
ISSN 1859-1531 - TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ - ĐẠI HỌC ĐÀ NẴNG, VOL. 20, NO. 5, 2022 23
MÔ PHỎNG DAO ĐỘNG CỦA HỆ THỐNG TREO CHỦ ĐỘNG CÓ XÉT ĐẾN
SỰ ẢNH HƯỞNG CỦA CƠ CẤU CHẤP HÀNH THỦY LỰC
SIMULATION OSCILLATION OF ACTIVE SUSPENSION SYSTEM CONSIDERING
THE EFFECT OF THE HYDRAULIC ACTUATOR
Trần Thị Thu Hương
1
, Nguyễn Tuấn Anh
2
*, Nguyễn Mạnh Long1
1Trường Đại học Phenikaa
2Trường Đại học Thủy lợi
*Tác giả liên hệ: anhngtu@tlu.edu.vn
(Nhận bài: 27/2/2022; Chấp nhận đăng: 10/5/2022)
Tóm tắt - Các kích thích từ mặt đường là nguyên nhân chính gây
ra dao động cho ô tô. Để nâng cao sự ổn định và tính êm dịu, hệ
thống treo chủ động được sử dụng để thay thế hệ thống treo bị
động thông thường. Bài báo này tập trung vào việc mô phỏng và
đánh giá hiệu quả dao động của xe khi sử dụng hệ thống treo chủ
động với cơ cấu chấp hành thủy lực. Trong bài báo này, mô hình
một phần tư với xylanh thủy lực phi tuyến được xét đến. Thuật
toán điều khiển PID (Proportional – Integral – Derivative) cho hệ
SISO (Single Input – Single Output) được sử dụng để điều khiển
cho hệ thống treo, quá trình mô phỏng được thực hiện bằng phần
mềm MATLAB-Simulink. Kết quả nghiên cứu cho thấy, các giá
trị lớn nhất và giá trị trung bình của chuyển vị cũng như gia tốc
thân xe đã giảm đi rất nhiều khi hệ thống treo chủ động được sử
dụng. Do đó, độ êm dịu và tính tiện nghi của xe đã được nâng cao.
Abstract - Excitations from the road surface are the main cause of
vehicle vibrations. To improve the stability and ride comfort of the
vehicle, the active suspension system is used to replace the conventional
passive suspension system. This paper focuses on simulating and
evaluating the vibration efficiency of the vehicle when using the active
suspension system with a hydraulic actuator. In this paper, a quarter
model with nonlinear hydraulic cylinders is considered. The PID control
algorithm (Proportional – Integral – Derivative) for the SISO system
(Single Input – Single Output) is used to control the suspension system,
and the simulation process is performed by MATLAB-Simulink
software. According to the results of the paper, the maximum and
average values of vehicle body displacement and acceleration were
greatly reduced when the active suspension system was used. Therefore,
the smoothness and comfort of the vehicle have been enhanced.
Từ khóa - Hệ thống treo chủ động; cơ cấu chấp hành thủy lực;
thuật toán điều khiển
Key words - Active suspension system; hydraulic actuator;
control algorithm
1. Giới thiệu
Dao động của xe ô tô là một trong những vấn đề đang
ngày càng được nghiên cứu nhiều, đặc biệt trong những năm
gần đây. Dao động của xe có thể gây ảnh hưởng lớn tới sức
khỏe của người lái, hành khách, chất lượng hàng hóa cũng
như tuổi thọ của xe. Có nhiều nguyên nhân khiến cho xe bị
dao động, trong đó, các kích thích từ mặt đường là nguyên
nhân chủ yếu của hiện tượng này. Vì vậy, hệ thống treo được
sử dụng để điều hòa các dao động cho xe. Theo [1], hệ thống
treo chia xe thành hai phần, bao gồm: Khối lượng được treo
(toàn bộ những phần ở trên hệ thống treo) và khối lượng
không được treo (những thành phần nằm bên dưới hệ thống
treo). Hệ thống treo có ba thành phần: Lò xo, giảm chấn, tay
đòn tương ứng với ba chức năng chính của hệ thống. Trong
nhiều trường hợp đặc biệt, hệ thống treo bị động thông
thường không thể đáp ứng các yêu cầu về sự ổn định của xe.
