1
MÔN HỌC
Ứng dụng Vi điều khiển
(Microcontroller Applications)
By Trần Văn Hùng
Mechatronics Dept
http://www.ntu.edu.vn/
Email: tvh42th@gmail.com
Tài liệu tham khảo
1.Microprofessors and microcpmputers hardware and softwware, Ronaid J.Tocci, Frank J.Ambrosio,
Prentice Hall, 2003
2.Interfacing Sensors To The Pc, Willis J.Tompkin, Jonh G.webster,Prentice Hall, 1998
3.Vi xử lý, Văn ThếMinh, NXB Giáo Dục.
4.Họ vi điều khiển 8051, Tống Văn On.
5.Kỹthuật Vi điều khiển AVR, Tống Văn On.
2
Nội dung chương trình
nCh01: Các hệ đếm vàmã hoá
nCh02: Hệthống vi xửlý
nCh03: Bộnhớ
nCh04: Họ vi điều khiển AVR
nCh05: Ngôn ngữlập trình CodevisionAVR
nCh06: Input/Output
Các bài toán
1. Thiếtkếmạch điềukhiểnánhsángtheochươngtrình địnhtrước
2. Thiếtkếmạchtrangtríbằng đènLED
3. Thiếtkếmạchnhậndạng điểmphụcvụ(thêm ít nhất 2IC)
4. Thiếtkếmạch đolượngmưa
5. Thiếtkếmạch điềukhiểnnhiệtđộ không khí
6. Thiết kếmạch điều khiển nhiệt độ dung dịch
