
L p c đi n t 2-K47ớ ơ ệ ử
Đ ng cộ ơ trong robot
I.Đ ng cộ ơ bưc :ớ
1.M đ uở ầ
L i ích c a đ ng c b c :ợ ủ ộ ơ ướ
Không ch i than: ổKhông x y ra hi n t ng đánh l a ch i than làm t nả ệ ượ ử ổ ổ
hao năng l ng, t i m t s môi tr ng đ c bi t (h m lò...) có th gâyượ ạ ộ ố ườ ặ ệ ầ ể
nguy hi mể
T o đ c mômen gi :ạ ượ ữ M t v n đ khó trong đi u khi n là đi u khi nộ ấ ề ề ể ề ể
đ ng c t c đ th p mà v n gi đ c mômen t i l n. Đ ng c b c làộ ơ ở ố ộ ấ ẫ ữ ượ ả ớ ộ ơ ướ
thi t b làm vi c t t trong vùng t c đ nh . Nó có th gi đ c mômenế ị ệ ố ố ộ ỏ ể ữ ượ
th m chí c v trí nh vào tác d ng hãm l i c a t tr ng rotor.ậ ả ị ừ ụ ạ ủ ừ ườ
Đi u khi n v trí theo vòng h : ề ể ị ở M t l i th r t l n c a đ ng c b c làộ ợ ế ấ ớ ủ ộ ơ ướ
ta có th đi u ch nh v trí quay c a roto theo ý mu n mà không c n đ nể ề ỉ ị ủ ố ầ ế
ph n h i v trí nh các đ ng c khác, không ph i dùng đ n encoder hayả ồ ị ư ộ ơ ả ế