Do đó, hệ thống treo chủ động được đề xuất để thay thế hệ
thống treo cơ khí thông thường [2].
Hệ thống treo chủ động được trang bị thêm một cơ cấu
chấp hành thủy lực ở mỗi bánh xe. Cơ cấu này có dạng
xylanh thủy lực, bên trong là hệ thống các servo-valve [3].
Khi dòng điện được cung cấp, các valve bên trong sẽ thực
hiện quá trình đóng – mở, điều này gây ra sự chênh lệch áp
suất giữa các khoang. Sự chênh lệch áp suất này sẽ gây ra
lực tác động lên cả phần khối lượng được treo và không
được treo để giảm thiểu dao động của xe [4].
1
Phenikaa University (Tran Thi Thu Huong, Nguyen Manh Long)
2
Thuyloi University (Nguyen Tuan Anh)
Thời gian gần đây, có nhiều các nghiên cứu về hệ thống
treo chủ động đã được công bố. Trong [5], tác giả đã sử
dụng mô hình một phần tư với thuật toán điều khiển PID
và LQR cho mô hình này. Tuy nhiên, mô hình đó không
xét đến ảnh hưởng của cơ cấu chấp hành thủy lực. Tương
tự, mô hình một phần tư với thuật toán điều khiển bền vững
cũng được chỉ ra trong nghiên cứu của Fu và Dong [6].
Nghiên cứu của họ cũng chưa đề cập tới sự ảnh hưởng của
xylanh thủy lực. Do đó, độ ổn định của mô hình vẫn chưa
thực sự chính xác. Trong [7, 8], các tác giả này đã kể đến
ảnh hưởng của cơ cấu chấp hành được đặt tại mỗi bánh xe.
Cơ cấu này hoạt động dựa trên tín hiệu điện áp được cung
cấp từ bộ điều khiển. Các tham số của bộ điều khiển có thể
được lựa chọn dựa trên kinh nghiệm của người thiết kế
cũng như việc sử dụng một số thuật toán thông minh để tìm
ra giá trị tối ưu của chúng [9-11].
2. Mô hình