7. Thiết kếmạch đồng hồ điện tử
8. Thiết kếmạch tính thời gian cho các môn điền kinh
9. Thiết kếbảng quang báo
10. Thiết kếmạch khoá điện tử
11. Thiết kếmạch điều khiển thiết bịbằng remote
12. Kết nối bàn phím máy tính với VXL, hiển thịký tựlên LCD
13. Thiết kếmạch điều khiển Robot chạy theo qũy đạo (sd motor bước)
14. Thiết kếmạch điều khiển tốc độ động cơ DC
15. Thiết kếmạch điều khiển góc quay của môtơ, ổn tốc cho motor.
1
Chương 1: Các hệ đếm vàmã hoá
nCác hệ đếm dùng trong máy tính
nCác phép toán sốhọc đối với hệhai
nMã ASCII
1.1 Các hệ đếm dùng trong máy tính
1.1.1 Hệ mười vàhệhai
nCon người thìquen dùng hệ cơ số mười (hệ mười)
1234,56 = 1.103+ 2.102+ 3.101+ 4.100+ 5.10-1 + 6.10-2
nMáy tính thìchỉlàm việc với hệ cơ sốhai (hệhai)
1011,01 = 1.23+ 0.22+ 1.21+ 1.20+ 0.2-1 + 1.2-2
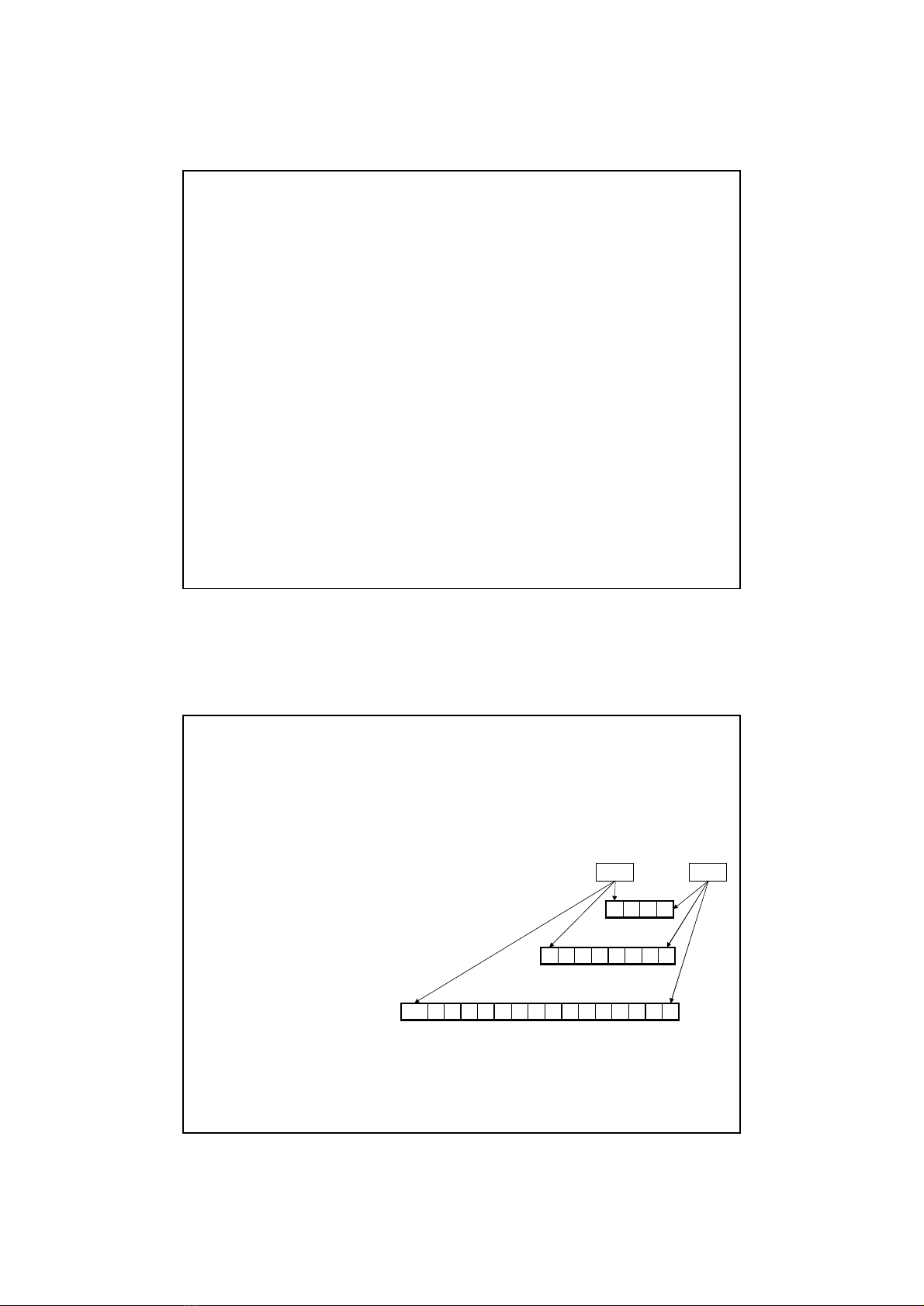
nNibble gồm 4 bit
nByte gồm 8 bit
nWord gồm 16 bit
03
7 0
15 0
MSB LSB
2