máy phát t c (khác v i servo).ố ớ
Đ c l p v i t i:ộ ậ ớ ả V i các lo i đ ng c khác, đ c tính c a t i r t nhớ ạ ộ ơ ặ ủ ả ấ ả
h ng t i ch t l ng đi u khi n. V i đ ng c b c, t c đ quay c aưở ớ ấ ượ ề ể ớ ộ ơ ướ ố ộ ủ
rotor không ph thu c vào t i (khi v n n m trong vùng momen có th kéoụ ộ ả ẫ ằ ể
đ c). Khi momen t i quá l n gây ra hi n t ng ượ ả ớ ệ ượ tr tượ , do đó không thể
ki m soát đ c góc quay.ể ượ
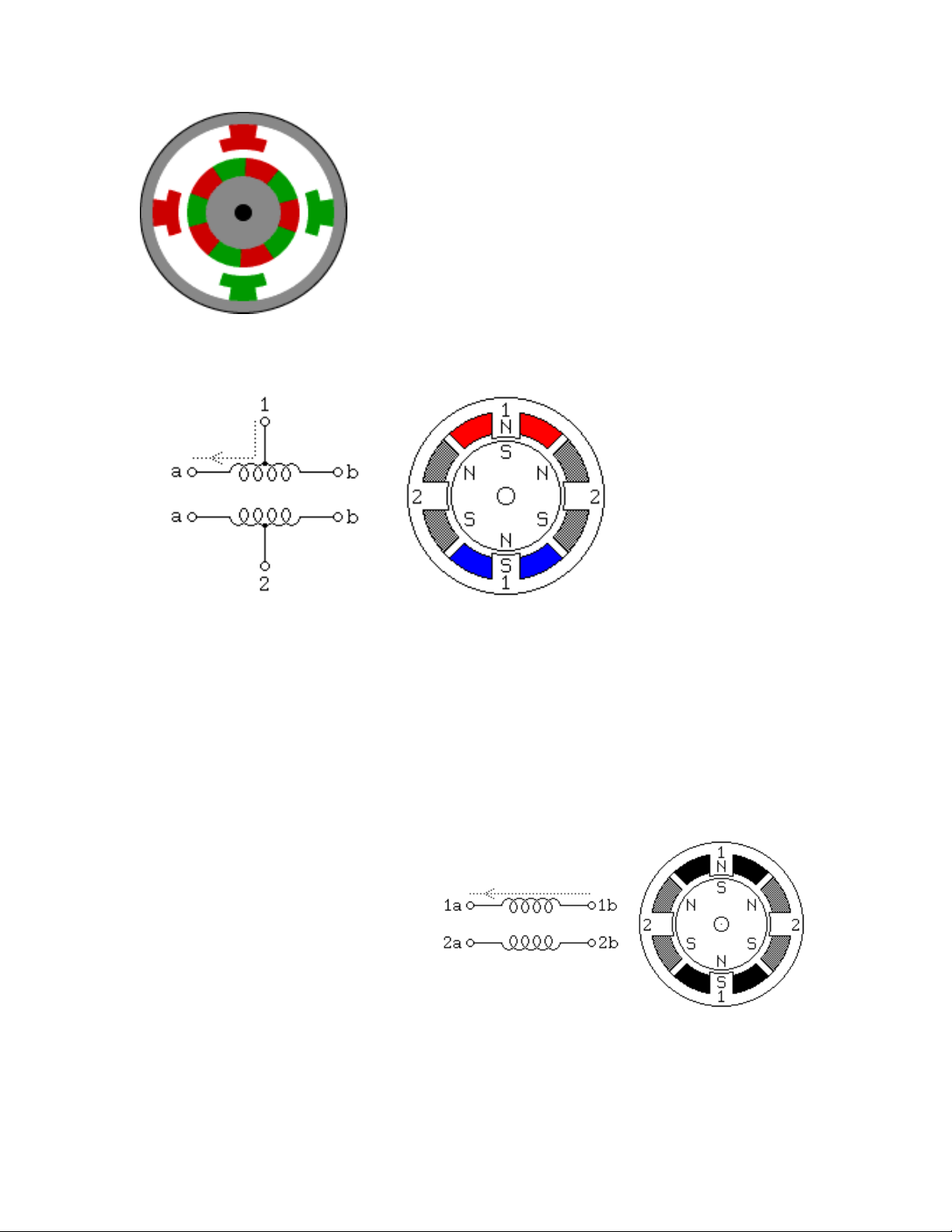
Phân lo i đ ng c :ạ ộ ơ
Đ ng c bu c v i roto là nam châm vĩnh c u ộ ơ ớ ớ ử
- nh n bi t :ậ ế
+ Khi m t nhãn mác, khi quay tr c đ ng c b c có rotor là nam châmấ ụ ộ ơ ướ
vĩnh c u ta s th y v ng theo chu kỳ răng c a.Trong khi đó, n u làử ẽ ấ ướ ư ế
đ ng c t tr s th y tr n.ộ ơ ừ ở ẽ ấ ơ
+ Cũng có th phân bi t b ng đ ng h v n năng. Đ ng c t trể ệ ằ ồ ồ ạ ộ ơ ừ ở
th ng có 3-4 cu n dây đ c đ u chung GND trong khi đ ng c namườ ộ ượ ấ ộ ơ