Có nhiều phương pháp được sử dụng để xây dựng hệ
phương trình vi phân mô tả dao động của hệ thống treo. Sử
dụng phương pháp tách hệ nhiều vật, mô hình động lực học
một phần tư (Hình 1) được chia thành hai khối lượng, bao
gồm: Khối lượng được treo m1 và khối lượng không được
treo m2. Xét khối lượng được treo m1, có ba lực tác dụng
lên: Lực đàn hồi của lò xo FK, lực cản của giảm chấn FC và
lực tác động của cơ cấu chấp hành thủy lực FA. Dựa trên
nguyên lý D’Alembert, phương trình mô tả dao động theo
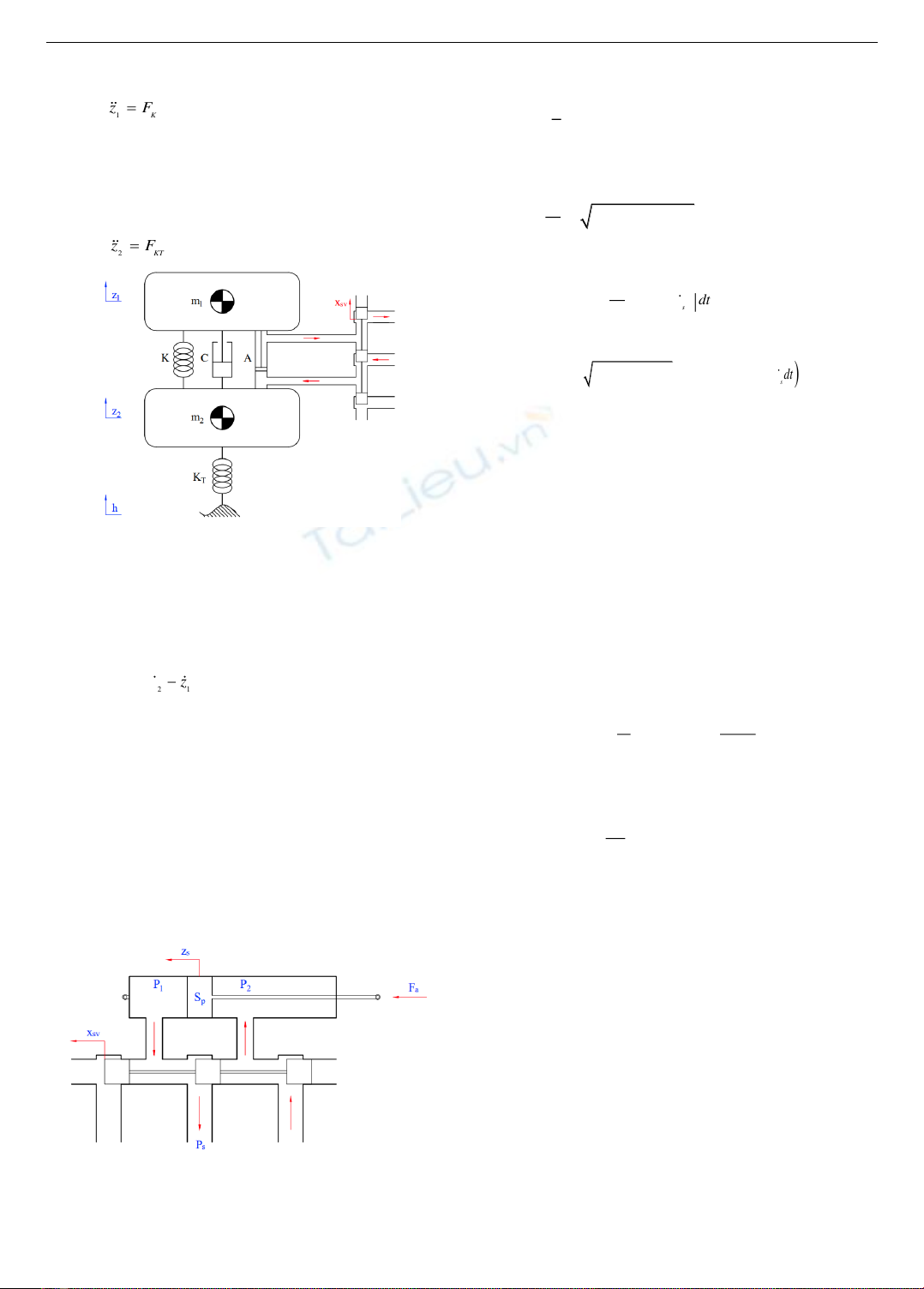
24 Trần Thị Thu Hương, Nguyễn Tuấn Anh, Nguyễn Mạnh Long
phương thẳng đứng z1 của khối lượng được treo được đưa
ra như sau:
11 K C A
m z F F F= + +
(1)
Đối với phần khối lượng không được treo m2, lực đàn
hồi của lốp xe FKT được kể tới. Thành phần giảm chấn của
lốp là vô cùng nhỏ, do đó có thể bỏ qua. Phương trình (2)
mô tả dao động theo phương thẳng đứng của khối lượng
không được treo z2.
22 KT K C A
m z F F F F= − − −
(2)
Hình 1. Mô hình hệ thống treo
Các lực liên kết có thể được xác định như sau:
Lực đàn hồi của lò xo:
( )
21K
F K z z=−
(3)
Lực cản của giảm chấn:
( )
21C
F C z z=−
(4)
Lực đàn hồi của lốp:
( )
2KT T
F K h z=−
(5)
Lực tác động được sinh ra từ cơ cấu chấp hành thủy lực
Fa phụ thuộc vào sự chênh lệch áp suất chất lỏng giữa hai
khoang và diện tích mặt cắt ngang của piston (Hình 2) [12-
14]. Giả thiết rằng diện tích mặt cắt ngang của piston ở hai
khoang là giống nhau (Sp1 = Sp2), bỏ qua thành phần lực cản
ma sát Ff giữa xylanh và piston, lực tác động Fa có thể được
xác định như phương trình (6).
