
Ch ng 4:ươ
Ch ng 4:ươ
CHUY N ĐI ĐO Ể Ổ
CHUY N ĐI ĐO Ể Ổ
L NGƯỜ
L NGƯỜ
1. KHÁI NI M CHUNGỆ
Chuyển đổi đo lường là dụng cụ dùng để tạo một
quan hệ đơn trị giữa hai đại lượng vật lí với một
độ chính xác nhất định
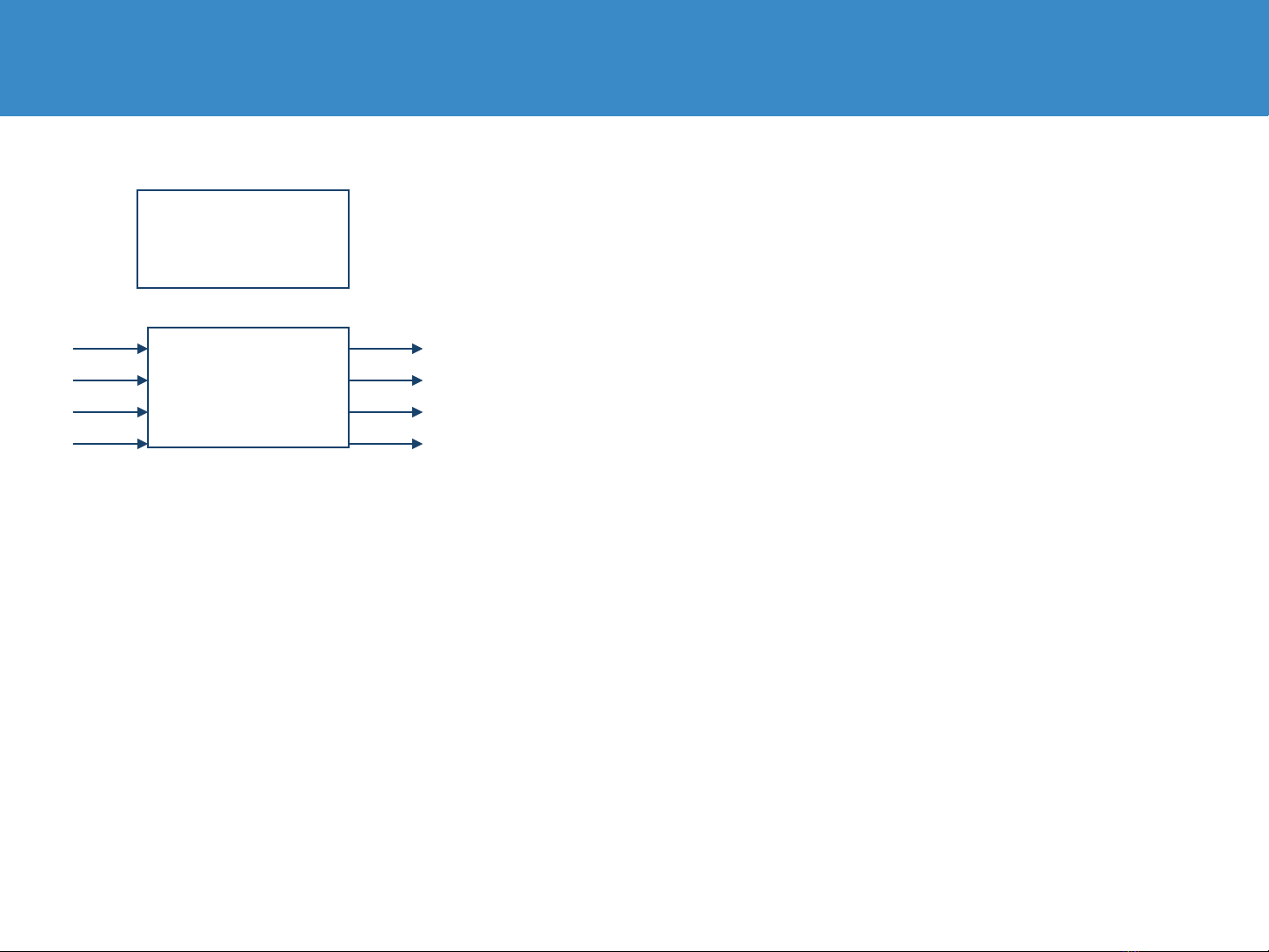
Cảm biến là chuyển đổi đo lường được đặt trong
một khối hình học có kích thước nhất định và có
các đầu nối tín hiệu ra.