châm vĩnh c u thì không. ử
Nhóm : NNT-DR 1
L p c đi n t 2-K47ớ ơ ệ ử
- phân lo i đ ng c :ạ ộ ơ
+)Đ ng c lo i đ n c cộ ơ ạ ơ ự (Unipolar), th ng có 6 đ u ra. Đ u 1,2ườ ầ ầ
th ng đ c n i v i c c d ng, hai đ u a và b có th đ c n iườ ượ ố ớ ự ươ ầ ể ượ ố
xu ng đ t ho c không s quy t đ nh chi u quay c a đ ng c .ố ấ ặ ẽ ế ị ề ủ ộ ơ
+)Đ ng c lo i l ng c cộ ơ ạ ưỡ ự (Bipolar), th ng có 4 đ u ra. V c u t oườ ầ ề ấ ạ
đ n gi n h n nh ng khó cho đi u khi n vì ph i đ o chi u dòng đi nơ ả ơ ư ề ể ả ả ề ệ
qua cu n dây a,b.ộ
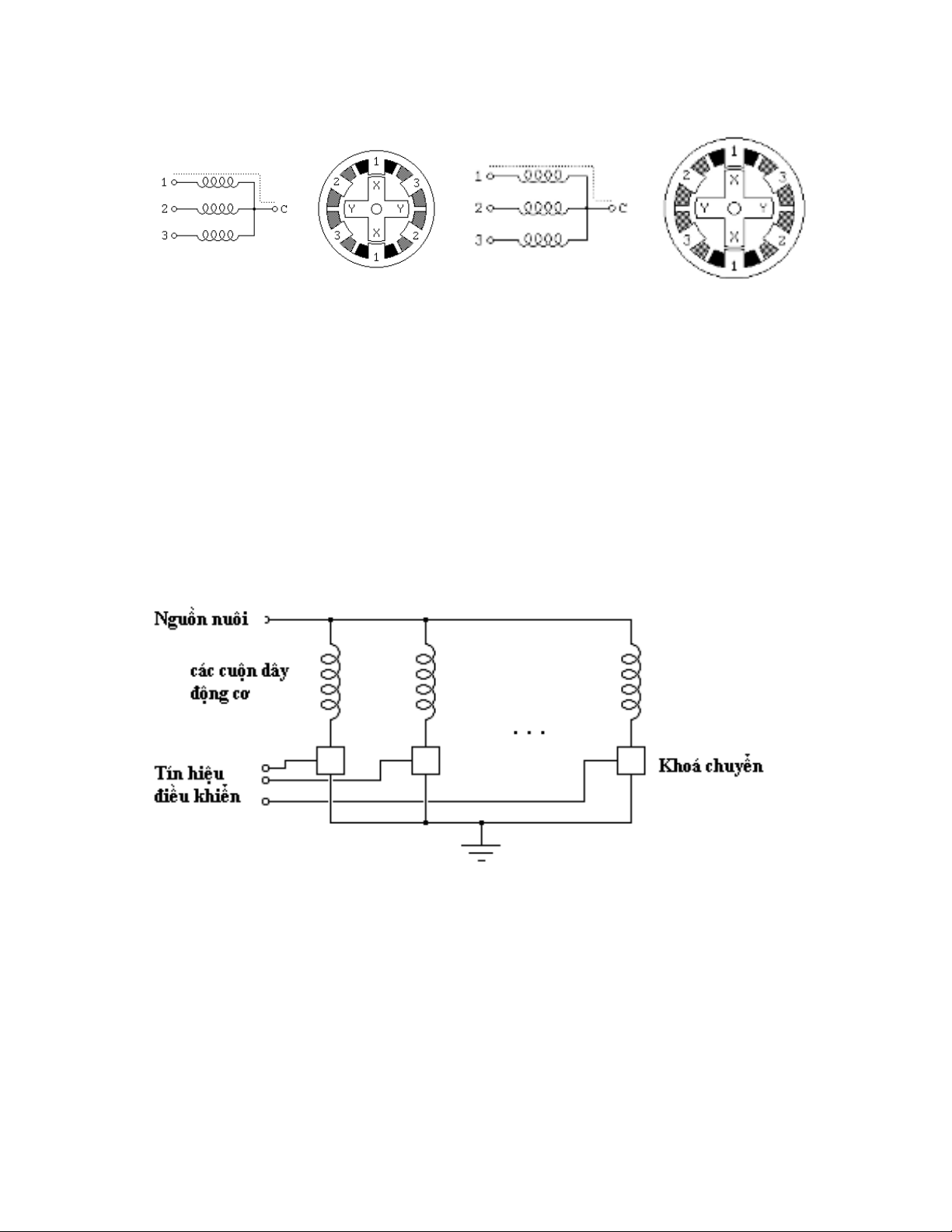
Đ ng c b c ki u t tr ộ ơ ướ ể ừ ở
Nhóm : NNT-DR 2
L p c đi n t 2-K47ớ ơ ệ ử
Nguyên lí :
Thông th ng có ba ho c b n cu n dây đ u chung m t đ u. Đ u chungườ ặ ố ộ ấ ộ ầ ầ
đ c n i v i ngu n d ng, các đ u còn l i l n l t cho thông v i đ t đượ ố ớ ồ ươ ầ ạ ầ ượ ớ ấ ể
quay rotor.
