1Bài giảng 5
408001
Biến đổi năng lượng điện cơ
Giảng viên: TS. Nguyễn Quang Nam
2013 – 2014, HK2
http://www4.hcmut.edu.vn/~nqnam/lecture.php
2Bài giảng 5
Mạch từvới một phần tửchuyển động sẽ được khảo sát.
Mô hình toán cho các hệthống điện cơ thông sốtập
trung sẽ được rút ra.
Một hay nhiều hệcuộn dây tương tác để tạo ra lực hay
mômen trên hệ cơ sẽ được khảo sát.
Hệthống điện cơ – Giới thiệu
3Bài giảng 5
Một cách tổng quát, cả dòng điện trong cuộn dây lẫn
lực/mômen sẽbiến thiên theo thời gian.
Một hệ phương trình vi phân điện cơ có tương quan
được rút ra, và chuyển thành dạng không gian trạng thái,
thuận tiện cho việc mô phỏng trên máy tính, phân tích, và
thiết kế.
Hệthống điện cơ – Giới thiệu (tt)
4Bài giảng 5
S
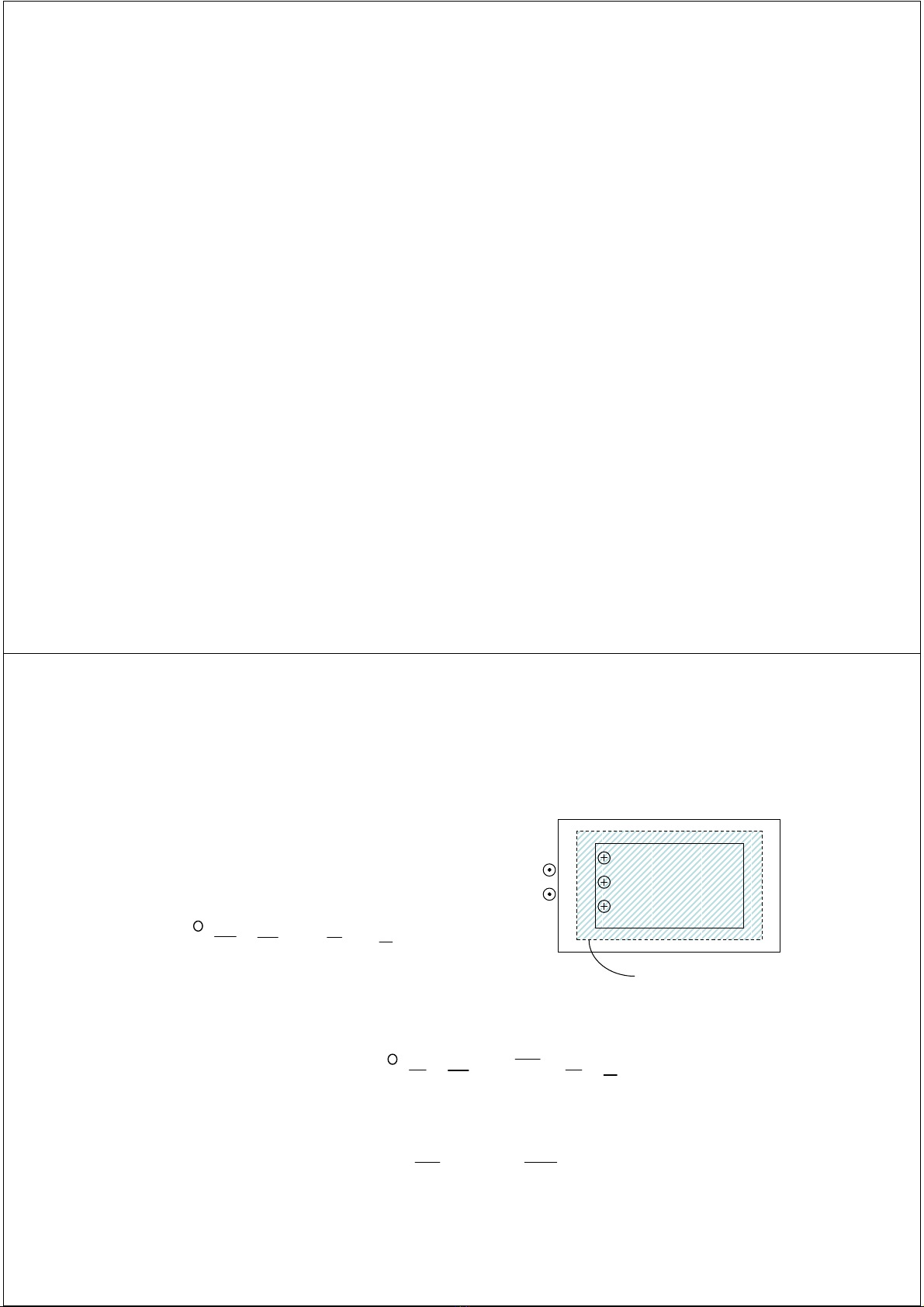
Xét hệthống trong hình 4.1
Định luật Ampere
trởthành
Định luật Faraday
Hệtịnh tiến – Áp dụng các định luật điện từ
∫∫
⋅•=•
Sf
C
daJdlH
η
NiHl
=
∫ ∫
⋅•−=•
C S
daB
dt
d
dlE
η
( )
dt
d
N
dt
d
v
λ
=Φ=
trởthành
Đường kín C
5Bài giảng 5