C m bi nả ế
Sensor
Chuy n đi ể ổ
s c pơ ấ
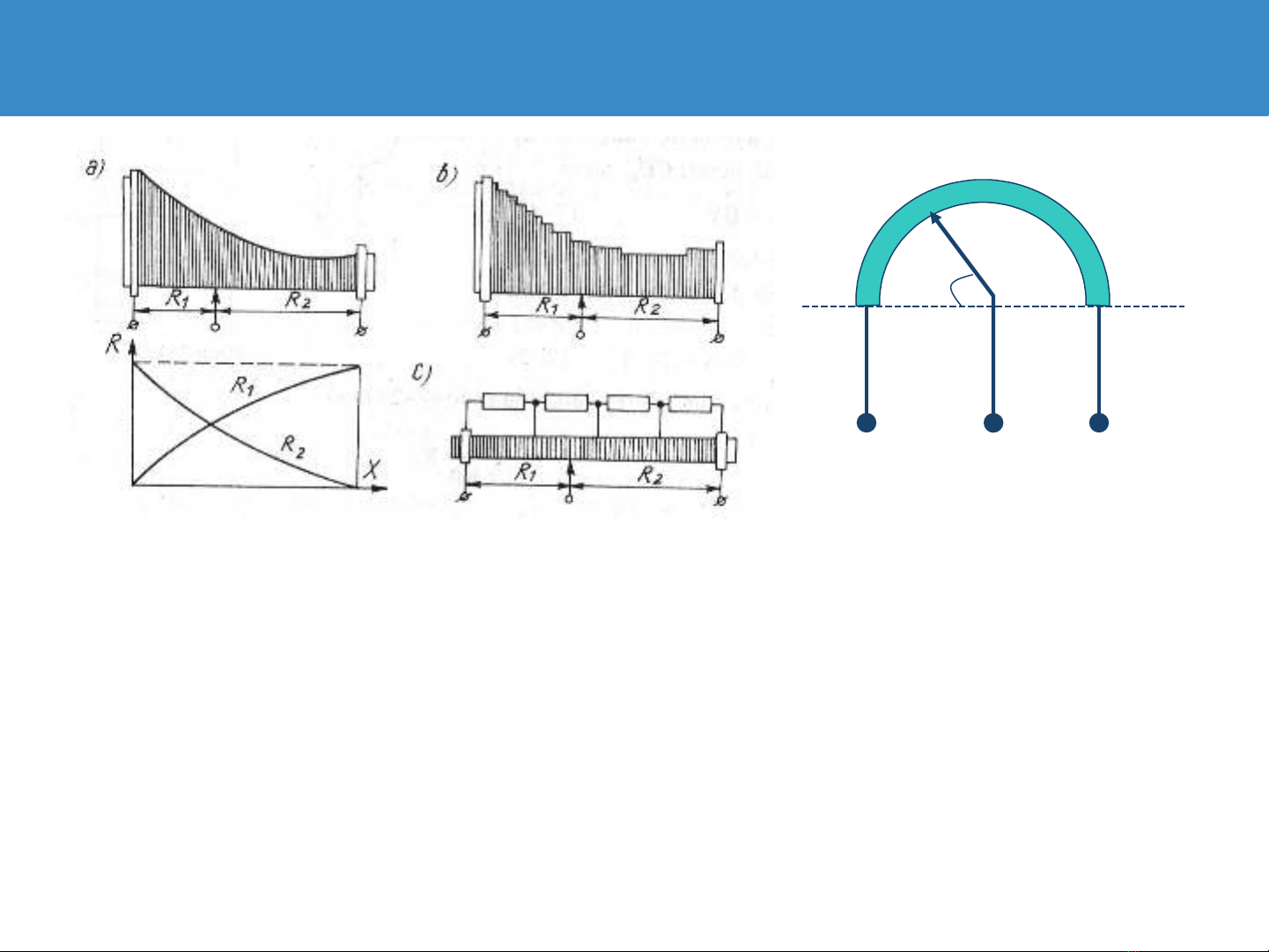
Chuyển đổi điện trở
Dùng để đo các đại lượng (di chuyển, góc quay)
dựa trên sự biến đổi của điện trở chuyển đổi.
Biến trở được làm bằng dây điện trở hay thanh
điện trở. Vật liệu thường dùng là Mn
Giá trị không thay đổi theo nhiệt độ.
