1
GIỚI THIỆU
1. Lý do chọn đề tài
Trong một vài năm trở lại đây, thông tin dưới nước đang được sử dụng rất
rộng rãi trong các lĩnh vực như: thám hiểm đại dương, quan trắc địa hình dưới
biển, vận hành và truyền thông tin giữa các tàu ngầm và đặc biệt có vai trò
quan trọng trông lĩnh vực quân sự, an ninh quốc phòng. Do vậy, thông tin
dưới nước đang trở thành một trong những lĩnh vực được nhiều nhà nghiên
cứu quan tâm hiện nay.
Kỹ thuật điều chế phân chia theo tần số trực giao - OFDM có hiệu quả
sử dụng phổ cao, khả năng chống giao thoa đa đường tốt và rất dễ dàng loại
bỏ nhiễu. Sử dụng sóng âm kết hợp với kỹ thuật OFDM và các thuật toán
xử lý tín hiệu có thể hạn chế được ảnh hưởng của nhiễu, đồng bộ giữa bên
phát và bên thu để giải mã chính xác tín hiệu trong môi trường truyền thông
dưới nước.
Môi trường thủy âm có rất nhiều yếu tố ảnh hưởng đến chất lượng tín hiệu,
trong đó có yếu tố dịch chuyển giữa bên phát và bên thu gây ra hiệu ứng Doppler, vì
vậy luận án cũng tập trung vào việc đề xuất các phương pháp bù dịch tần
Doppler mới để giải mã chính xác tín hiệu bên thu và tận dụng tốt băng thông
truyền dẫn.
2. Tình hình nghiên cứu trong và ngoài nước
Thông tin dưới nước đang trở thành một trong những vấn đề được nhiều nhà
nghiên cứu quan tâm hiện nay. Việc truyền tin dưới nước gặp nhiều khó khăn
do tốc độ truyền sóng âm rất chậm (1,5 Km/s) so với tốc độ truyền tín hiệu
sóng vô tuyến trong chân không (300.000 Km/s) nên băng thông truyền tín
hiệu trong nước là rất nhỏ chỉ cỡ vài chục Khz. Ngoài ra do suy hao lớn và
nhiễu mạnh do ảnh hưởng của nhiều yếu tố như môi trường, sóng, gió và các
phương tiện giao thông đường thủy, …. nên khoảng cách truyền tin cũng bị
hạn chế rất nhiều chỉ một vài km. Vì vậy, các nghiên cứu hiện nay thường tập
trung vào việc xử lý đồng bộ, loại bỏ nhiễu, bù dịch tần Doppler khi có sự dịch
chuyển tương đối giữa bên phát và bên thu, cải thiện chất lượng của tín hiệu
sau khi được giải mã.
3. Mục tiêu của luận án
Luận án tập trung vào các vấn đề sau:
• Nghiên cứu thuật toán để đồng bộ thời gian cho tín hiệu OFDM trong môi
trường truyền tin dưới nước.
• Nghiên cứu phương pháp bù dịch tần Doppler sử dụng chuỗi tín hiệu
hình Sin với các ưu điểm so với các phương pháp hiện nay.

2
• Đề xuất một phương pháp bù dịch tần Doppler hoàn toàn mới, sử dụng
một tần số sóng mang tín hiệu dẫn đường CFP để tính toán và bù dịch tần
Doppler.
• Nghiên cứu cải tiến và đưa ra phương pháp giải mã trực tiếp (Direct
Decoder) sử dụng kết hợp CFP để bù dịch tần Doppler.
• Đề xuất mô hình hệ thống MIMO-OFDM sử dụng kỹ thuật mã hóa
không gian thời gian mà chỉ sử dụng 1 cặp anten thu phát ở trên. Đưa ra
thuật toán lựa chọn tín hiệu thu sử dụng thuật toán giải mã tối ưu tín hiệu
của N khung tín hiệu OFDM nhận được nhằm tối ưu hóa quá trình giải
mã tín hiệu và tăng hiệu quả của quá trình truyền tin.
