1
Ch ng 3ươ
Đi U KHI N VÒNG KÍN Đ NG C DCỀ Ể Ộ Ơ
2
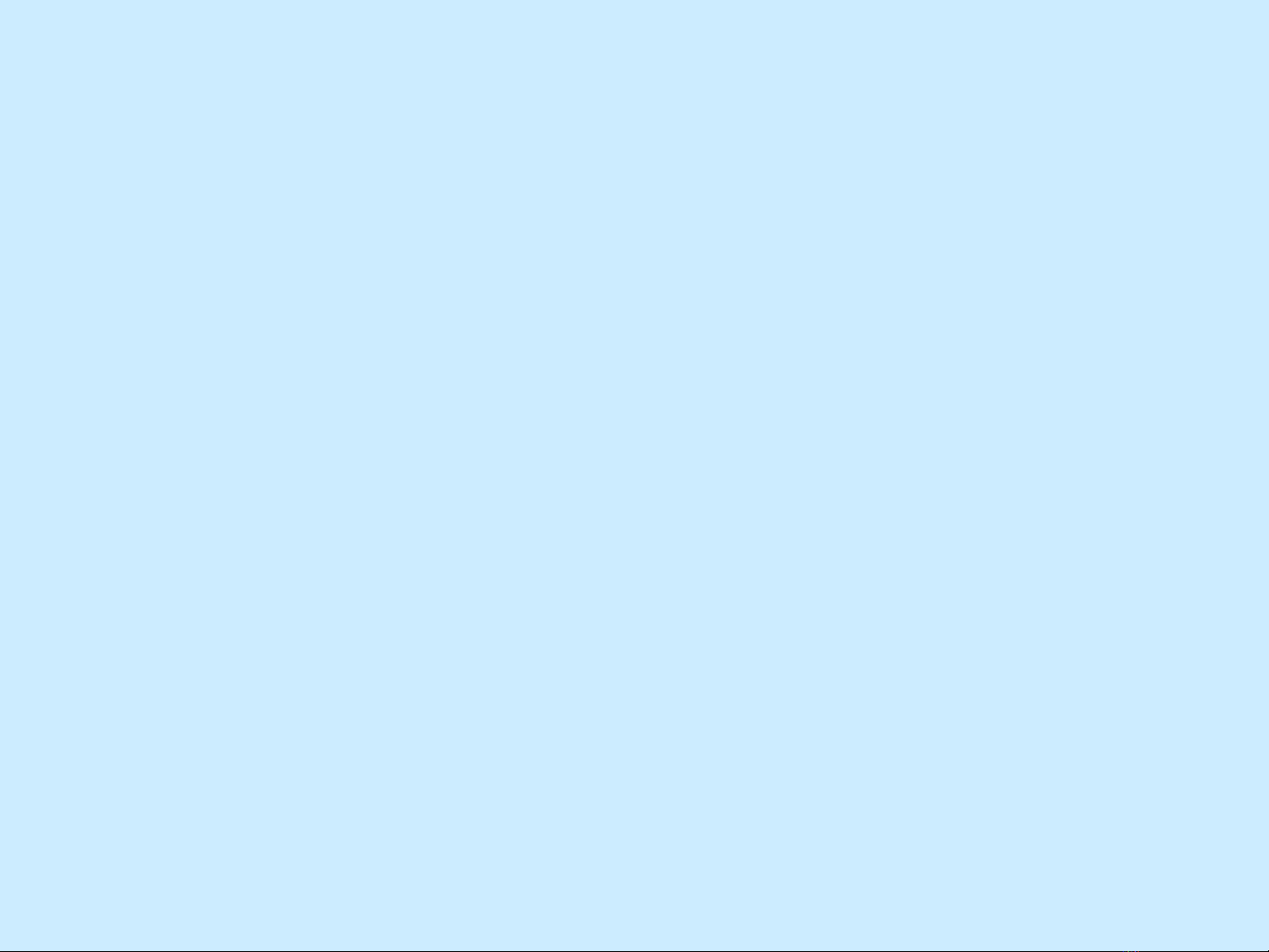
H th ng đi u khi n vòng kín đ ng c m t chi uệ ố ề ể ộ ơ ộ ề
B bi n đ iộ ế ổ
+
-
M ch ạ
kích
Khâu hi u ệ
ch nhỉ
Khâu hi u ệ
ch nhỉ
M ch l cạ ọ
M ch l cạ ọ
+ +
--
ω
∗
ω
V
I
i
ư
Máy phát t cố
Đ ng ộ
cơ
C m bi n dòngả ế
Ngu nồ
V
đk
3
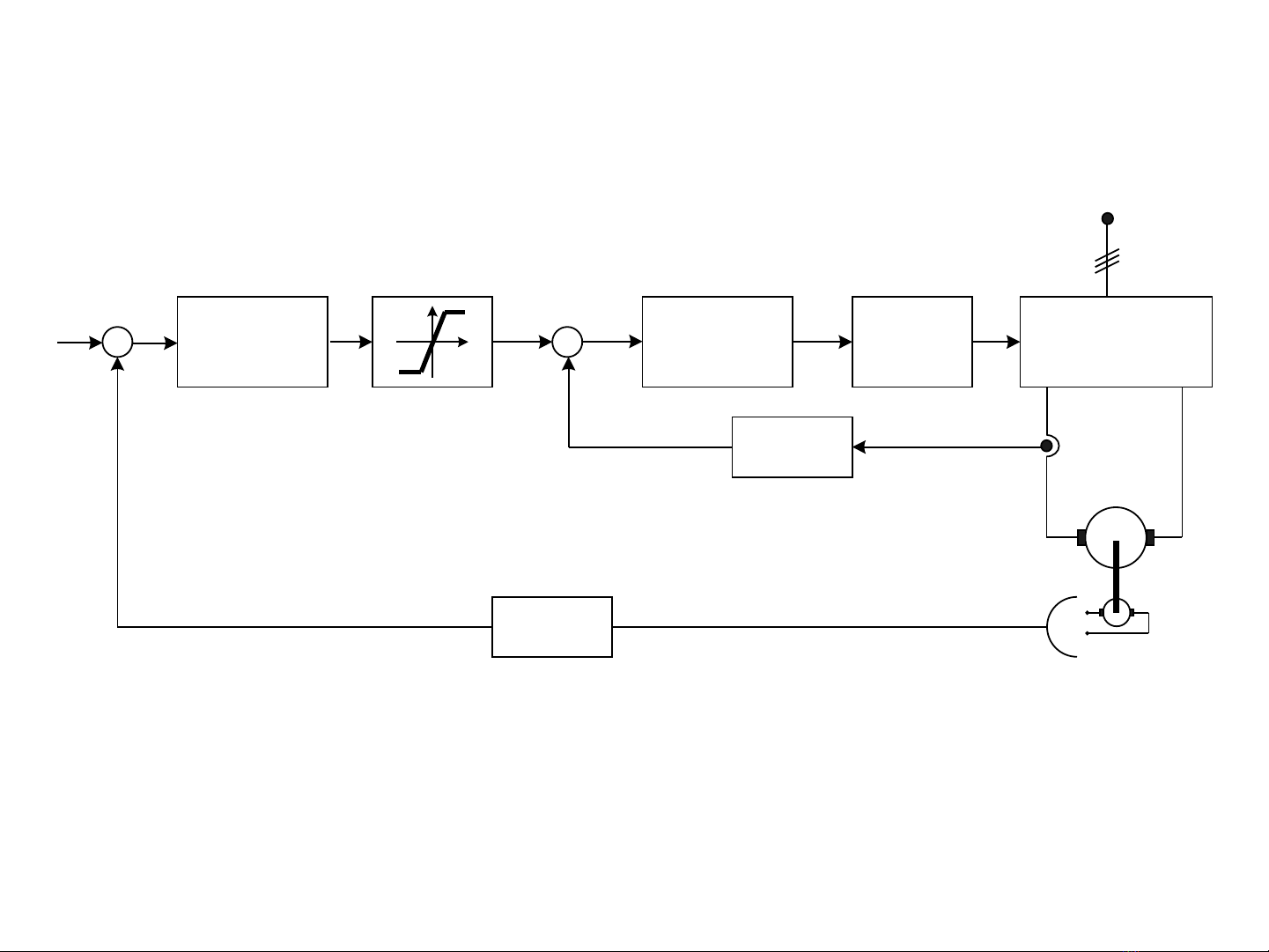
Hàm truy n đ ng c DC kích t đ c l pề ộ ơ ừ ộ ậ