Trên hình v , rotor có 4 răng và stator có 6 c c. M i cu n dây s đ cẽ ự ỗ ộ ẽ ượ
qu n trên hai c c đ i nhau. Vì v y, gi s , khi c p đi n cho c c 1 (stator),ấ ự ố ậ ả ử ấ ệ ự
rotor s quay c c g n nh t (X) đ răng th ng v i c c 1. C t đi n cu n sẽ ự ầ ấ ể ẳ ớ ự ắ ệ ộ ố
1, ti p t c c p đi n cho cu n 2, rotor s quay răng ti p sau (Y) cho th ngế ụ ấ ệ ộ ẽ ế ẳ
v i c c 2. C nh v y đi u khi n quay rotor.ớ ự ứ ư ậ ề ể
S đ đi u khi n c b n c a đ ng c t tr :ơ ồ ề ể ơ ả ủ ộ ơ ừ ở
Đi n áp đ c c p qua các khoá chuy n đ nuôi các cu n dây, t o ra tệ ượ ấ ể ể ộ ạ ừ
tr ng làm quay rotor. Các khoá đây không c th , có th là b t c thi tườ ở ụ ể ể ấ ứ ế
b đóng c t nào đi u khi n đ c nh r le, transitor công su t... Tín hi uị ắ ề ể ượ ư ơ ấ ệ
đi u khi n có th đ c đ a ra t b đi u khi n nh vi m ch chuyênề ể ể ượ ư ừ ộ ề ể ư ạ
d ng, máy tính.ụ
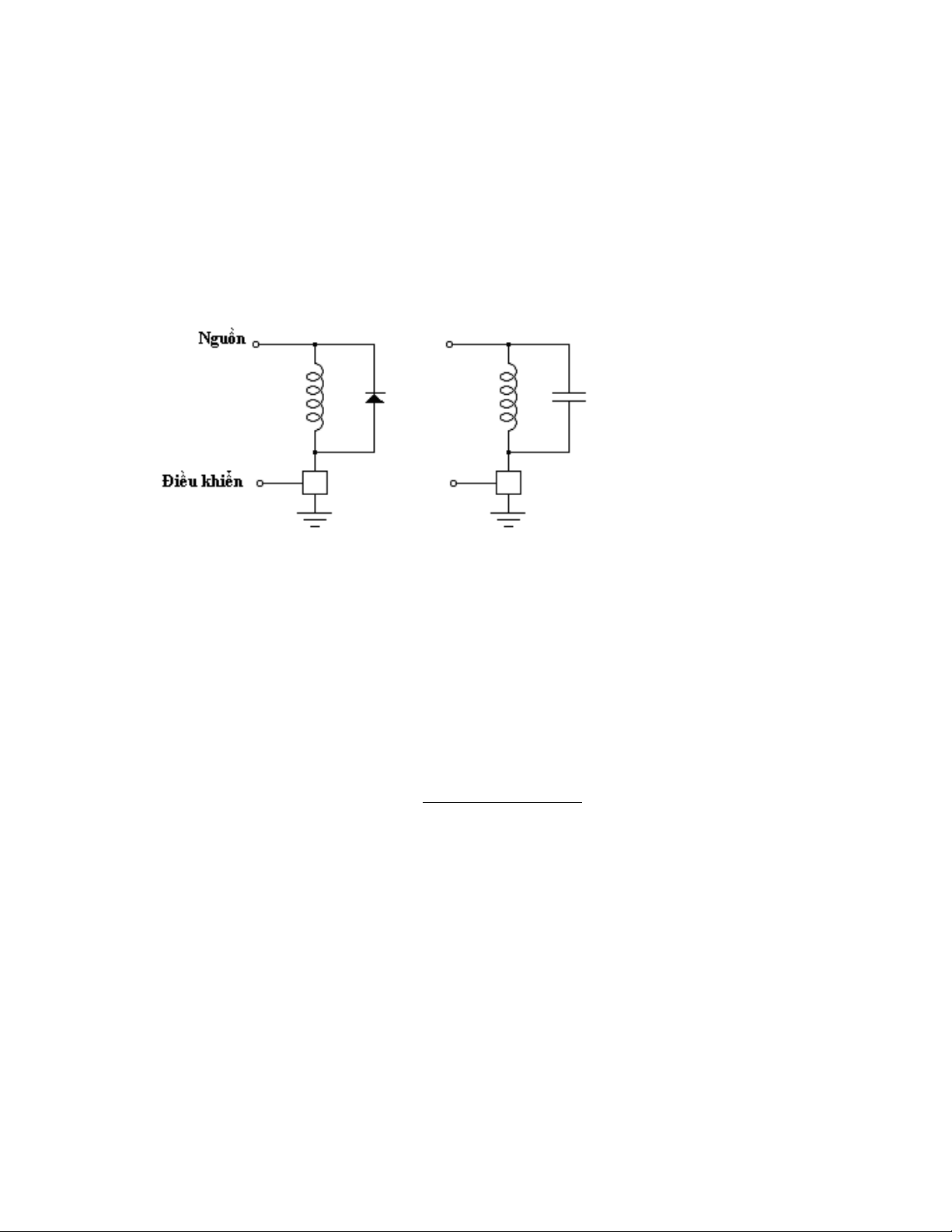
V n đ b o v khóa đi u khi n :ấ ề ả ệ ề ể
Nhóm : NNT-DR 3
L p c đi n t 2-K47ớ ơ ệ ử
Do cu n dây đ ng c có tính ch t c m nên không th đóng c t dòng quaộ ộ ơ ấ ả ể ắ
