H ĐI U KHI NỆ Ề Ể
N I DUNG BÀI GI NGỘ Ả
1. Các c ch đi u khi n chuy n đ ng ơ ế ề ể ể ộ
•Đi u khi n chuy n đ ng c c u ch p hành đi n ề ể ể ộ ơ ấ ấ ệ
•Đi u khi n chuy n đ ng c c u ch p hành khí nén, th y l c ề ể ể ộ ơ ấ ấ ủ ự
2. Đi u khi n c c u ch p hành áp đi n ề ể ơ ấ ấ ệ
• Thi t k b đi u khi n ế ế ộ ề ể
• B đi u khi n Analog ộ ề ể
• B đi u khi n s ( BĐK R le, BĐK PLC, BĐK Máy tính )ộ ề ể ố ơ
3. Đi u khi n nâng cao ề ể
• K thu t giám sát tình tr ng ỹ ậ ạ
• H th ng C đi n t trong N/M s n xu t t đ ng ệ ố ơ ệ ử ả ấ ự ộ
• Trí tu nhân t o trong C đi n t ệ ạ ơ ệ ử
• Đi u khi n m và ng d ng trong C đi n t ề ể ờ ứ ụ ơ ệ ử
H ĐI U KHI NỆ Ề Ể
I. Các c ch đi u khi n chuy n đ ngơ ế ề ể ể ộ
• H th ng c đi n t dùng c c u ch p hành hay truy n đ ng là ệ ố ơ ệ ử ơ ấ ấ ề ộ
m t ph n c a các quá trình v t lý dùng hi n th và đi u khi n .ộ ầ ủ ậ ể ị ề ể
C c u ch p hành là k t qu tác đ ng v t lý tr c ti p lên quá ơ ấ ấ ế ả ộ ậ ự ế
trình nh l y chi ti t t trong h th ng băng t i hay dùng l c tác ư ấ ế ừ ệ ố ả ự
đ ng lên quá trình. ộ
C c u ch p hành nh n tín hi u công su t th p truy n đ n máy ơ ấ ấ ậ ệ ấ ấ ề ế
tính và s n sinh ra tín hi u công su t cao tác đ ng vào trong quá ả ệ ấ ộ
trình.
Có nhi u lo i thi t b ch p hành, th ng s d ng nh c c u ề ạ ế ị ấ ườ ử ụ ư ơ ấ
ch p hành đi n t (solenoid), đi n th y l c(electrohydralic), đ ng ấ ệ ừ ệ ủ ự ộ
