PELAB - HUST
Power Electronics Laboratory
Power Electronics Laboratory - Hanoi University of Science and Technology
Thiết kế bộ điều khiển cho mạch
nghịch lưu 3 pha sử dụng
phương pháp điều chế SVM
ở chế độ độc lập
•Giảng viên hướng dẫn: PGS.TS Trần Trọng Minh
•Sinh viên thực hiện: Nguyễn Huy Hoàng : 20161680
Nguyễn Hữu Hoàng Hải : 20161299
Ngô Quang Hà : 20161225
PELAB - HUSTPELAB - HUST
Nội dung
10/17/20 2
1
2Mô phỏng
Thiết kế bộ điều khiển
PELAB - HUST
10/17/20 3
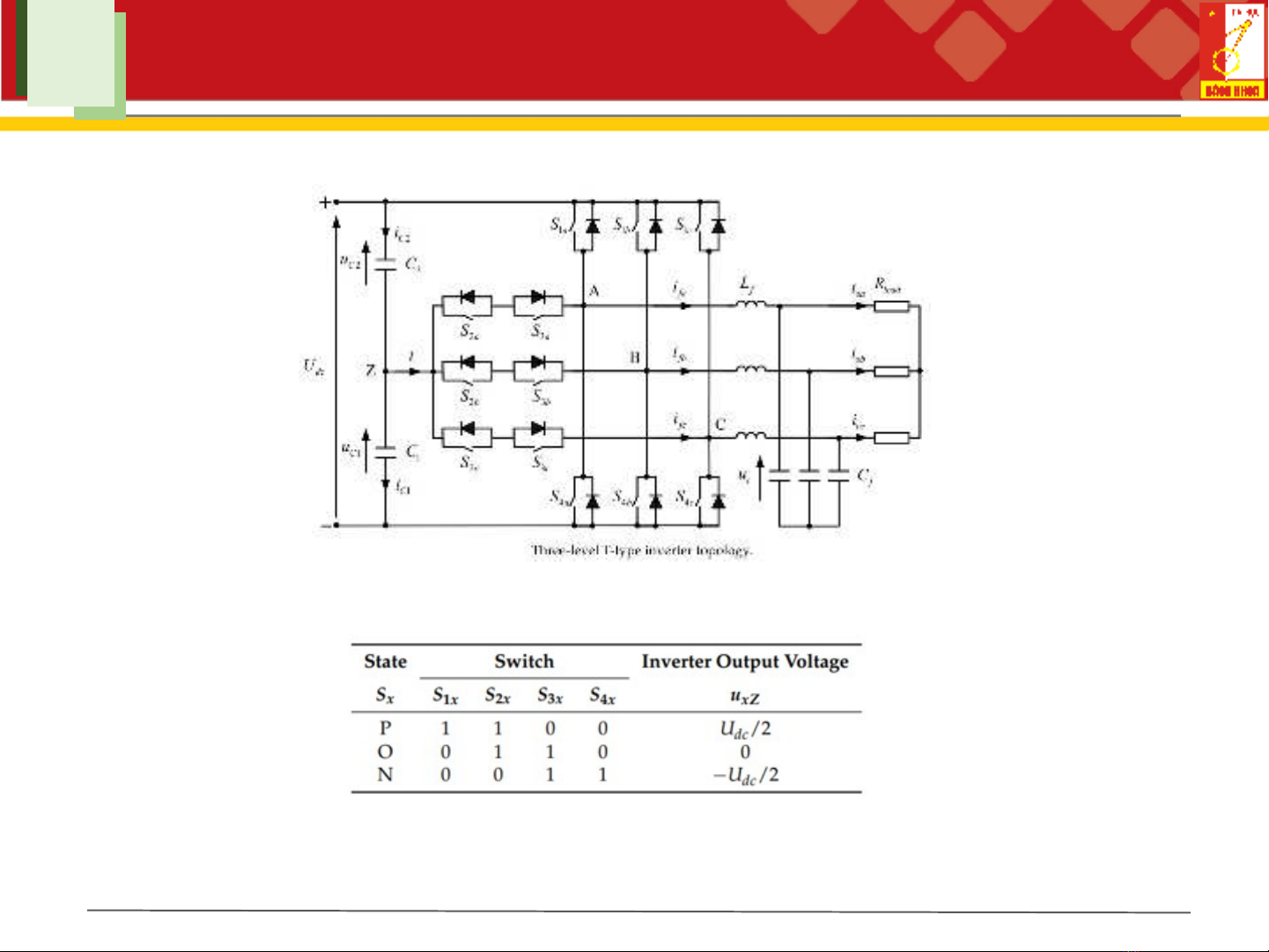
Sơ đồ cấu trúc T-type inverter
Hình 1.1. Cấu trúc T-type inverter
Hình 1.2. Trạng thái van bán dẫn và 3 mức điện áp ra
Phương pháp điều chế SVM
PELAB - HUST
10/17/20
•1
4
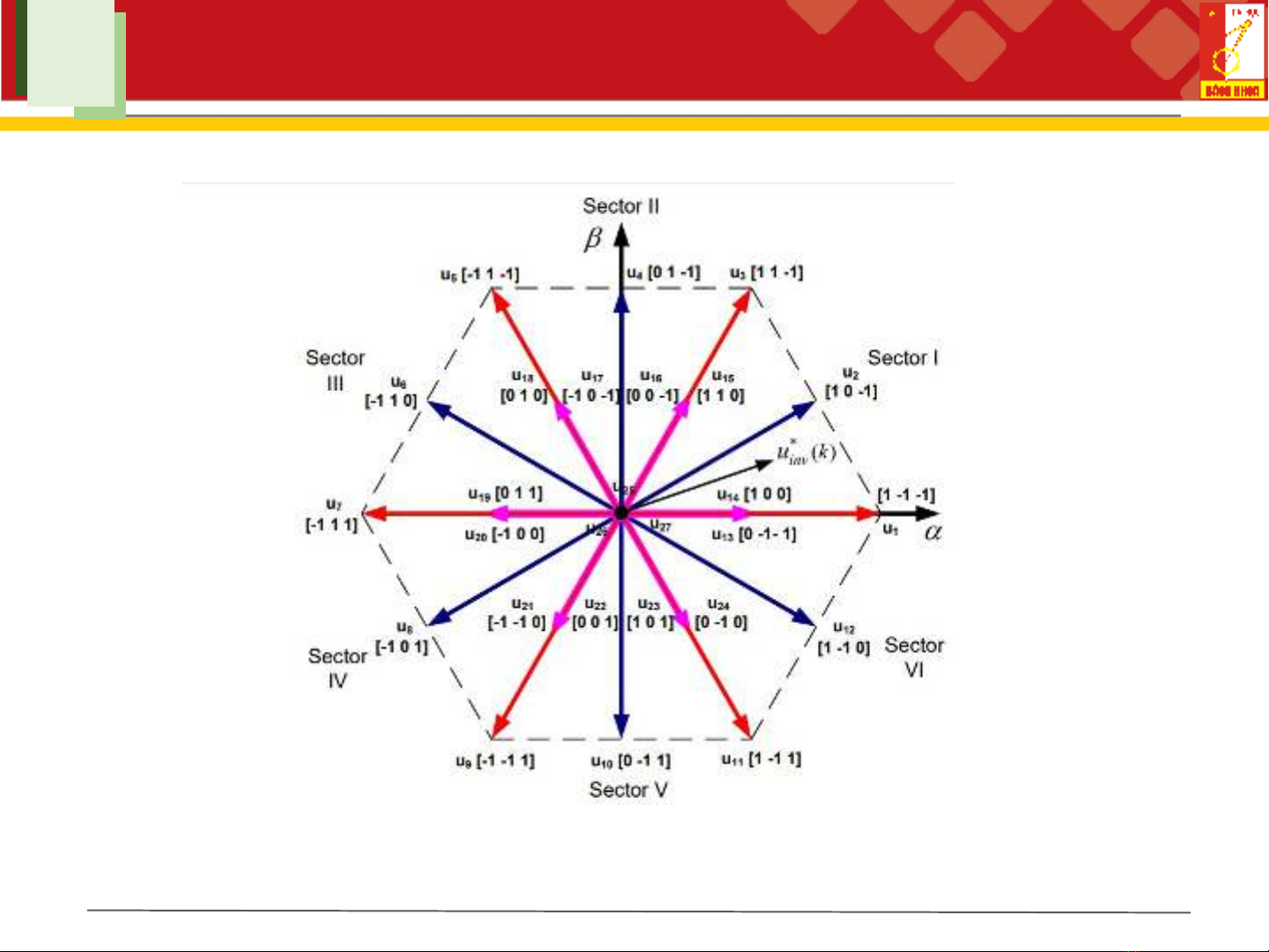
Phân Chia Và Chọn Lựa Sector Cho Bộ Nghịch Lưu 3 pha 3 mức