4. Động lực nghiên cứu:
Việc kết hợp giữa Kỹ thuật OFDM với đặc tính phân tập không gian-thời
gian được sử dụng rất rộng rãi trong mọi lĩnh vực truyền thông hiện nay. Hệ
thống thủy âm sử dụng kết hợp hai kỹ thuật này để cải thiện chất lượng tín
hiệu là rất phù hợp. Tuy nhiên, do đặc điểm môi trường dưới nước có rất
nhiều yếu tố ảnh hưởng đến truyền dẫn nên có rất nhiều nghiên cứu và công
bố khoa học tập trung vào các vấn đề như : đồng bộ hệ thống, bù dịch tần
Doppler, loại bỏ nhiễu ICI, cải thiện chất lượng tín hiệu,… Vì vậy, nội dung
của luận án sẽ đề xuất các phương pháp, thuật toán mới kết hợp với thực
nghiệm để so sánh với kết quả ưu điểm hơn so với các nghiên cứu trước đó.
5. Đóng góp của luận án:
Luận án có các đóng góp mới như sau:
• Đề xuất thuật toán về đồng bộ thời gian sử dụng chuỗi bảo vệ GI cho hệ
thống OFDM dưới nước.
• Đề xuất phương pháp bù dịch tần Doppler không sử dụng các ký tự đặc
biệt mà dùng tần số sóng mang pilot CFP (Nội dung này được cấp Bằng
sáng chế của Cục sở hữu trí tuệ- Bộ Khoa học và Công nghệ). Đưa ra
phương pháp mới về giải mã trực tiếp sử dụng CFP để bù dịch tần
Doppler cho hệ thống dưới nước.
• Cải thiện chất lượng tín hiệu thủy âm sử dụng kết hợp kỹ thuật OFDM và
đặc tính phân tập không gian-thời gian. Phương pháp đề xuất truyền tín
hiệu thủy âm từ một anten thu phát, tín hiệu truyền đi được lặp lại
nhiều lần tùy thuộc vào chất lượng kênh truyền. Đưa ra thuật toán lựa
chọn tín hiệu nhằm tối ưu hóa quá trình giải mã tín hiệu và tăng hiệu quả
của quá trình truyền tin.

3
6. Bố cục của luận án
Nội dung của luận án chia làm 4 chương:
Chương 1. Trình bày các đặc tính của kênh truyền thông tin dưới nước và
ứng dụng kỹ thuật OFDM cho hệ thống thủy âm và so sánh ưu-nhược điểm của
hệ thống OFDMA và SC-FDMA.
Chương 2. Đề cập đến đồng bộ thời gian trong hệ thống OFDM, qua đó đề
xuất phương pháp đồng bộ thời gian mới bằng cách phát hiện vị trí của khoảng
bảo vệ (GI).
Chương 3. Trình bày các kỹ thuật bù dịch tần Doppler cho hệ thống OFDM
truyền thông dưới nước, đề xuất phương pháp mới về bù dịch tần Doppler dựa
trên chuỗi tín hiệu hình sin. Tiếp theo, đề xuất phương pháp bù dịch tần
Doppler sử dụng tín hiệu sóng mang dẫn đường CFP (Carrier Frequency
Pilot). Cuối cùng là phương pháp giải mã trực tiếp tín hiệu (A Direct
Decoder).
Chương 4. Trình bày về hệ thống MIMO và đặc tính phân tập của hệ thống.
Sau đó, đề xuất áp dụng kỹ thuật phân tập không gian thời gian cho hệ thống
truyền thông dưới nước nhưng chỉ sử dụng một cặp anten thu phát (SISO).
CHƯƠNG 1 TNG QUAN V HỆ THNG THÔNG TIN DƯỚI NƯỚC
Chương này giới thiệu về hệ thống thông tin dưới nước sử dụng sóng âm.
Do môi trường dưới nước có nhiều yếu tố phức tạp ảnh hưởng đến tín hiệu
nên việc sử dụng kỹ thuật điều chế OFDM là cần thiết. Tiến hành thực nghiệm
và so sánh kết quả với hệ thống sử dụng kỹ thuật SC-FDMA cho thấy ưu điểm
của hệ thống OFDMA là vượt trội.