cu n dây ngay l p t c. Khi đóng, dòng trong cu n dây tăng t t , tr soộ ậ ứ ộ ừ ừ ễ
v i áp. Khi m khoá, dòng này có th gây lên m t đi n áp l n đánh th ngớ ở ể ộ ệ ớ ủ
ti p đi m c a khoá.ế ể ủ
Đ tránh v n đ này có hai ph ng cách gi i quy t:ể ấ ề ươ ả ế
+ M c vào hai đ u cu n dây m t diode ng cắ ầ ộ ộ ượ
+ M c vào hai đ u cu n dây m t t đi nắ ầ ộ ộ ụ ệ
Nh hình v :ư ẽ
C1: Diode đ m b o d n dòng qua trong m t th i gian ng n. N u dùngả ả ẫ ộ ờ ắ ế
diode th ng, lo i 1N400x c n m c song song thêm m t t nh .ườ ạ ầ ắ ộ ụ ỏ
C2: Khi m khoá, năng l ng trong cu n dây s đ c n p vào t . Đi n ápở ượ ộ ẽ ượ ạ ụ ệ
trên b n c c t cao h n đi n áp ngu n và ph i đ m b o nh h n đi n ápả ự ụ ơ ệ ồ ả ả ả ỏ ơ ệ
ch u đ ng c a khoá chuy n. T đó có công th c tính t b o v nh trên.ị ự ủ ể ừ ứ ụ ả ệ ư
Khi khoá đóng, áp t t x qua khoá và khoá cũng c n ch u đ c đi n ápừ ụ ả ầ ị ượ ệ
này.
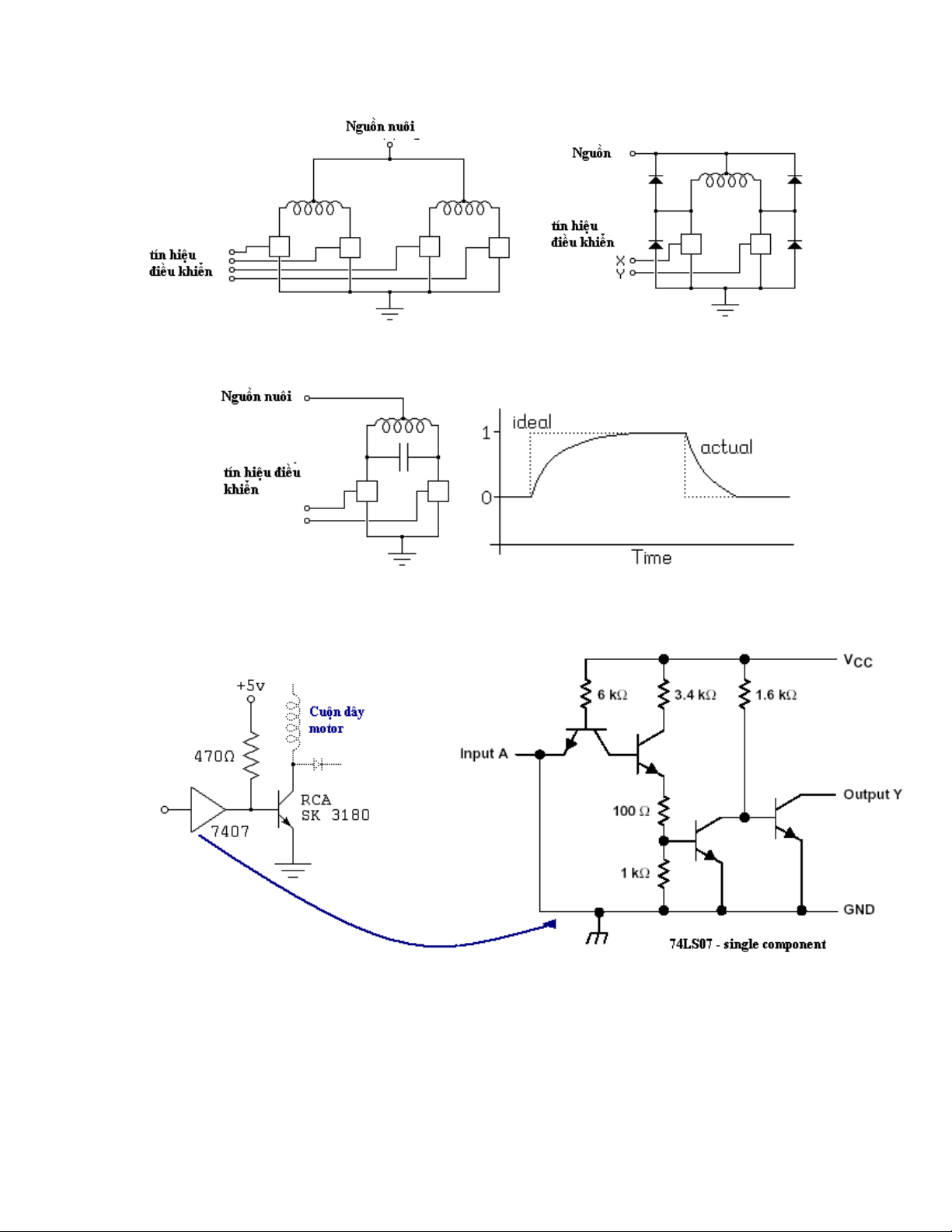
Đi u khi n đ ng c b c đ n c c :ề ể ộ ơ ướ ơ ự
Nhóm : NNT-DR 4
2 2
2
2
_ ax
/ 2 / 2
( )
van m ng
P CU LI
LI
CU U
= =
>−
L p c đi n t 2-K47ớ ơ ệ ử
M ch th c tạ ự ế :
Khoá chuy n m ch dùng là transitor SK3180 v i h s khu ch đ iể ạ ớ ệ ố ế ạ
kho ng 1000 l n. V i đi n tr baz là 470 Ohm, dòng baz kho ng 10ả ầ ớ ệ ở ơ ơ ả
mili Ampe, nghĩa là có th cho dòng qua cu n dây đ t vài Ampe.ể ộ ạ
Nhóm : NNT-DR 5







![Giáo trình Kỹ thuật cảm biến (Nghề Điện tử công nghiệp) - CĐ Công nghiệp & Thương mại [PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210601/ermintrudetran/135x160/8391622516138.jpg)
![Giáo trình Kỹ thuật cảm biến Cơ điện tử CĐ Công nghiệp Hải Phòng [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210521/agatha25/135x160/7811621607840.jpg)












![Bài giảng Kỹ thuật robot [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/366_bai-giang-ky-thuat-robot.jpg)
![Câu hỏi ôn tập Cơ sở xử lý ảnh số [năm] chuẩn nhất](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250710/kimphuong1001/135x160/84701752136985.jpg)

![Câu hỏi ôn tập Robot công nghiệp [năm hiện tại]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kimphuong555/135x160/7711751422232.jpg)