c DC và Đ ng c AC, Đ ng c b c ( Stepper Motor), Đ ng c ơ ộ ơ ộ ơ ướ ộ ơ
áp đi n, thi t b khí nén .ệ ế ị
H ĐI U KHI NỆ Ề Ể
1. Đi u khi n chuy n đ ng c c u ch p hành đi n .ề ể ể ộ ơ ấ ấ ệ
a) Đ ng c m t chi u ( Direct Curent Motor )ộ ơ ộ ề
•Các y u t l a chon c c u ch p hành c đi n t :ế ố ự ơ ấ ấ ơ ệ ử
+ M c đ chính xác ứ ộ
+ Đ chính xác truy n đ ng và đ phân gi i ộ ề ộ ộ ả
+ Công su t yêu c u c c u ch p hành .ấ ầ ơ ấ ấ
+ Giá thành thi t b c c u ch p hành ế ị ơ ấ ấ
• Đ ng c DC là c c u truy n đ ng thông d ng nh t trong h ộ ơ ơ ấ ề ộ ụ ấ ệ
c đi n t . Đông c DC là thi t b đi n t có đ chính xác và ơ ệ ử ơ ế ị ệ ừ ộ
đi u khi n t c đ liên t c ( vô c p) trong mi n t c đ làm vi c ề ể ố ộ ụ ấ ề ố ộ ệ
b ng các thay đ i đi n áp đ t lên đ ng c . ằ ổ ệ ặ ộ ơ
•Đ c tính mong mu n ĐC m t chi u là Momen xo n cao, Kh ặ ố ộ ề ắ ả
năng đi u khi n t c đ trong mi n r ng, Đ c tính Momen xo n ề ể ố ộ ề ộ ặ ắ
t c đ và đ c s d ng đi u khi n nhi u lo i khác nhau nh ố ộ ượ ử ụ ề ể ề ạ ư
máy công nghi p, H th ng CNC, Van Servo, Robot công nghi p ệ ệ ố ệ
H ĐI U KHI NỆ Ề Ể
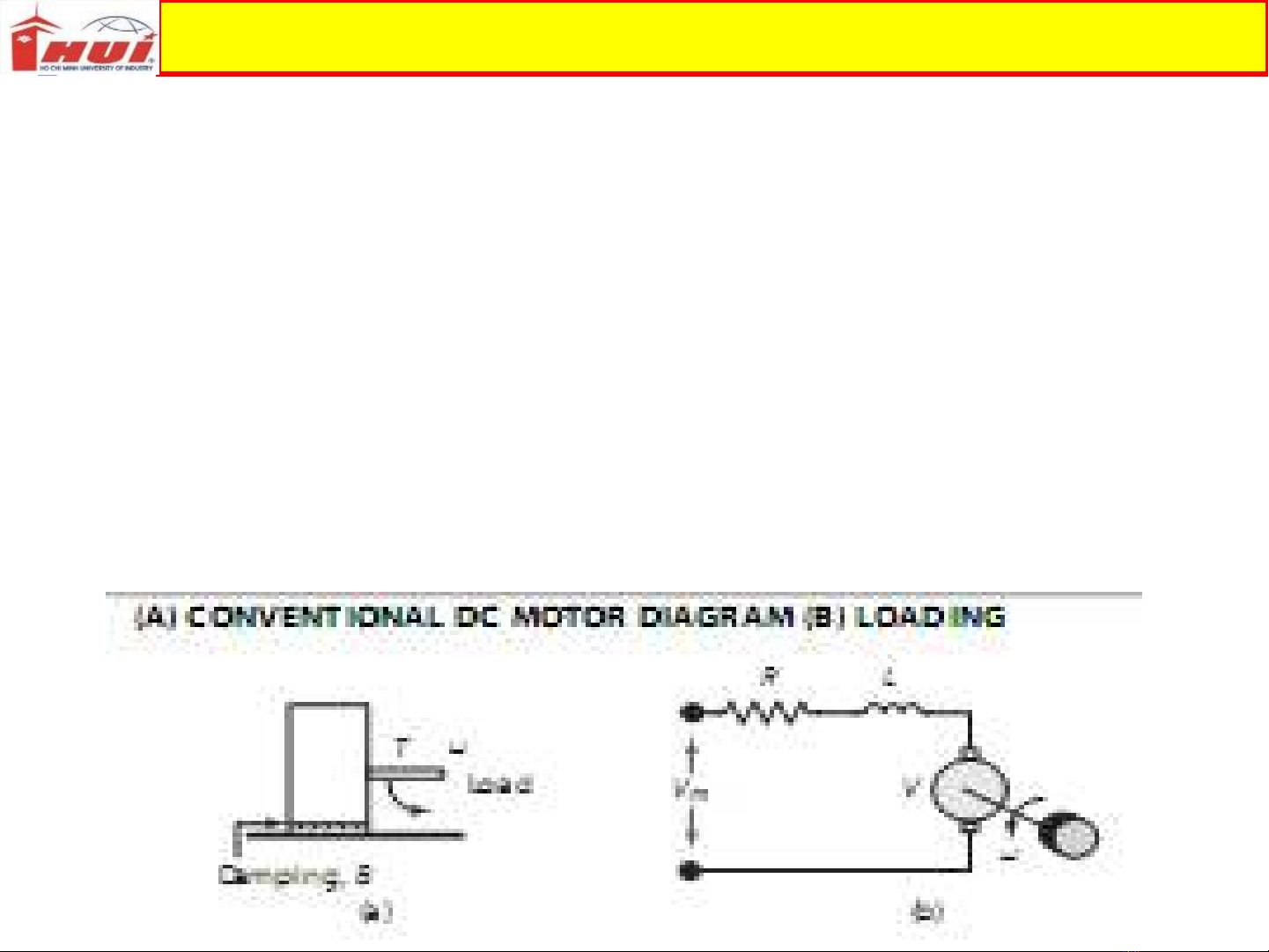
• Nguyên lý đ ng c m t chi u bi n năng l ng đi n thành ộ ơ ộ ề ế ượ ệ
chuy n đ ng quay c h c. Đ ng c m t chi u dùng nguyên lý ể ộ ơ ọ ộ ơ ộ ề
dòng đi n đ t trong t tr ng t o thành ệ ặ ừ ườ ạ l c đi n tự ệ ừ .
