
Vi t cho các B n m i làm quen v i ic vi đi u khi n, h AT89C51, ic làm vi c theo ế ạ ớ ớ ề ể ọ ệ
câu l nh.ệ
IC vi đi u khi n là gì?ề ể
Tr c h t hãy làm quen v i khái ni m đi u khi n trong ngành đi n t . Đi u khi n là dùngướ ế ớ ệ ề ể ệ ử ề ể
m c áp caoứ hay th p đ đóng m m t thi t b . B n xem thí d sau:ấ ể ở ộ ế ị ạ ụ
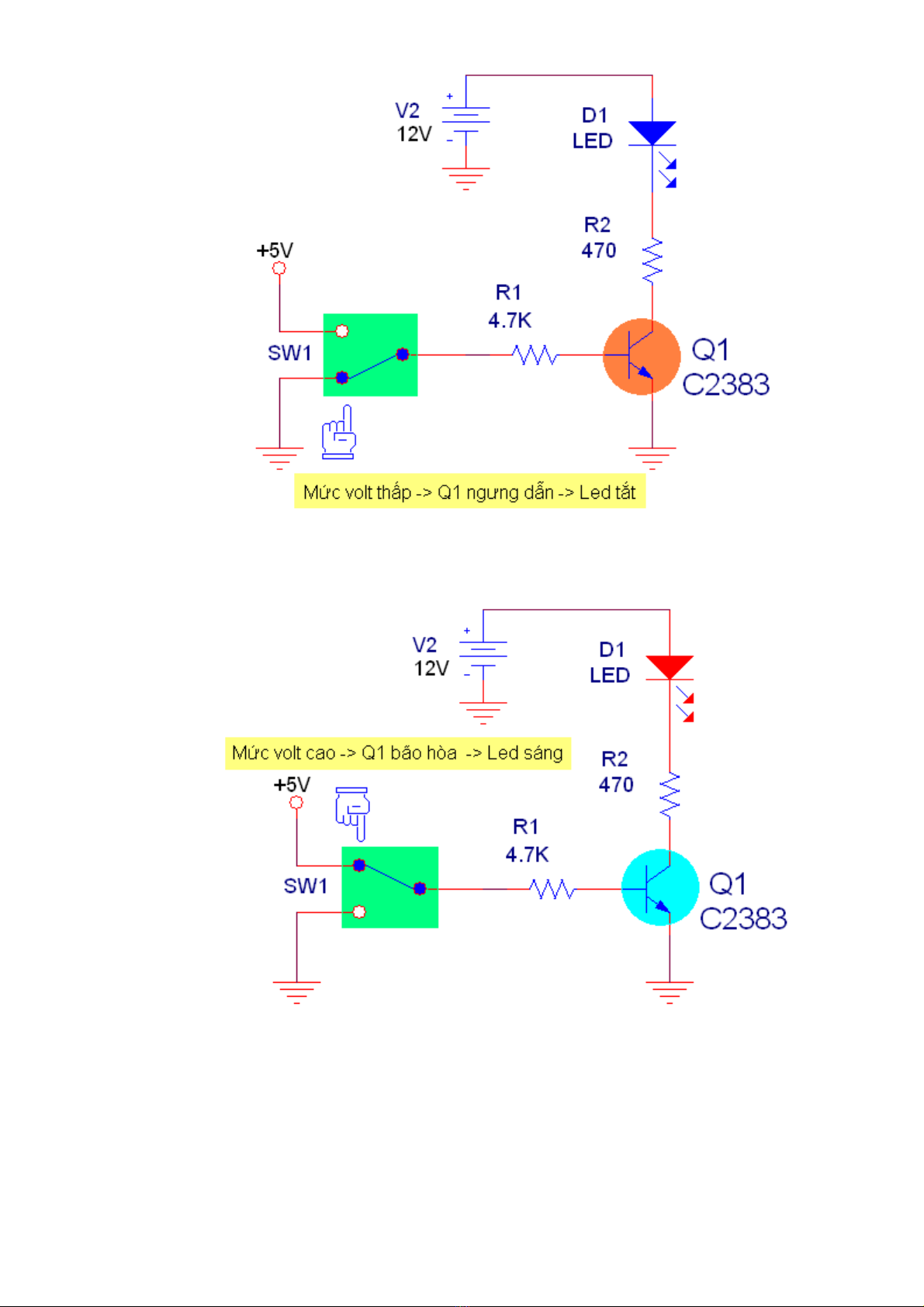
Trong hình này, B n th y khi chân B c a transistor Q1 cho đt m c volt th p, thìạ ấ ủ ặ ở ứ ấ
transistor tr ng thái ng ng d n và không có dòng c p cho Led. Led s t t.ở ạ ư ẫ ấ ẽ ắ
Trong hình này, B n th y khi chân B c a transistor Q1 cho đt m c volt cao thìạ ấ ủ ặ ở ứ
transistor tr ng thái bão hòa và có dòng c p cho Led. Led s sáng.ở ạ ấ ẽ
V i hình đng chúng ta th y rõ h n tác nhân đi u khi n, t c bit 0 hay bit 1 trên chân B,ớ ộ ấ ơ ề ể ứ
làm Led lúc t t lúc sáng. B n xem hình.ắ ạ

