
Mô phỏng và thiết kế Hexapod cho gia công cơ khí chính xác
Phạm Văn Bạch Ngọc, Vũ Thanh Quang, Đỗ Trần Thắng, Phạm Anh Tuấn
Phòng Cơ điện tử, Viện Cơ học-264 Đội Cấn, Hà Nội
E-mail: mechatronics@hn.vnn.vn
Tóm tắt: Trên thế giới, Rôbốt cơ cấu song song ngày
càng được ứng dụng rộng rãi trong nhiều lĩnh vực
như: cơ khí chính xác, vũ trụ, y tế, lắp ráp trong sản
xuất,.... Ở Việt Nam, việc nghiên cứu Rôbốt cơ cấu
song song đã được chú ý từ năm 2000. Nhiều cơ sở
nghiên cứu, cơ sở sản xuất đã có những nghiên cứu
cơ bản và bước đầu triển khai chế tạo Rôbốt song
song.
Bài báo này trình bày các bước từ lựa chọn mô hình,
mô phỏng động lực học và tính toán thiết kế để chế
tạo một Rôbốt cơ cấu song song (Hexapod) cụ thể
ứng dụng trong gia công cơ khí . Các máy công cụ
truyền thống sau khi thêm bộ đồ gá vạn năng
(Hexapod) có thể gia công được những chi tiết có bề
mặt phức tạp mà trước đây không thực hiện được.
Đây là một giải pháp phù hợp cho việc nâng cấp các
máy công cụ truyền thống hiện đang được sử dụng
rất nhiều tại các cơ sở gia công cơ khí chính xác
trong nước, nhằm chế tạo ra các sản phẩm đáp ứng
được những đòi hỏi ngày càng cao của thị trường.
1 Đặt vấn đề
Các dạng sản phẩm có hình dáng phức tạp đòi hỏi độ
chính xác cao, ngày càng được sử dụng rộng rãi như:
• Khuôn mẫu có dạng trụ tròn
• Biên dạng cam để điều khiển
• Khuôn mẫu đột, dập
• Khuôn ép nhựa dùng cho sản xuất quạt điện
Hình 1. Một số dạng chi tiết
Hiện nay, các cơ sở gia công cơ khí tại các nhà máy,
trung tâm sản xuất vẫn còn sử dụng nhiều máy công
cụ truyền thống. Với các máy công cụ này, việc gia
công chế tạo các sản phẩm trên rất khó có thể thực
hiện được. Có 2 giải pháp được đặt ra:
• Trang bị các máy CNC hiện đại thay thế các máy
công cụ hiện có.
• Cải tiến máy công cụ hiện có.
Đặc điểm của máy công cụ truyền thống
Các máy công cụ truyền thống hoạt động theo nguyên
tắc nhiều trục chính để điều khiển chuyển động tạo
hình cắt trong quá trình gia công. Những máy công cụ
này thường chỉ có tới 3 chuyển động phối hợp (2
chuyển động đồng thời) vì vậy hạn chế rất nhiều về
khả năng tạo hình các sản phẩm có hình dạng phức
tạp thay đổi trong không gian 3 chiều.
Hình 2. Máy phay truyền thống
Nhận xét: Qua khảo sát thực tế sản xuất cũng như nhu
cầu của thị trường trong việc gia công chế tạo các sản
phẩm có hình dạng phức tạp và đòi hỏi độ chính xác
cao, nhóm nghiên cứu đề xuất giải pháp ứng dụng
Rôbốt cơ cấu song song trong gia công cơ khí sẽ được
trình bày cụ thể ở phần sau.
2 Rôbốt song song trong gia công cơ khí
Khả năng ứng dụng Rôbốt song song trong gia công
cơ khí dựa vào các ưu điểm sau:
• Bề mặt tấm đế di động của Rôbốt có thể chuyển
động tự do trong không gian một cách linh hoạt.
Vì vậy việc tạo hình bề mặt được thực hiện dễ
dàng hơn và đạt yêu cầu về độ chính xác cao hơn.
• Kết cấu động học của Rôbốt song song có độ
cứng vững cao và chịu được tải trọng lớn mặc dù
kích thước Rôbốt nhỏ.
• Có thể chế tạo theo kiểu modul hoá, có nhiều chi
tiết giống hệt nhau về cấu tạo và vai trò.
Qua tìm hiểu về khả năng ứng dụng Rôbốt song song
trong gia công cơ khí, nhóm nghiên cứu đưa ra 4
phương án ứng dụng, đánh giá và lựa chọn phương án
thích hợp:
Phương án 1: Hexapod trong vai trò máy gia công
Bộ đầu dao được gắn trên
tấm đế di động của Rôbốt. 7
chuyển động cần được điều
khiển đồng thời khi gia công,
bao gồm: 6 chuyển động của
Rôbốt và một chuyển động
cắt của dụng cụ cắt.