KΦ
u
1
1
u
R
s
τ
+
1
1
m
B
s
τ
+
+-
KΦ
V
d
(s)
+-
E(s) I
ư
(s)
M(s)
M
c
(s)
ω(s)
4
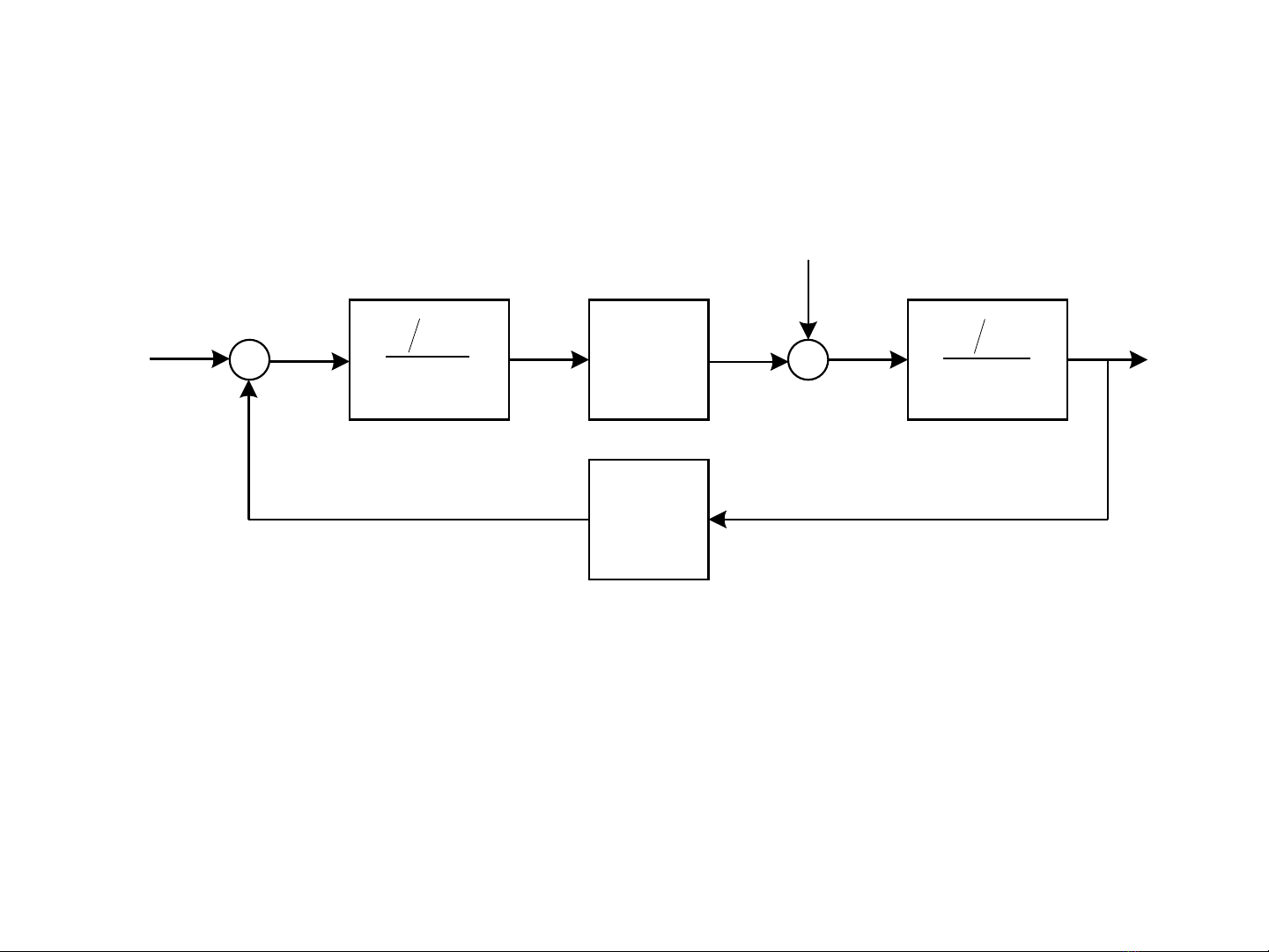
Hàm truy n đ ng c DC kích t đ c l pề ộ ơ ừ ộ ậ
Xét v i Mớc = 0:
KΦ
u
1
1
u
R
s
τ
+
1
1
m
B
s
τ
+
KΦ
Vd(s)
+-
E(s) Iư(s) M(s) ω(s)
m
J
B
τ
=
: th i h ng c c a đ ng cờ ằ ơ ủ ộ ơ
u
u
u
R
L
τ
=
: th i h ng đi n t c a đ ng cờ ằ ệ ừ ủ ộ ơ
5
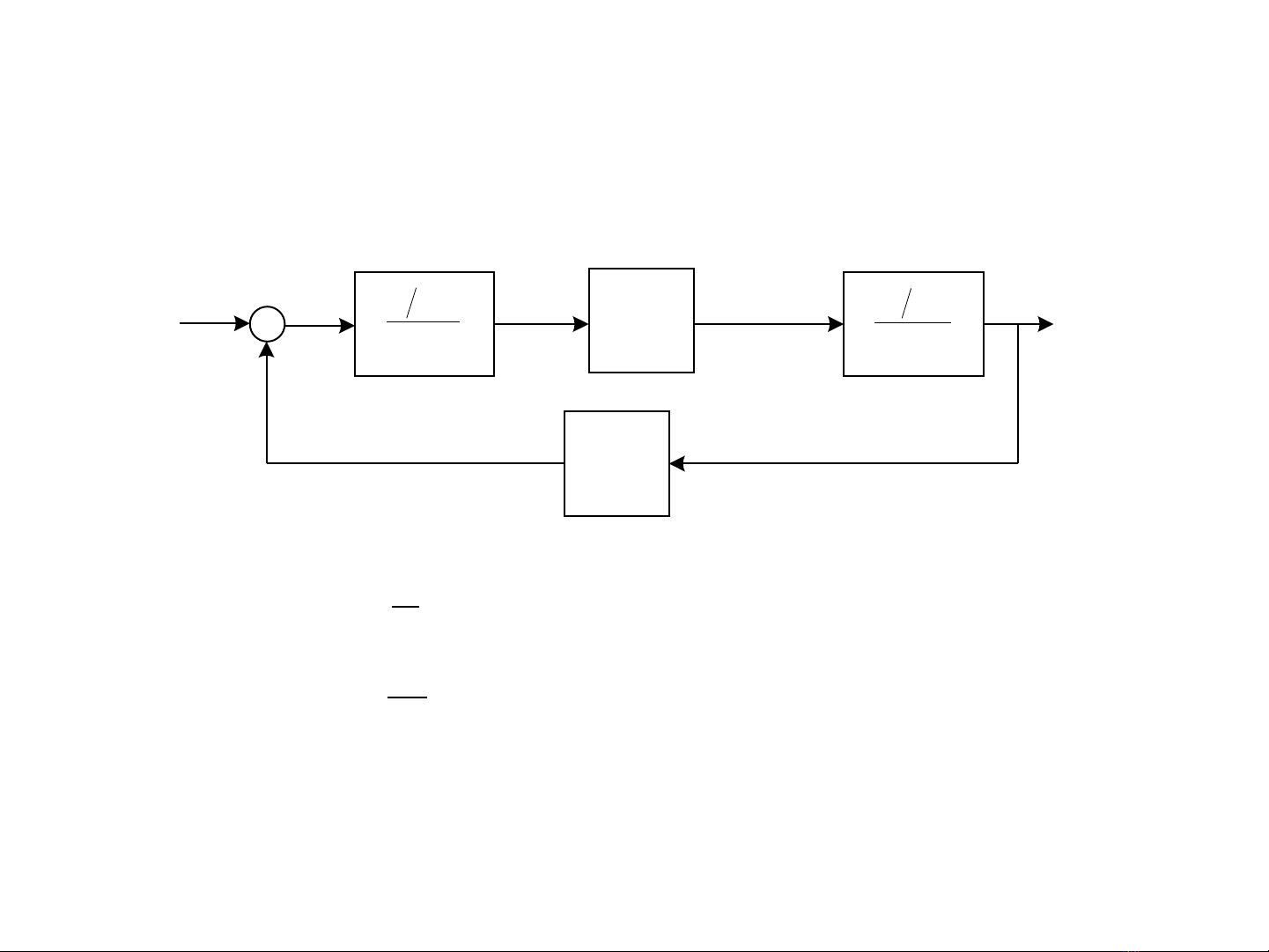