Hình 1.2. Các Vector điện áp nghịch lưu 3 mức
Phương pháp điều chế SVM
PELAB - HUST
10/17/20
•4
5
Cấu trúc thiết kế đối với chế độ nối lưới
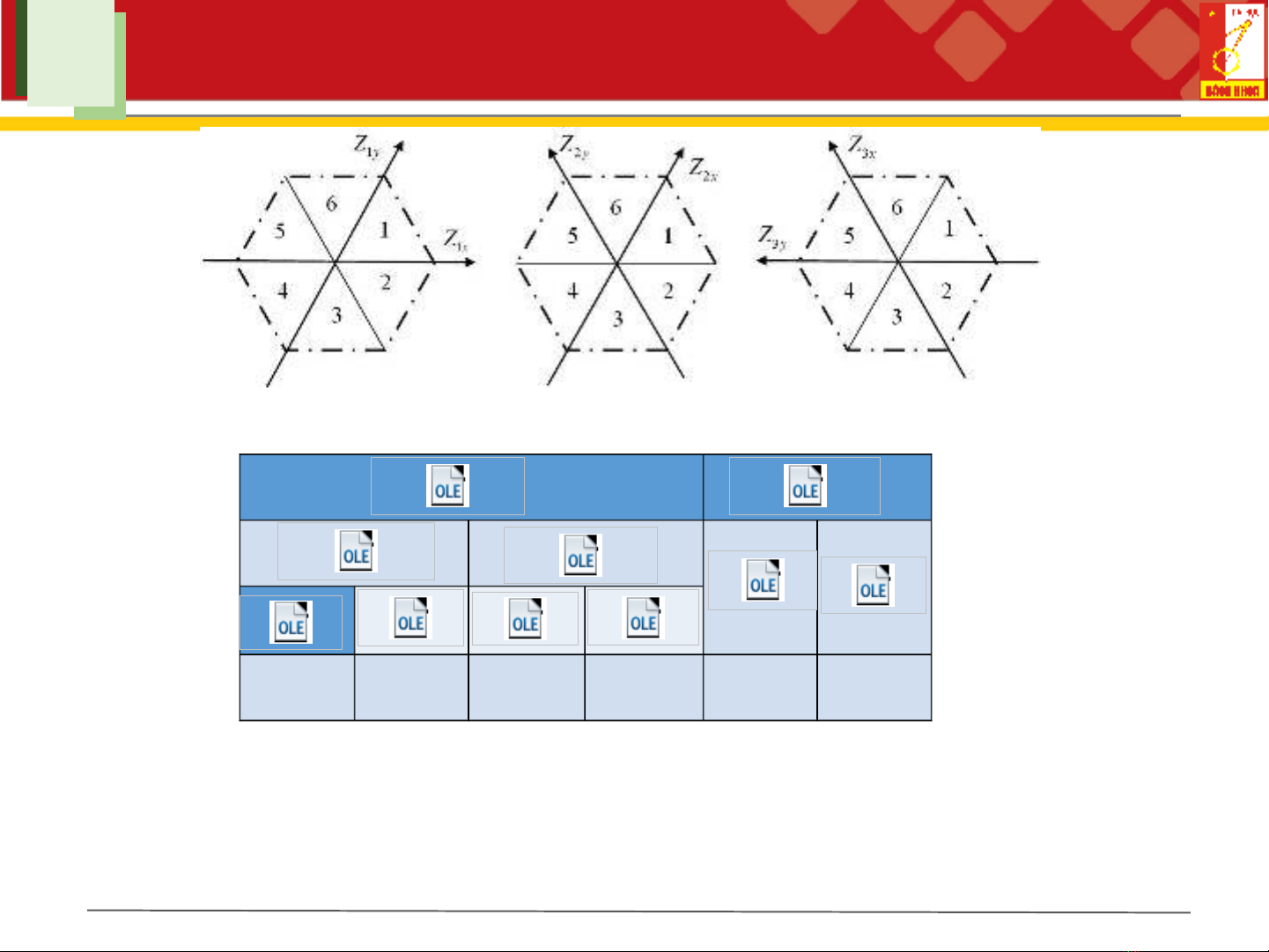
Ứng với các giá trị thu được ta xác định được vị trí vector điện áp đặt trong tam giác lớn
Sec III Sec VI Sec V Sec II Sec IV Sec I
•Xác đnh hai h s m1, m2 là t l hình chi u c a vector đi n áp đu ra mong ị ệ ố ỷ ệ ế ủ ệ ầ
mu n lên 2 vector c b n c a góc ph n sáuố ơ ả ủ ầ
ng v i các tr ng h p ta bi t đc v trí Vector đi n áp đt trong tam giác Ứ ớ ườ ợ ế ượ ị ệ ặ
nh .ỏ
1 1
. 0
x y
z z <
1 1
. 0
x y
z z
2 2
. 0
x y
z z <
2 2
. 0
x y
z z
1
0
x
z<
1
0
x
z
3
0
x
z<
3
0
x
z
2
0
x
z<
2
0
x
z













![Bộ tài liệu Đào tạo nhân viên chăm sóc khách hàng tại đơn vị phân phối và bán lẻ điện [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251001/kimphuong1001/135x160/3921759294552.jpg)

![Ngân hàng câu hỏi thi giữa kì môn Truyền động điện [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250920/kimphuong1001/135x160/42601758354546.jpg)


![Câu hỏi ôn tập Quy trình an toàn điện có đáp án [kèm đáp án chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250920/kimphuong1001/135x160/18761758354548.jpg)
![Đề thi trắc nghiệm Kỹ thuật mạch điện tử: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250920/kimphuong1001/135x160/23481758356189.jpg)


![Tài liệu ôn tập Thông tin quang [năm] [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/anvunguyen0207@gmail.com/135x160/56551758168054.jpg)

