
LÝ THUYẾT
ĐIỀU KHIỂN
TỰ ĐỘNG
GIẢNG VIÊN: LÊ LƯƠNG HƯƠNG THẢO
0
Ma!họcphần: 0101003072

Chương 1. Phần tử và hệ thống điều khiển tự động
Chương 2. Mô hình toán học hệ thống điều khiển liên tục
Chương 3. Khảo sát tính ổn định của hệ thống
Chương 4. Đánh giá chất lượng hệ thống điều khiển
Chương 5. Thiết kế hệ thống điều khiển liên tục
Chương 6. Mô tả toán học hệ thống điều khiển rời rạc
Chương 7. Phân tích và thiết kế hệ thống điều khiển rời rạc
NỘI DUNG HỌC PHẦN
2023 1
Lý thuyết điều khiển tự động

1.1. Khái niệm điều khiển
1.2. Các nguyên tắc điều khiển
1.3. Phân loại điều khiển
1.4. Một số ví dụ về hệ thống điều khiển tự động
CHƯƠNG 1. PHẦN TỬ VÀ HỆ THỐNG
ĐIỀU KHIỂN TỰ ĐỘNG
2023 Chương 1: Phần tử và hệ thống điều khiển tự động 2
1.1. KHÁI NIỆM ĐIỀU KHIỂN
2023 Chương 1: Phần tử và hệ thống điều khiển tự động 3
1.1. KHÁI NIỆM ĐIỀU KHIỂN
4
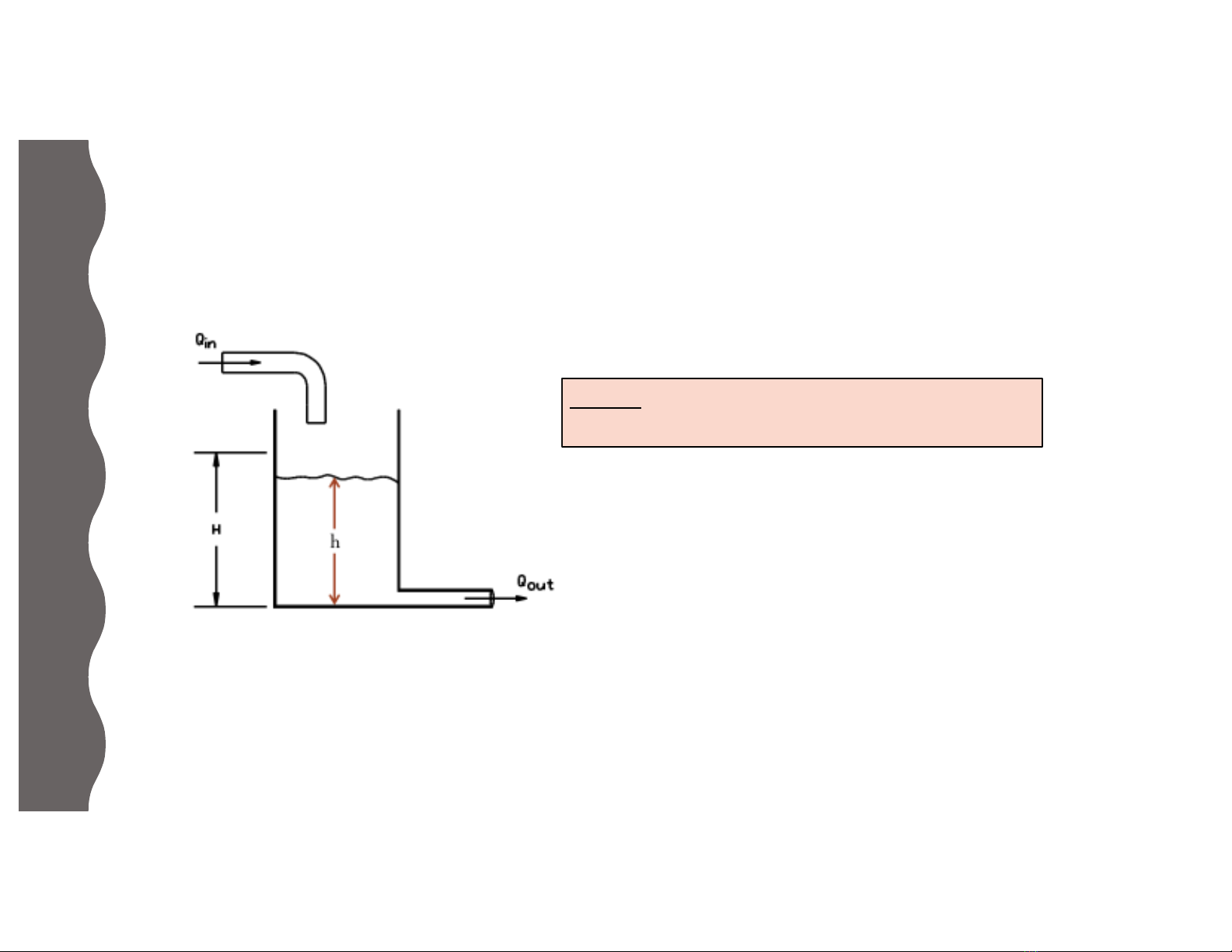
Ví dụ:
Muốn duy trì mực nước trong bể h = H
Qout phụ thuộc vào h
•Qout = Qin, h không thay đổi
•Qout > Qin, mực nước cao lên
•Qout < Qin, mực nước thấp đi
2023 Chương 1: Phần tử và hệ thống điều khiển tự động 4





![Bài giảng môn Mô phỏng và mô hình hóa [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260210/diegomaradona04/135x160/97521771929274.jpg)



