1.1.1 Chuyển đổi giữa hệ mười vàhệhai
nĐổi hệhai sang hệ mười
1011,012= 1.23+ 0.22+ 1.21+ 1.20+ 0.2-1 + 1.2-2 = 11,2510
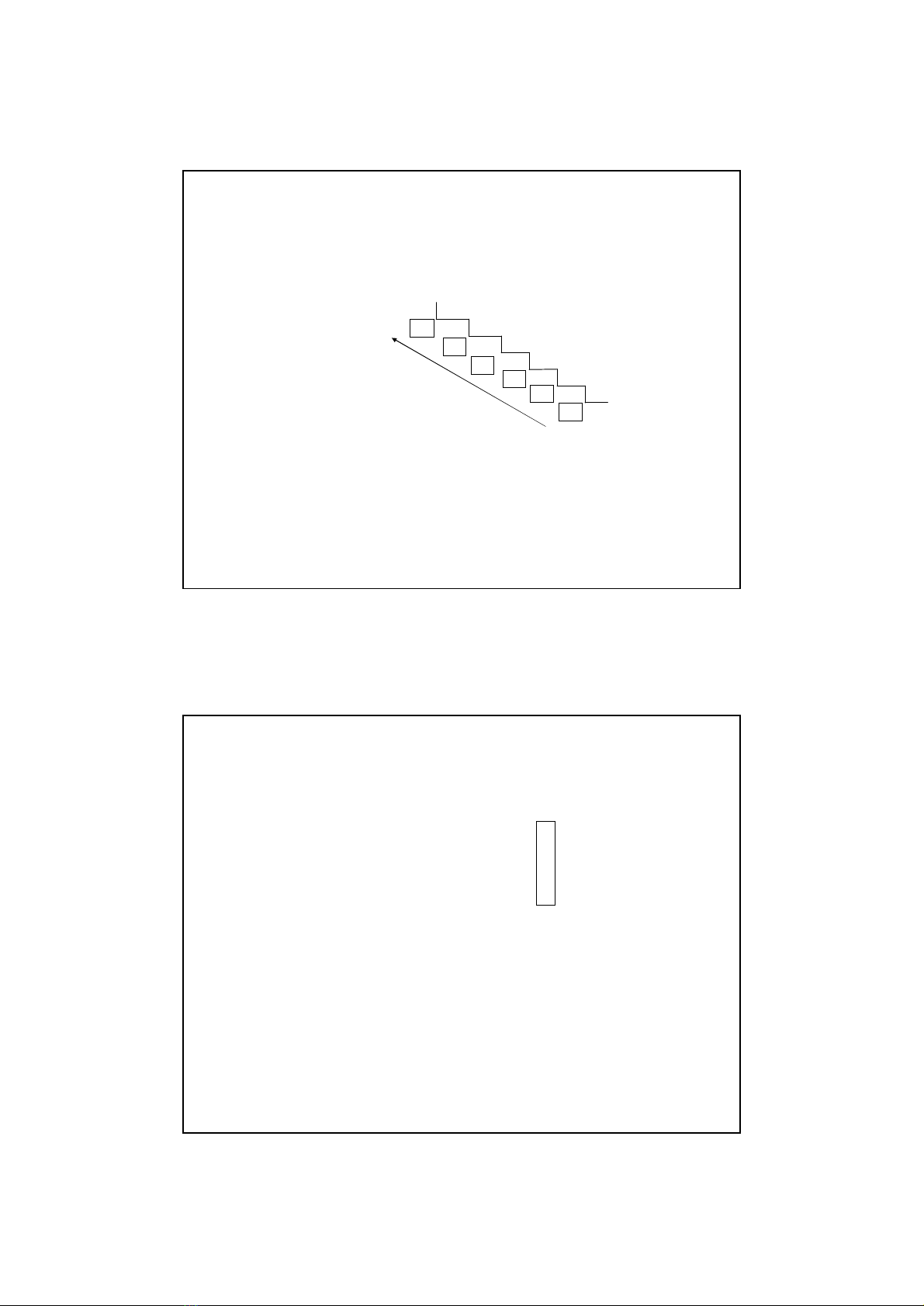
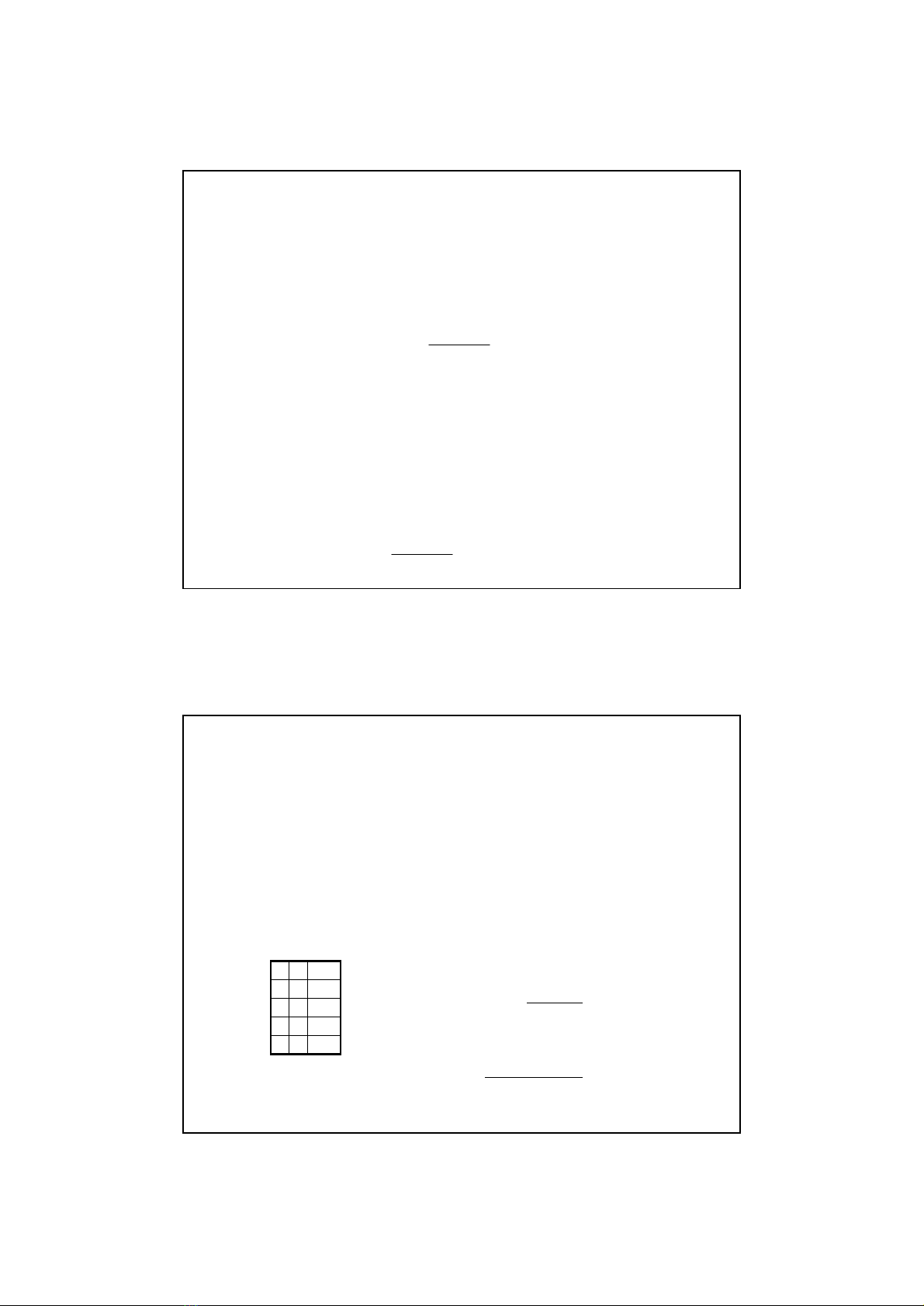
nĐổi hệ mười sang hệhai
4610 = 1011102
Hình 1. Một cách đổi hệ mười sang hệhai
0
1
46 2
23 2
11 2
5 2
2 2
1 2
0
11
0
1
1.1.1 Chuyển đổi giữa hệ mười vàhệhai (tiếp)
nĐổi sốthập phân hệ mười sang hệhai
0,12510 = 0,0012
nSốBCD (sốhệ mười mã hoábằng hệhai)
SốBCD thích hợp cho các thiếbị đo cóhiển thịsốở đầu ra.
123410 = 0001 0002 0003 0004BCD
nHệ mười sáu
123410 = 0100 1101 00102= 4D216
0,125 x 2 =
0,250 x 2 =
0,500 x 2 =
,250
,500
,000
0
0
1
3
1.2 Các phép toán sốhọc đối với hệhai
1.2.1 Phép cộng
ana(n-1) ... a2a1a0 + bmb(m-1) ... b2b1b0 = ckc(k-1) ... c2c1c0 (hệ cơ sốx)
ci = (ai + bi + (ai-1 + bi-1)%x )/x
Vídụcộng hệhai
1.2.2 Phép trừvàsốbùhai
a. Phép trừ
ana(n-1) ... a2a1a0 -b
m
b
(m-1) ... b2b1b0 = ckc(k-1) ... c2c1c0 (hệ cơ sốx)