Hệtịnh tiến – Áp dụng các định luật điện từ(tt)
Việc áp dụng định luật Gauss còn tùy thuộc vào hình dạng,
và cần thiết cho hệthống với các cường độ từ trường H khác
nhau.
Định luật bảo toàn điện tích sẽdẫn đến KCL.
6Bài giảng 5
Với các hệchuyển động tịnh tiến, λ= λ(i, x).
Khi hình dạng của mạch từlà đơn giản, theo định luật
Faraday
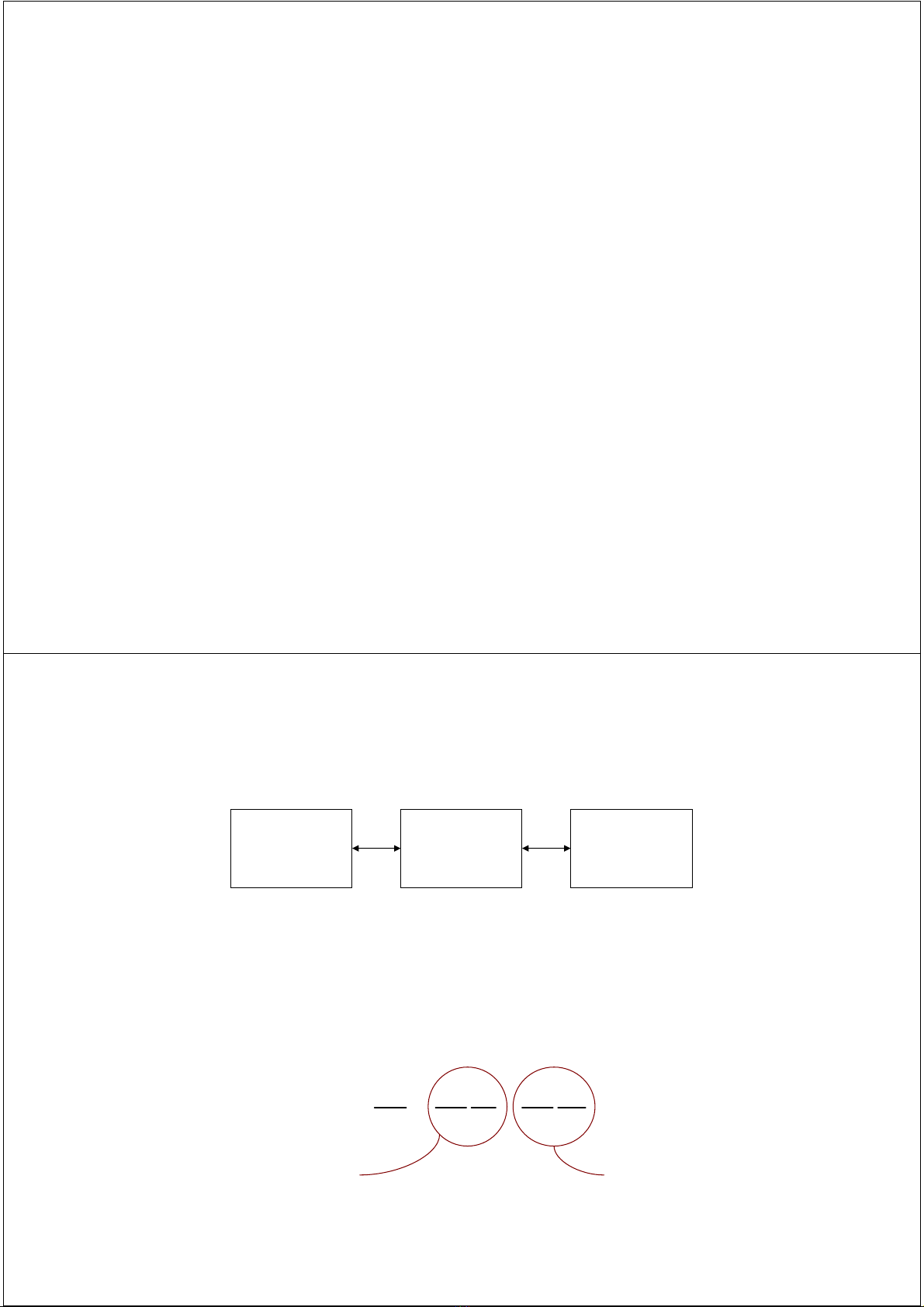
Cấu trúc của một hệthống điện cơ
Hệ điện
(tập trung)
Ghép
điện cơ
Hệ cơ
(tập trung)
v, i, λf
e
, x
or Te, θ
dt
dx
xdt
di
idt
d
v∂
∂
+
∂
∂
==
λ
λ
λ
Điện áp biến áp Điện áp tốc độ
7Bài giảng 5
Như vậy,
Hệtuyến tính về điện
(
)
ixL
=
λ
( )
(
)
dt
dx
dx
xdL
i
dt
di
xLv +=
Với hệkhông có phần tửchuyển động
Li
=
λ
dt
di
Lv =
Với hệcó nhiều cửa
∑∑ ==
∂
∂
+
∂
∂
==
M
j
j
j
k
N
j
j
j
kk
k
dt
dx
xdt
di
idt
d
v
11
λλλ
Nk ,...,2,1
=
Lực và từthông móc vòng có thểlà hàm của tất cảcác biến.
và
8Bài giảng 5
Tìm H
1
, H
2
, λ, và v, với các giảthiết sau: 1) µ= ∞với lõi,
2) g >> w, x >> 2w và 3) không có từthông tản.
Ví dụ4.1
(
)
(
)
(
)