1.1. Đặt vấn đề
Một số công nghệ truyền tin mới được ứng dụng trong truyền thông
dưới nước như OFDM [6] được ứng dụng do khả năng sử dụng hiệu quả
băng tần và đặc biệt là khả năng chống nhiễu đa đường tốt. Tuy nhiên, kỹ
thuật OFDM có nhược điểm là có PAPR cao nên ảnh hướng đến khả năng
hoạt động của bộ khuếch đại công suất từ đó làm giảm đáng kế khoảng
cách truyền tin. Việc giảm PAPR có nhiều giải pháp [4] mà trong đó sử
dụng kỹ thuật SC-FDMA là một giải pháp đáng quan tâm. SC-FDMA [7] là
kỹ thuật được sử dụng trong đường xuống mạng LTE (4G) [8].
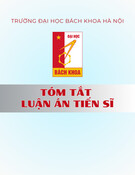
Sơ đồ kênh truyền dẫn thủy âm sử dụng phương thức điều chế OFDMA
và SC-FDMA
4
Hình 1.10. Sơ đồ so sánh hệ thống sử dụng kỹ thuật OFDMA và SC-
FDMA [5]
1.2. Kết quả mô phỏng
Thực hiện với hai trường hợp. thứ nhất là kênh Gauss và thứ hai là
kênh Rayleigh. Thông số mô phỏng là NFFT=2048, GI=1024
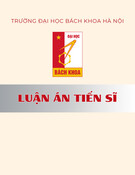