21
2
RR
R
E
E
T
out
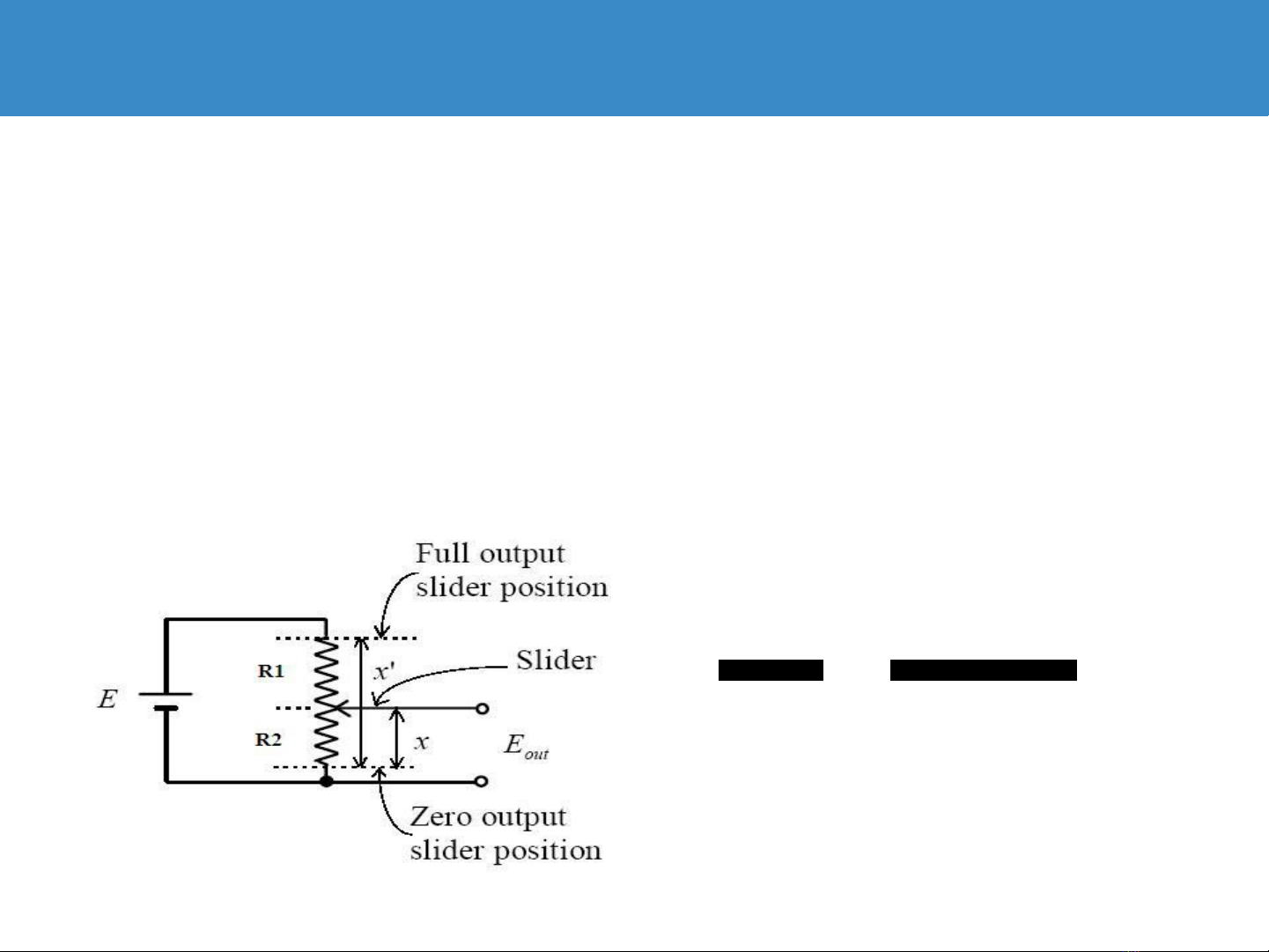
• The output voltage depends on the wiper position and
therefore is a function of the shaft position.
• In figure below, the output voltage Eout is a fraction of
ET, depending on the position of the wiper.
• The element is considered perfectly linear if the
resistance of the transducer is distributed uniformly along
the length of travel of wiper.