• Đ ng c m t chi u g m rô to dây qu n g m nhi u cu n dây ộ ơ ộ ề ồ ấ ồ ề ộ
qu n xung quanh roto có x rãnh và dòng đi n d n qua cu n dây ấ ẻ ệ ẫ ộ
roto dây qu n t c góp . Roto dây qu n đ t trong Satato dây ấ ừ ổ ấ ặ
qu n t o thành các c p c c . L c đi n t tác d ng lên các cu n ấ ạ ặ ự ự ệ ừ ụ ộ
dây c a rô to dây qu n làm quay đ ng c ủ ấ ộ ơ
• S đ đông c 1 chi u và t i tr ng ơ ồ ơ ề ả ọ
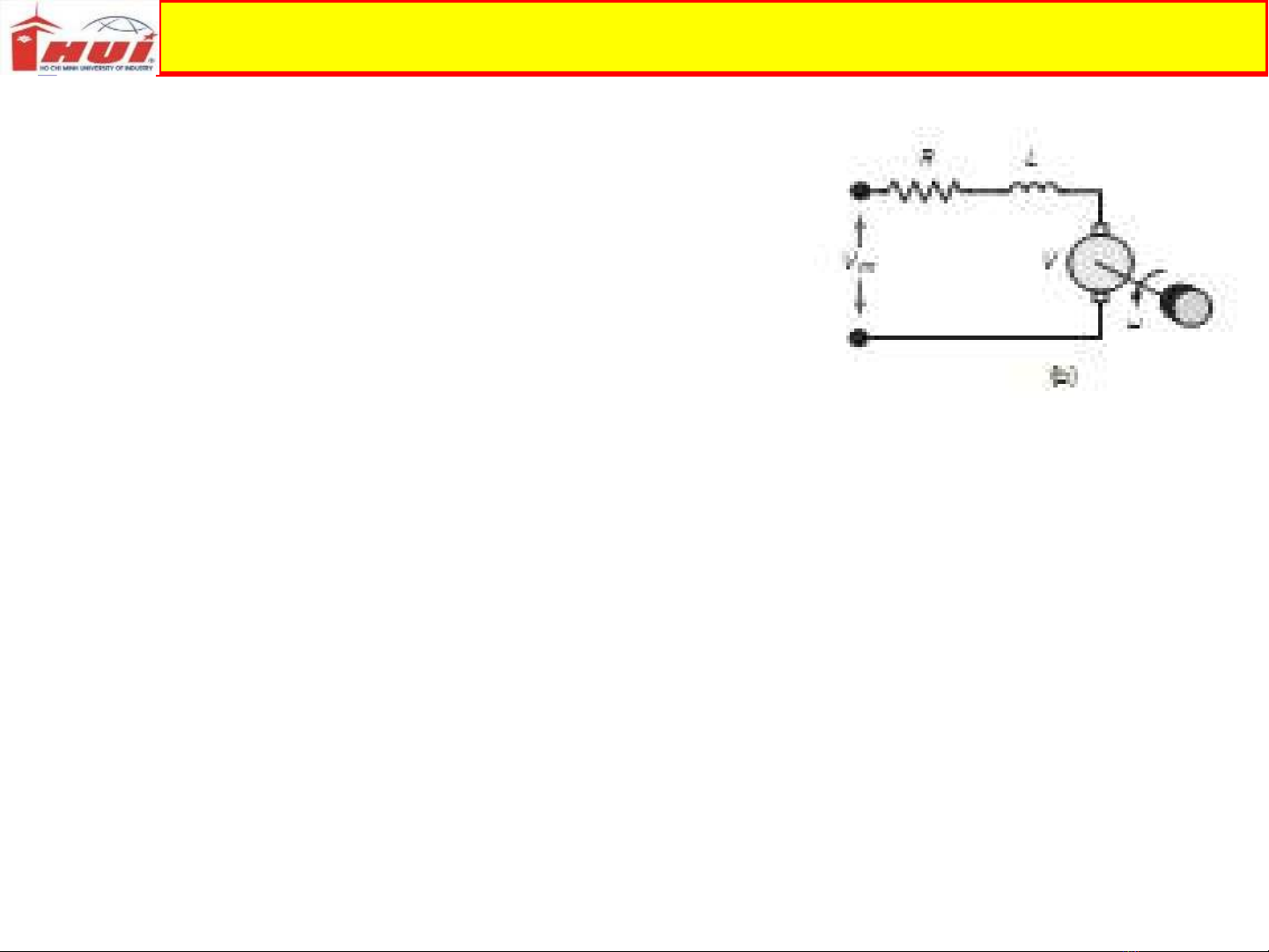
H ĐI U KHI NỆ Ề Ể
b) Mô hình toán h c c a đ ng c 1 chi u :ọ ủ ộ ơ ề
1. PT Momem xo n : ắ
IKT
t
=
2. PT Hi u đi n ệ ệ
th : ế
θ
e
KV
=
Trong đó : - T : Momen xo n trên tr c ĐC (N.m )ắ ụ
-V : Hi u đi n th ( V) ệ ệ ế
- I : C ng đ dòng đi n trong cu n dây roto ( A) ườ ộ ệ ộ
- θ : Góc quay tr c ĐC ( rad )ụ
- Kt : H s Momem xo n ( Nm/A )ệ ố ắ
- Ke : H s đi n th ( V/rad/s) ệ ố ệ ế


![Tự động hoá thiết bị điện: Giải pháp và ứng dụng [năm]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130824/print_12/135x160/4281377312260.jpg)
![Hệ giao tiếp thời gian thực: [Thêm từ mô tả/định tính để tăng CTR]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130824/print_12/135x160/6111377309105.jpg)



















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)