Hình 1.12. Kết quả mô phỏng và lý thuyết trong trường hợp điều chế BPSK,
NFFT=2048, GI=1024, với kênh Rayleigh nTap=10
Nhận xét: với giá trị SNR thấp, điều chế SC-FDMA cho chất lượng tín hiệu
không tốt bằng OFDM.
Kết quả trong trường hợp có cắt bỏ PAPR.
510 15 20 25 30 35
10-5
10-4
10-3
10-2
10-1
100
Eb/No, dB
Bit Error Rate
BER for BPSK using OFDM and SC-FDMA in a 10-tap Rayleigh channel
Rayleigh-Theory
Rayleigh-Simulation
SC-FDMA
5
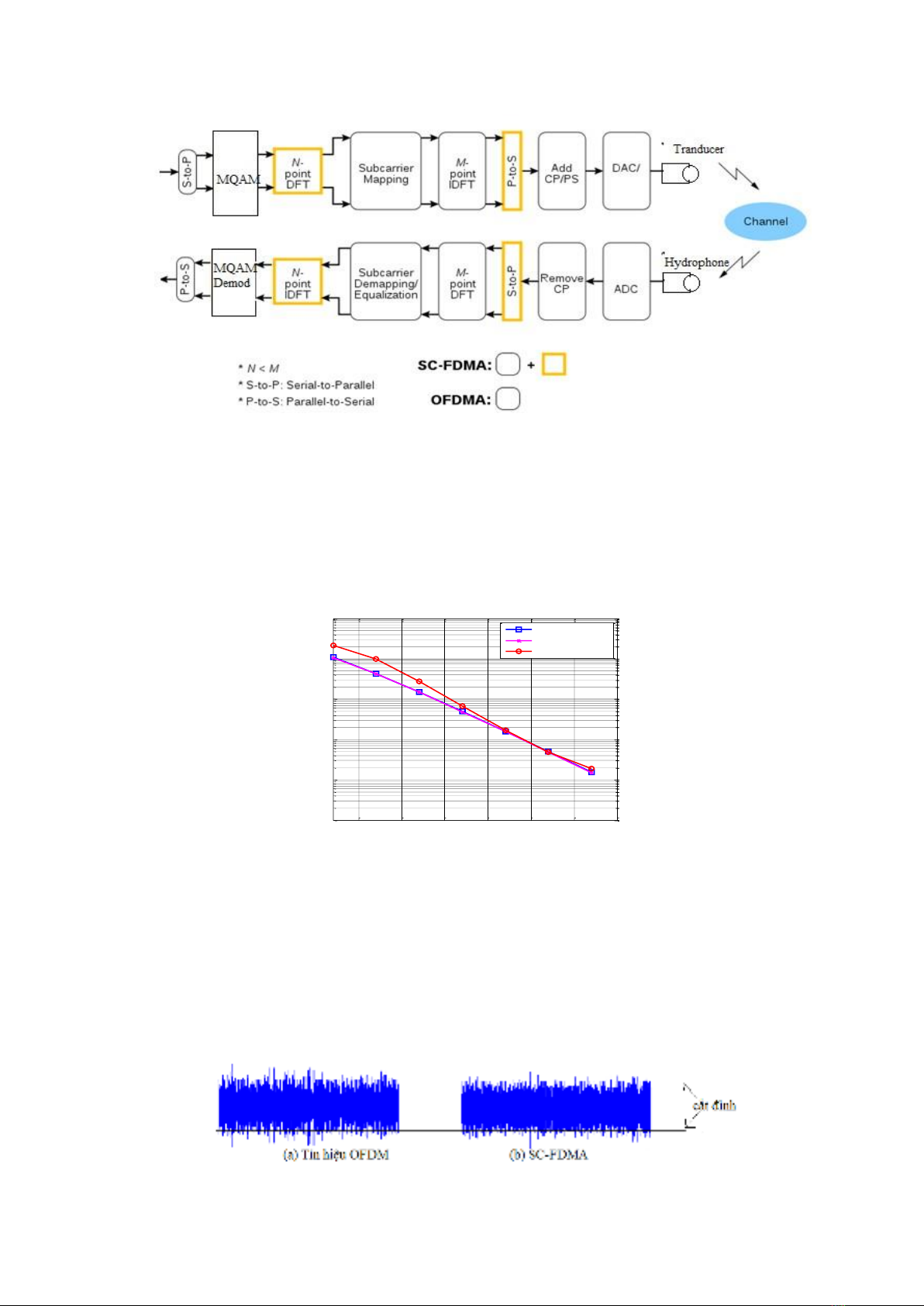
Hình1.13: Dạng tín hiệu OFDM và SC-FDMA bị cắt đỉnh khi vượt ngưỡng
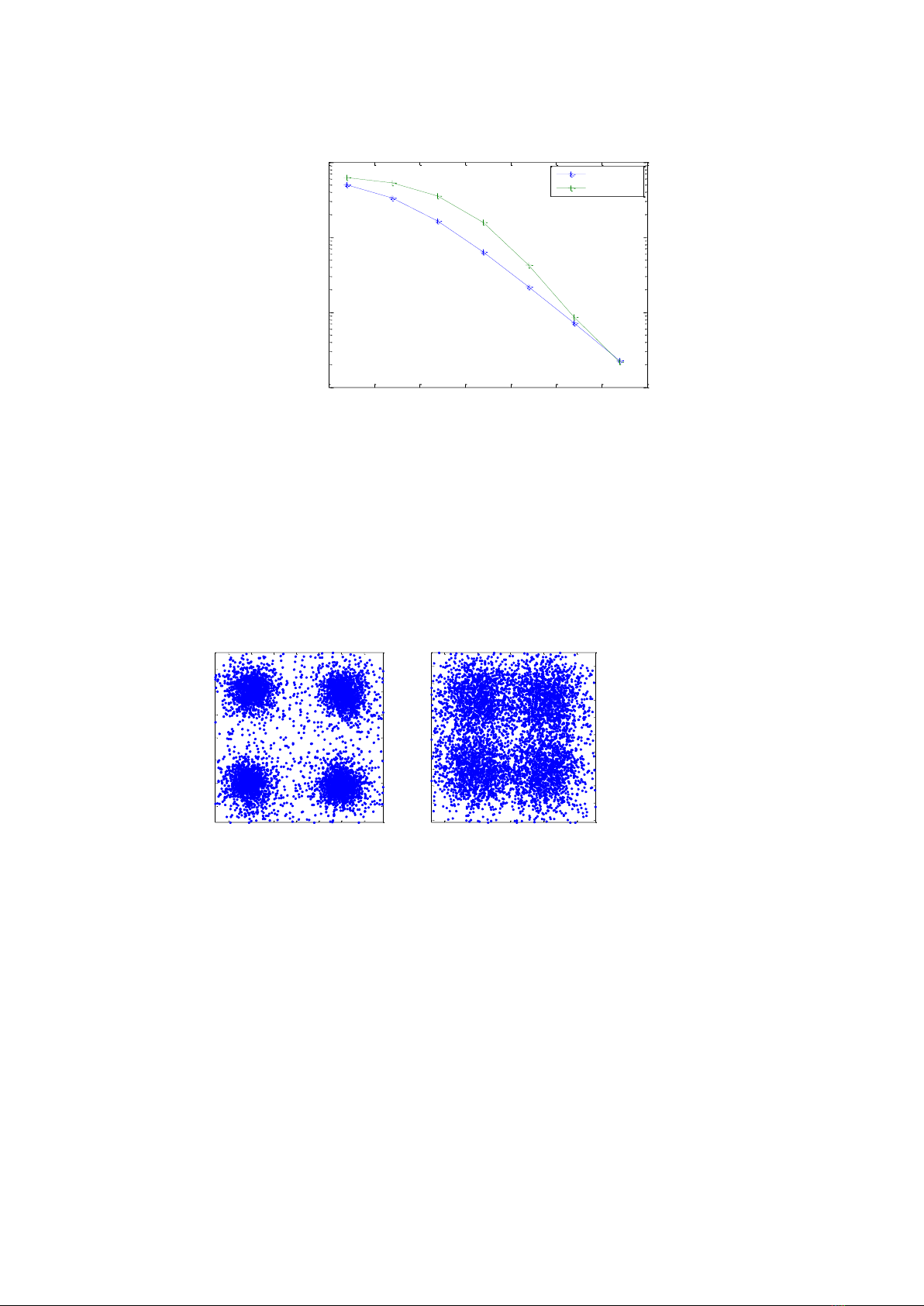
Hình 1.14: So sánh kết quả mô phỏng
1.3. Kết quả thực nghiệm
Hệ thống được thực nghiệm tại hồ Tiền ĐHBK Hà nội. Khoảng cách
giữa phát thu là 100m, tín hiệu được phát đảm bảo công suất là như nhau và
vị trí của các transducer là không thay đổi. Các thông số điều chế:
NFFT=2048, GI=1024, dải tần fmin=12 KHz; fmax= 15KHz, điều chế
QPSK.
Hình 1.15. a. Chòm sao OFDMA thu được SER=0.048
b. Chòm sao SC-FDMA SER=0.103
Việc truyền tin dưới nước sử dụng điều chế OFDMA và SC-FDMA là
hoàn toàn khả thi. Tuy nhiên mặc dù SC-FDMA có lợi hơn OFDMA về tỷ số
PAPR nhưng với cùng các thông số điều chế như nhau cả về lý thuyết, mô
phỏng và thực tế khi áp dụng trong môi trường truyền thông dưới nước thì trong
cả hai trường hợp tín hiệu có cắt PAPR và không cắt PAPR thì hệ thống SC-
FDMA đều cho chất lượng tín hiệu thu được kém hơn so với hệ thống OFDM.
1.4. Kết luận chương
Trong chương này luận án đã trình bày chi tiết về kỹ thuật OFDM, đồng
thời cũng phân tích các ưu - nhược điểm cũng như các vấn đề kỹ thuật ảnh
hưởng đến chỉ tiêu chất lượng hệ thống sử dụng kỹ thuật OFDM. Từ đó ta có
0510 15 20 25 30 35
10-3
10-2
10-1
100
SER
SNR in dB
OFDM
SCFDMA
-1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
Quadrature
In-Phase
Scatter plot
-2 -1 012
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Quadrature
In-Phase
Scatter plot