2121a p p pf
F S P S P F S P−=−
(6)
Hình 2. Cơ cấu chấp hành thủy lực
Khi bộ điều khiển được cấp điện áp, các van bên trong
cơ cấu chấp hành sẽ dịch chuyển. Chính sự dịch chuyển
này tạo ra sự chênh lệch áp suất giữa các khoang. Mối liên
hệ giữa tín hiệu điện áp u(t) và độ dịch chuyển của các cửa
van xsv được đưa ra như trong phương trình (7):
( )( )
1
sv sv sv
x k u t x dt
=−
(7)
Lưu lượng chất lỏng Q thông qua các cửa van là một
hàm phụ thuộc vào sự chênh lệch áp suất
P.
( )
3
1
sv s sv
Q x P sgn x P
= −
(8)
Sự thay đổi áp suất bên trong:
2
1
1
ps
P Q P S z dt
= − −
(9)
Kết hợp các phương trình (6) (7) (8) (9), thu được:
( )
( )
3 2 1A p sv s sv p s
F S x P sgn x Pdt Pdt S z dt
= − − −
(10)
Trong đó: Sp : Diện tích mặt cắt ngang của piston.
ksv : Hệ số của servo-valve.
: Hằng số thời gian.
i : Hệ số của cơ cấu chấp hành.
Quá trình đóng mở các cửa van phụ thuộc vào tín hiệu
điện áp được cung cấp từ bộ điều khiển. Hiệu năng của hệ
thống phụ thuộc vào việc thiết kế thuật toán điều khiển sao
cho phù hợp. Trong nghiên cứu này, thuật toán PID được
đề xuất. Đây là thuật toán điều khiển tuyến tính cho hệ
SISO, thuật toán này được sử dụng rộng rãi cho nhiều hệ
thống công nghiệp ngày nay.
Gọi e(t) là sai số giữa tín hiệu đặt và tín hiệu đầu ra của
mô hình. Theo [15], tín hiệu điều khiển u(t) có thể được
xác định thông qua phương trình (11):
( ) ( ) ( ) ( )
0
1t
pD
I
de t
u t k e t e d T
T dt
= + +
(11)
Với mô hình vào – ra như trên, hàm truyền của bộ điều
khiển được viết lại dưới dạng:
( )
1
1
pD
I
R s k T s
Ts
= + +
(12)
Sau khi đã xác định được hàm truyền của bộ điều khiển,
quá trình tính toán mô phỏng sẽ được tiến hành.
3. Kết quả và thảo luận
3.1. Điều kiện mô phỏng
Quá trình mô phỏng dao động của ô tô được thực hiện
trong môi trường MATLAB-Simulink với hai trường hợp
cụ thể như trên Hình 3. Hai dạng kích thích này đều là dạng
tuần hoàn kiểu sóng sin với biên độ và tần số khác nhau.
Các kích thích này được tham khảo theo một số các nghiên
cứu trước đây [15, 16]. Sự biến đổi ở đây là tuần hoàn, do
đó, có thể dễ dàng đánh giá hiệu năng của bộ điều khiển.
( )( )
2h Asin ft mm
=+
(13)
Các thông số tham khảo của xe sử dụng cho mô phỏng
được đưa ra như trong Bảng 1. Các tham số này được lấy
từ mẫu xe SUV của phần mềm Carsim. Các thông số của
tín hiệu kích thích được đưa ra như trong Bảng 2.

ISSN 1859-1531 - TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ - ĐẠI HỌC ĐÀ NẴNG, VOL. 20, NO. 5, 2022 25
Hình 3. Mấp mô mặt đường
Bảng 1. Các thông số tham khảo
Ký hiệu
Mô tả
Giá trị
Đơn vị
m1
Khối lượng được treo
400
kg
m2
Khối lượng không được treo
45
kg
K
Độ cứng của lò xo
38000
N/m
KT
Độ cứng của lốp
180000
N/m
C
Độ cứng của giảm chấn
3100
Ns/m
Bảng 2. Các thông số của tín hiệu kích thích
Biên độ A (mm)
Tần số f (1/s)
Pha ban đầu (rad)
TH1
50
0.159
0
TH2
100
0.318
0
3.2. Kết quả mô phỏng
Kết quả mô phỏng được đưa ra ở trong hai trường hợp
dưới đây. Kết quả của bài toán này bao gồm các giá trị lớn
nhất và giá trị trung bình của chuyển vị cũng như gia tốc
của thân xe.
• Trường hợp 1:
Trong trường hợp này, kích thích mặt đường có dạng hàm
tuần hoàn được sử dụng với độ lớn của kích thích là 50 (mm).