022
2010
=
−
wdHwdH
µ
µ
xg
Ni
HH +
==
21
Dẫn đến
Chọn mặt kín thích hợp, áp dụng định luật Gauss
xg
Niwd
+
=Φ
0
2
µ
Rút ra từthông (tính theo từcảm B
1
chẳng hạn):
9Bài giảng 5
Ví dụ4.1 (tt)
Điện cảm (của hệtuyến tính về điện)
( )
xg
Nwd
xL +
=
2
0
2
µ
( ) ( )
dt
dx
xg
iNwd
dt
di
xg
Nwd
tv
2
2
0
2
0
22
+
−
+
=
µµ
Điện áp cảm ứng
xg
iNwd
N+
=Φ=
2
0
2
µ
λ
Từthông móc vòng
10Bài giảng 5
Vd. 4.2: Hình 4.7. Tìm λ
s
, λ
r
làm hàm của i
s
, i
r
, và θ, và
tìm v
s
và v
r
của rôto hình trụ. Giảthiết µ= ∞, và g << R và l.
Hệthống chuyển động quay
31
2
r
rrss
r
H
g
iNiN
H−=
−
=
42
2
r
rrss
r
H
g
iNiN
H−=
+
=
(
)
lRHNlRHNN
rsrssss
θ
π
µ
θ
µ
φ
λ
−
+
=
=
2010
Có thểchứng minh được:
Sau khi tính được các cường độ từ trường, từthông móc
vòng được xác định bởi:












![Giáo trình Tính toán thiết kế hệ thống máy lạnh và điều hoà không khí (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoabattu2026/135x160/70831778842526.jpg)













%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)