Phương án 2: Tripod trong vai trò máy gia công
Bộ đầu dao được gắn trên
tấm đế di động. 4 chuyển
động cần được điều khiển
đồng thời khi gia công. Tuy
nhiên để làm tăng cứng
vững hệ thống và hạn chế
các bậc tự do thừa, mô hình
này cần phải thêm cơ cấu
phụ, hoặc thay đổi cấu trúc
của các khớp.
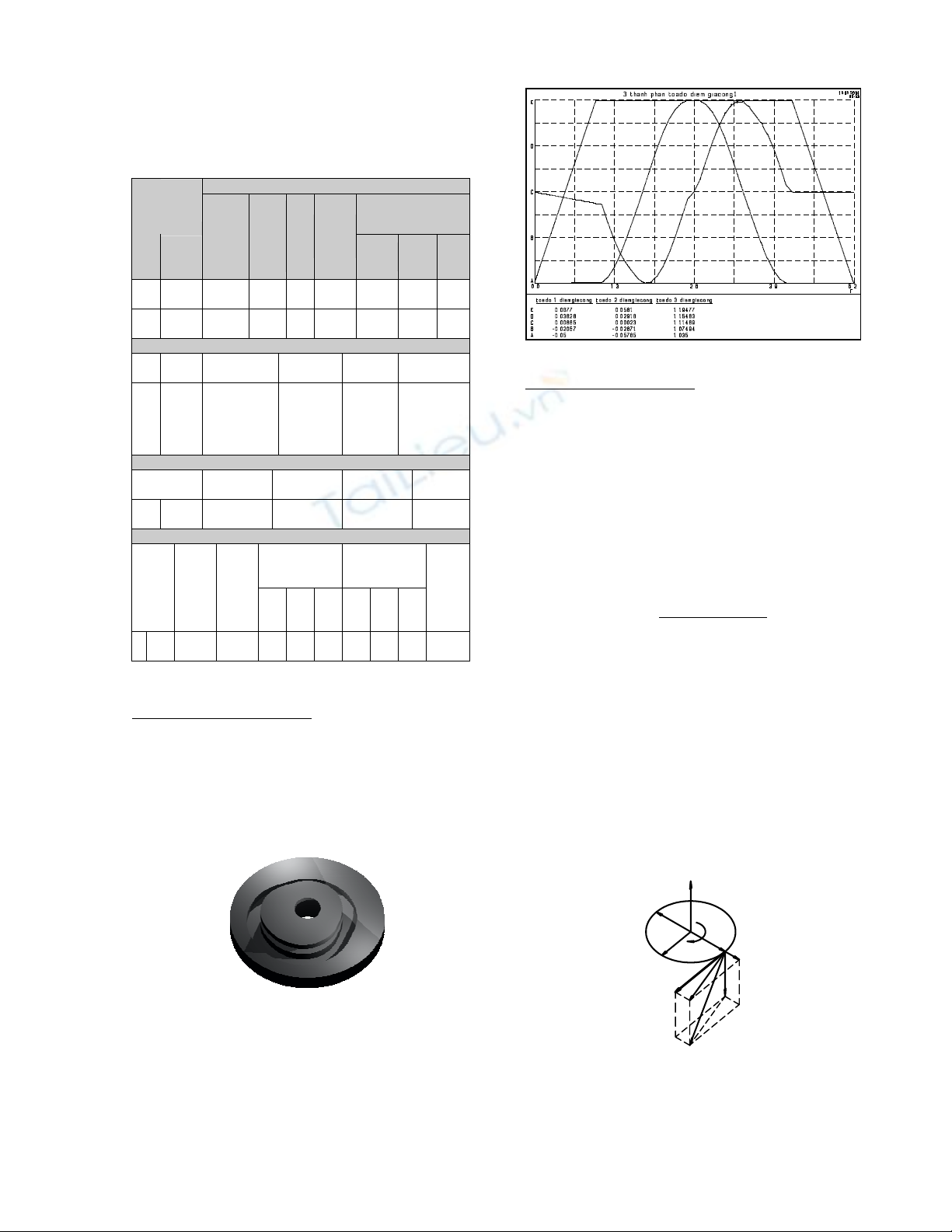
Phương án 3: Hexapod trong vai trò đồ gá vạn năng
lắp trên máy công cụ
Phôi được gắn trên tấm đế di động của Rôbốt. 7
chuyển động cần được điều khiển đồng thời trong quá
trình gia công, bao gồm: 6 chuyển động của Rôbốt và
một chuyển động độc lập của đầu dao. Có 2 phương
án: Rôbốt là bàn gá chuyên dụng và Rôbốt gá trên
bàn dao như hình vẽ Hình 5.