Qua hai hình này có th th y, chúng ta có th dùng m c volt cao th p đ t t m m tể ấ ể ứ ấ ể ắ ở ộ
thi t b , đây là t t m Led. Chúng ta t m ch p nh n đnh nghĩa sau:ế ị ở ắ ở ạ ấ ậ ị
* M c volt th p là bit 0.ứ ấ
* M c volt cao là bit 1.ứ
V y có th nói đ cho Led sáng, chúng ta dùng bit 1 và làm cho Led t t chúng ta dùng bitậ ể ể ắ
0. Trong tác đng đi u khi n đóng m , chúng ta có th đóng m m t Relay, đóng mộ ề ể ở ể ở ộ ở
đi n cho m t motor DC. ệ ộ B n xem hình:ạ

Trong hình này, trên chân C c a transistor Q1, chúng ta th y có:ủ ấ
* Led chi u sáng.ế
* Relay 12V v i ti p đi m lá kim K1.ớ ế ể
* Motor DC 12V
V y n u đt bit 1 trên chân B các thi t b trên chân C c a Q1 s đc c p dòng và n uậ ế ặ ế ị ủ ẽ ượ ấ ế
dùng bit 0 trên chân B thì các thi t b trên chân C s b c t dòng. Qua các thí d trên,ế ị ẽ ị ắ ụ
chúng ta th y n u có m t linh ki n đi n t có th xu t ra m c volt cao hay m c volt th pấ ế ộ ệ ệ ử ể ấ ứ ứ ấ
theo câu l nh do chúng ta so n ra thì lúc đó chúng ta đã có th đi u khi n các thi t bệ ạ ể ề ể ế ị
b ng câu l nh. IC vi đi u khi n có các c ng (port), các chân c a c ng có th xu t nh pằ ệ ề ể ả ở ủ ả ể ấ ậ
m c áp cao hay th p tùy theo các câu l nh do chúng ta so n ra, do đó n u dùng ic viứ ấ ệ ạ ế
đi u khi n chúng ta s có th đi u khi n nhi u thi t b theo câu l nh.ề ể ẽ ể ề ể ề ế ị ệ
Hình v sau đây cho th y 4 c ng c a ic vi đi u khi n AT89C51.ẽ ấ ả ủ ề ể

B n bi t m c volt trên các chân c a m i c ng B n đu có th ch n đnh m c volt caoạ ế ứ ủ ỗ ả ạ ề ể ọ ị ở ứ
hay m c volt th p b ng câu l nh.ứ ấ ằ ệ
L nh đt chân lên m c volt cao là setb (set bit). L nh đt chân xu ng m c volt th p là clrệ ặ ứ ệ ặ ố ứ ấ
(Clear bit).
Thí d : B n mu n chân p1.0 (chân s 1)ụ ạ ố ố lên m c volt cao, B n gõ câu l nh nh sau:ứ ạ ệ ư
setb p1.0
B n mu n chân p1.1 (chân s 2) xu ng m c volt th p. B n gõ câu l nh nh sau:ạ ố ố ố ứ ấ ạ ệ ư
clr p1.1
Qua ph n trình bày trên, tôi nghĩ B n đã hi u đi u khi n các thi t b b ng câu l nh là gì?ầ ạ ể ề ể ế ị ằ ệ
và nó làm vi c ra sao?ệ
Hãy xem hình sau:


![Tài liệu học tập Vi điều khiển ứng dụng trong đo lường và điều khiển [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210705/lovebychance06/135x160/7771625534375.jpg)























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)