Đồ thị Hình 4 chỉ ra sự thay đổi chuyển vị của thân xe theo
thời gian. Theo đó, thân xe sẽ dao động liên tục bám theo tín
hiệu kích thích từ mặt đường. Nếu xe chỉ sử dụng hệ thống
treo bị động, giá trị lớn nhất của dao động có thể đạt 50,65
(mm), mức này tương đương với kích thích ban đầu. Ngược
lại, giá trị này có thể giảm xuống chỉ còn 8,07 (mm) nếu hệ
thống treo chủ động được sử dụng. Giá trị trung bình của
chuyển vị khi tính theo chỉ tiêu RMS lần lượt đạt 36,40 (mm)
và 5,74 (mm) tương ứng với hai tình huống khảo sát.
Hình 4. Chuyển vị của khối lượng được treo (TH1)
Để đánh giá độ êm dịu của xe, các giá trị về gia tốc của
dao động thường được xét đến. Theo kết quả thể hiện trên
Hình 5, gia tốc cực đại của xe khi chỉ sử dụng hệ thống treo
cơ khí thông thường có thể lên tới 0,46 (m/s2). Trong khi
đó, giá trị này chỉ bằng 0,08 (m/s2), chiếm 17,39% giá trị
ban đầu nếu hệ thống treo chủ động với cơ cấu chấp hành
thủy lực được sử dụng. Các giá trị trung bình của chúng lần
lượt được tính toán theo chỉ tiêu RMS là 0,06 (m/s2) và
0,01 (m/s2). Rõ ràng, độ êm dịu của xe có thể được cải thiện
khi hệ thống treo chủ động được sử dụng để thay thế hệ
thống treo bị động thông thường.
Hình 5. Gia tốc của khối lượng được treo (TH1)
• Trường hợp 2:
Trong trường hợp thứ hai, kích thích từ mặt đường có
biên độ và tần số lớn hơn so với trường hợp đầu tiên. Do
đó, dao động của xe cũng sẽ lớn hơn.
Hình 6. Chuyển vị của khối lượng được treo (TH2)
Theo Hình 6, chuyển vị lớn nhất mà thân xe có thể đạt
được tương ứng với hai trường hợp khảo sát lần lượt là
15,58 (mm) và 105,39 (mm). Giá trị trung bình của dao
động khi xe sử dụng hệ thống treo chủ động với thuật toán
điều khiển PID cũng nhỏ hơn so với tình huống còn lại, chỉ
bằng 10,31%.
Tương tự như trường hợp đầu tiên, gia tốc của thân xe
ở trường hợp này cũng thay đổi liên tục theo thời gian với
biên độ tuần hoàn (Hình 7). Độ lớn của gia tốc đạt cực đại
tại pha đầu tiên của dao động, sau đó sẽ giảm dần và ổn
định. Giá trị cực đại của gia tốc ứng với tình huống xe sử
dụng hệ thống treo cơ khí có thể đạt 1,82 (m/s2), trong khi
đó, giá trị này chỉ bằng 0,31 (m/s2) nếu hệ thống treo chủ

26 Trần Thị Thu Hương, Nguyễn Tuấn Anh, Nguyễn Mạnh Long
động được trang bị. Điều này có thể làm gia tăng độ ổn
định và tính tiện nghi của xe khi di chuyển trên đường.
Hình 7. Gia tốc của khối lượng được treo (TH2)
4. Kết luận
Kích thích từ mặt đường là nguyên nhân chủ yếu gây ra
dao động cho ô tô. Những dao động này có thể ảnh hưởng
tới sức khỏe của hành khách cũng như chất lượng hàng hóa
khi xe di chuyển trên đường. Do đó, hệ thống treo được sử
dụng để điều hòa và dập tắt những dao động không mong
muốn này. Để nâng cao độ ổn định cho xe khi di chuyển
trên đường, phương pháp sử dụng hệ thống treo chủ động
với cơ cấu chấp hành thủy lực được đề xuất.
