ ộ 0 sang Sp.
M2p là ma tr n chuy n đi t h t a đ Sậ ể ổ ừ ệ ọ ộ p sang S2.
M21 là k t qu s chuy n đi gian ti p t h t a đ Sế ả ự ể ổ ế ừ ệ ọ ộ 1 sang S2.
Ta có:
M01 =
Mp0 =
M2p =
Ma tr n Mậ20 khi chuy n t h t a đ Sể ừ ệ ọ ộ 0 sang S2:
M20 = M2p. Mp0 =
V y : ậMa tr n Mậ21 khi chuy n t h t a đ Sể ừ ệ ọ ộ 1 sang S2:
M21 = M2p. Mp0 .M01 =
Bi u th c liên h gi a xể ứ ệ ữ 1, y1, z1 và x2, y2, z2 b ng các ph ng trình:ằ ươ
Chuy n đi ng c t Sể ổ ượ ừ 2 sang S1 :
T ng t nh trên : ươ ự ư
Trong đó M12 là ma tr n ngh ch đo c a ma tr n Mậ ị ả ủ ậ 21 đc xác đnh b i:ượ ị ở
HN891 Page 5

![Thiết kế kỹ thuật máy ép [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151217/nvhbinh2011/135x160/112535267.jpg)













![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)