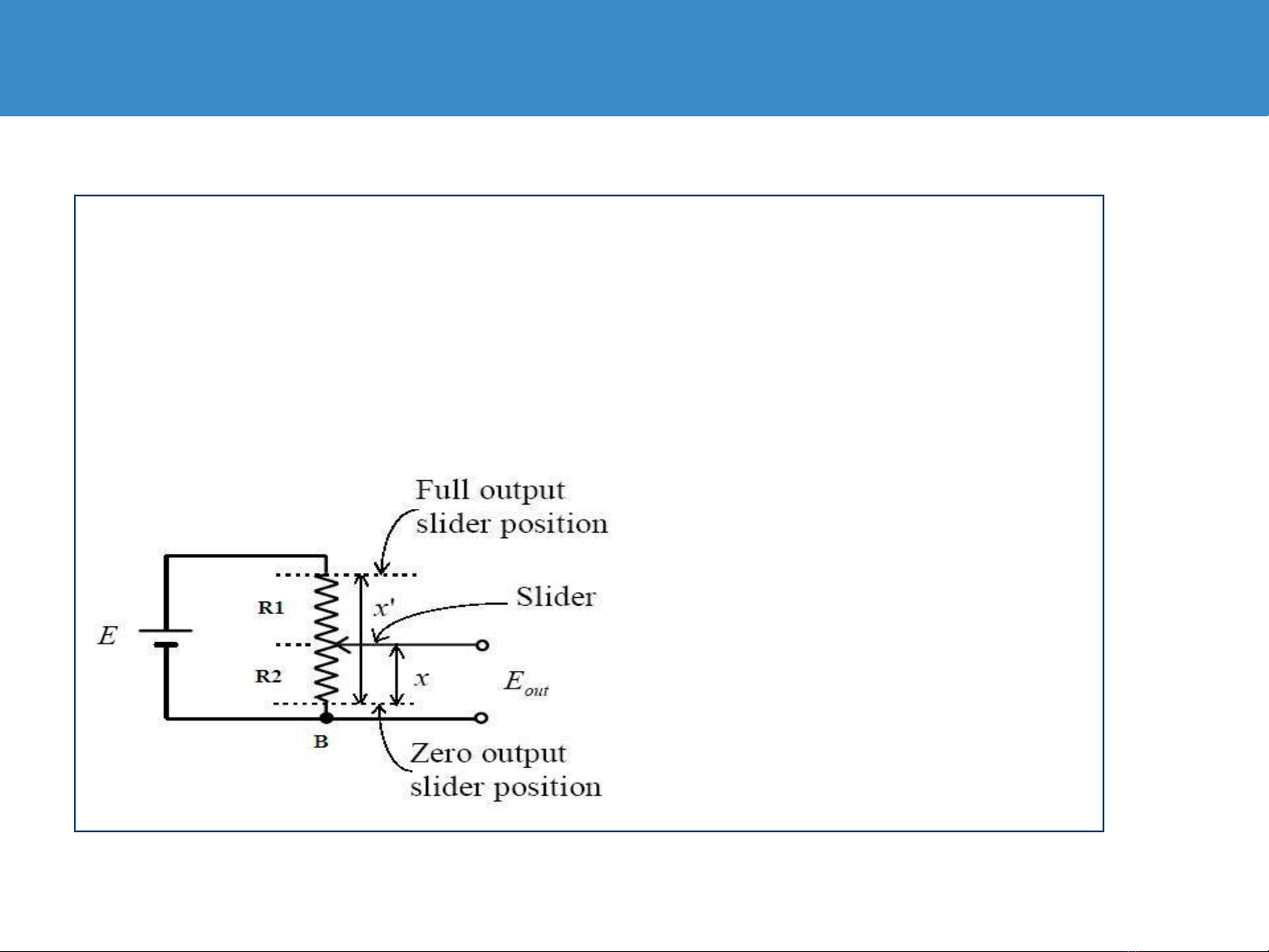
Ví dụ
Một chuyển đổi điện trở dài 5.5 cm dùng trong mạch
như hình vẽ. Điện trở tổng là 4.7kΩ. Nguồn cung cấp
là ET= 3V.
Con trượt có vị trí 0.9 cm tính từ điểm B, điện áp ra
bằng bao nhiêu Eout?

![Bài giảng Đo lường nhiệt PGS.TS Hoàng Dương Hùng [Full/Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250212/tuetuebinhan666/135x160/2865289_7611.jpg)



![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)