Theo kết quả của nghiên cứu, các giá trị về chuyển vị
và gia tốc của thân xe đã giảm đáng kể khi xe sử dụng hệ
thống treo chủ động để thay thế hệ thống treo cơ khí thông
thường. Ở cả hai trường hợp khảo sát, hệ thống treo chủ
động đều cho thấy sự ổn định và khả năng đáp ứng. Do đó,
độ êm dịu của xe đã được cải thiện tốt hơn.
Thuật toán PID được sử dụng trong nghiên cứu phù hợp
với những hệ tuyến tính. Trong tương lai, các nghiên cứu
về thuật toán điều khiển phi tuyến cho hệ thống treo chủ
động có thể được thực hiện.
TÀI LIỆU THAM KHẢO
[1] Tang, G., et al., “Sprung Mass Identification of Suspension in a
Simplified Model”, SAE Technical Paper, 2014.
[2] Marcu, S., et al., “Model for the Study of Active Suspensions”, IOP
Conference Series: Materials Science and Engineering, 2017.
[3] Tamburrano, P., et al., “A Review of Electro-hydraulic Servo-valve
Research and Development”, International Journal of Fluid Power,
vol. 20, no. 1, 2019, pp. 53-98.
[4] Riduan, A. F. M., et al., “Review on Active Suspension System”,
SHS Web of Conference, vol. 49, 2018.
[5] Anh, N. T., “Control an Active Suspension System by using PID and
LQR Controller”, International Journal of Mechanical and
Production Engineering Research and Development, vol. 10, no. 3,
2020, pp. 7003-7012.
[6] Fu, Z. J., Dong, X. Y., “H Optimal Control of Vehicle Active
Suspension Systems in Two Time Scales”, Automatika, vol. 62,
no. 2, 2021, pp. 284-292.
[7] Nguyen, T. A., “Improving the Comfort of the Vehicle Based on
using the Active Suspension System Controlled by the Double-
integrated Controller”, Shock and Vibration, vol. 2021, 2021.
[8] Guevara, D. R., et al., “Active Suspension Control using an MPC-
LQR-LPV Controller with Attraction and Quadratic Stability
Conditions”, Mathematics, vol. 9, 2021.
[9] Chen, S., et al., “A Novel LQG Controller of Active Suspension
System for Vehicle Roll Safety”, International Journal of Control,
Automation and Systems, vol. 16, no. 5, 2018, pp. 2203-2213.
[10] Bai, R., Guo, D., “Sliding-mode Control of the Active Suspension
System with the Dynamics of a Hydraulic Actuator”, Complexity,
vol. 2018, 2018.
[11] Chao, C. T., et al., “A GSA-based Adaptive Fuzzy PID-controller
for an Active Suspension System”, Engineering Computations,
vol. 33, no. 6, 2016.
[12] Tamburrano, P., et al., “A Review of Electro-Hydraulic Servovalve
Research and Development”, International Journal of Fluid Power,
vol. 21, no. 1, 2019, pp. 53-98.
[13] Huang, Y., et al., “Approximation-Free Control for Vehicle Active
Suspensions With Hydraulic Actuator”, IEEE Transactions on
Industrial Electronics, vol. 65, no. 9, 2018, pp. 7258-7267.
[14] Tan, H. S., Bradshaw, T., “Model Identification of an Automotive
Hydraulic Active Suspension System”, Proceedings of the American
Control Conference, 1997, pp. 2920-2924.
[15] N. D. Phước, Cơ sở lý thuyết điều khiển tuyến tính, Nhà xuất bản
Bách khoa Hà Nội, 2020.

![Tài liệu học tập Hệ thống điều khiển điện - khí nén và thủy lực [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20211005/conbongungoc09/135x160/811633401135.jpg)
![Tính chọn lắp ghép tiêu chuẩn giữa áo trục và trục chân vịt tàu thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210219/caygaocaolon10/135x160/5291613732560.jpg)

![Thiết kế tuyến hình tàu: Phần [Mô tả chi tiết/Hướng dẫn/Kinh nghiệm]](https://cdn.tailieu.vn/images/document/thumbnail/2016/20160930/nguyenduynam1092/135x160/2831475211567.jpg)


![Danh mục thiết bị tối thiểu dạy nghề điện tàu thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151208/thuyhuynh1702/135x160/3601449570530.jpg)

![Đề cương Khí nén & Thủy lực [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20150811/nguyenvantien1409/135x160/2133770373.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)