ci = (ai –B
i-1) –b
i (nếu (ai –B
i-1) >= bivàB
i
= 0)
ci = (ai –B
i-1 + x) –b
i (nếu (ai –B
i-1) < bi vàB
i
= 1)
Vídụtrừhệhai
1101 1001
0001 1011
1111 0100
+
1101 1001
0001 1011
1011 1110
-
1.2.2 Phép trừvàsốbùhai (tiếp)
b. Sốbùhai
Ta cóthểthay phép trừbằng phép cộng: cộng sốbịtrừvới đối sốcủa sốtrừ.
Để tìm sốbùhai của một sốA ta làm theo các bước sau:
+ Biểu diễn sốA sốhệhai của nó.
+ Tìm sốbùmột (bùlogic) của số đó(đảo bít).
+ Cộng một vào sốbùmột ở trên để nhận được sốbùhai của A.
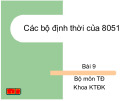
1.2.3 Phép nhân
Vídụnhân 2 sốhệhai có độ dài 4 bít
Bảng 1. Quy tắc phép nhân
a.bba
1
0
0
0
11
01
10
00
1011
0000
11
0
0
0
1
1
1
1
0
1
0
1
0
0
0
0
0
1
1
1
1
1
![Bài giảng Vi điều khiển Nguyễn Huy Hoàng: Tổng hợp kiến thức [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260316/hoatrami2026/135x160/72211773806757.jpg)
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)