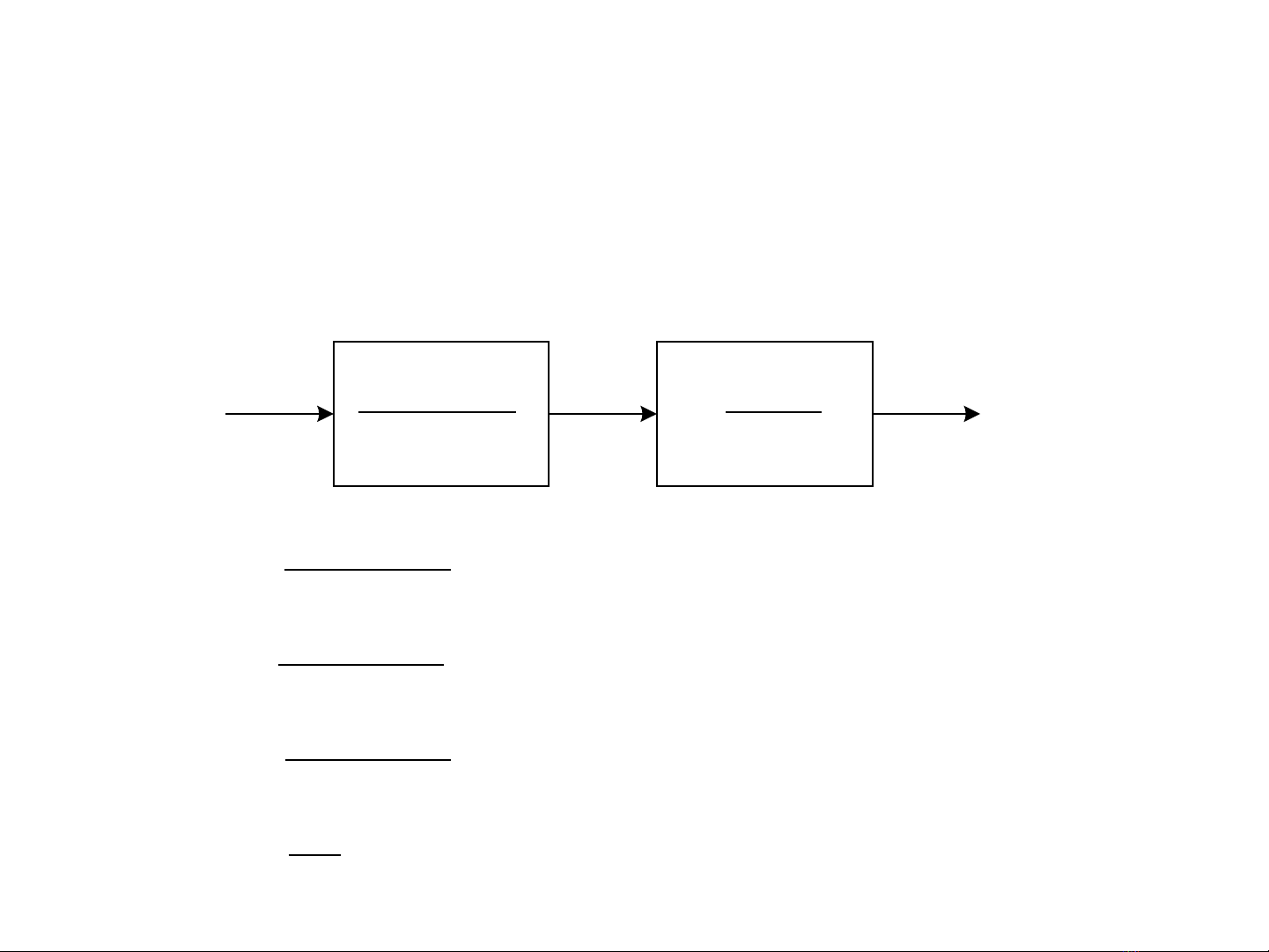
Hàm truy n đ ng c DC kích t đ c l pề ộ ơ ừ ộ ậ
1
1
( 1)
( 1)
m m
m
k s
s
τ
τ
+
+
I
ư
(s) ω(s)
2
1
m
m
k
s
τ
+
V
d
(s)
H th ng trên có th rút g n thành:ệ ố ể ọ
Xét v i Mớc = 0:
( )
12
u
m
u
R B
K R B
τ
=Φ +
( )
2
m
u
K
kK R B
Φ
=Φ +
( )
12
m
u
B
k
K R B
=Φ +
2m
K
kB
Φ
=















![Bài giảng Vi điều khiển Nguyễn Huy Hoàng: Tổng hợp kiến thức [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260316/hoatrami2026/135x160/72211773806757.jpg)
![Bài giảng Tự động hoá thiết bị điện [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260312/hoabattu2026/135x160/61691773631881.jpg)
![Giáo trình Thực hành Truyền động điện Trường Đại học Bà Rịa - Vũng Tàu [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/11121773283865.jpg)
![Giáo trình Thực hành SCADA Trường Đại học Bà Rịa - Vũng Tàu [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/94061773283866.jpg)
![Tài liệu học tập La bàn từ [mô tả/định tính]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/25191773287376.jpg)

![Tài liệu học tập Thiết kế hệ thống nhúng [mới nhất, đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/37051773135929.jpg)