Phương án 4: Tripod trong vai trò đồ gá vạn năng
lắp trên máy công cụ
Phôi gắn trên tấm đế di động
của Rôbốt. 4 chuyển động cần
được điều khiển đồng thời
trong quá trình gia công, bao
gồm: 3 chuyển động của
Rôbốt và một chuyển động
độc lập của dao cắt. Tuy nhiên
cũng giống như phương án 2
cần thêm các cơ cấu phụ tăng
cứng vững và hạn chế các bậc
tự do thừa.
Để phù hợp với điều kiện ứng dụng tại Việt Nam, các
chỉ tiêu sau được lựa chọn để đánh giá tính khả thi
của các phương án:
• Phương án được lựa chọn phải đơn giản trong
việc điều khiển
• Kết cấu của Rôbốt đảm bảo độ cứng vững cao.
• Có thể ứng dụng phổ biến trong sản xuất và phù
hợp với nhu cầu ứng dụng của các đơn vị sản
xuất hiện tại.
Đánh giá các phương án
4 phương án đề xuất đã được lựa chọn và đánh giá
theo bảng sau:
STT Chỉ tiêu
đánh giá
Phươn
g
án 1
Phươn
g
án 2
Phương
án 3
Phươn
g
án 4
1 Điều khiểnRất
phức tạp
Phức
tạp Phức tạpPhức tạp
2 Kết cấu Phức tạp Phức
tạp
Đơn giản
hơn Phức tạp
3
Độ cứng
vững của
kết cấu
Cứng
vững
Nên có
phần trợ
lực
Cứng
vững
Nên có
phần trợ
lực
4
Khả năng
chuyển
động của
bề mặt tấm
đế di động
Linh
hoạt
Kém
linh
hoạt
Linh hoạtKém
linh hoạt
5 Khả năng
ứng dụng Rộng Khá
rộng
Rộng
( thể hiện
2 vai trò
gá đặt và
tạo hình)
Hẹp hơn
Bảng 1. So sánh giữa các phương án
K ết luận:
Với điều kiện sản xuất tại Việt Nam, việc chế tạo một
Rôbốt song song chuyên dụng cho gia công cơ khí
(vai trò là máy gia công) sẽ gặp khó khăn về cả khả
năng chế tạo và khả năng ứng dụng. Một giải pháp
khả thi là sử dụng Rôbốt song song trong vai trò đồ
gá vạn năng lắp trên các máy công cụ để nâng cao
khả năng sử dụng của các máy công cụ truyền thống
→ Chọn phương án 3.
3 Mô phỏng Hexapod trong vai trò đồ gá vạn
năng lắp trên máy công cụ phục vụ gia công cơ
khí chính xác
3.1 Nguyên lý chung [2], [3], [4]
Bài toán động học
Phương trình động học của Rôbốt:
x = f(q) (1)
Trong đó:
• x : quỹ đạo chuyển động của Rôbốt trong không
gian
Đồ gá
vạn năng
Hình 5. Phư
ơ
n
g
án 3 (Rôbốt
g
á t
r
ên bàn
g
á)
Hình 4. Phư
ơ
n
g
án 2
Hình 6. Phương án 4
Hình 3. Phư
ơ
n
g
án 1
• q: toạ độ suy rộng của Rôbốt
Với quỹ đạo chuyển động (x) cho trước của Rôbốt ta
xác định được toạ độ suy rộng q của Rôbốt với
phương trình:
q = f -1(x) (2)
Với toạ độ suy rộng q được xác định bởi phương trình
(2) ta có thể tính được vận tốc q
&, và gia tốc q
&& .
Bài toán động lực học Rôbốt
Bài toán động lực học Rôbốt được mô tả theo phương
trình Lagrange II:
a
Q
c
q
b
q
abc
b
q
ab
g=Γ+ &&&& (3)
Trong đó:
• q : Toạ độ suy rộng Rôbốt
• Qa : Lực suy rộng
• gab : Ma trận khối lượng suy rộng
• abc
Γ: Các lực Coriolis và lực ly tâm suy rộng
Từ bài toán động học theo phương trình (2) ta tìm
được q
&, q
&& thế vào phương trình (3) sẽ xác định
được Qa
Từ giá trị Qa tìm các thông số động cơ (chế độ điều
khiển) cho Rôbốt được tính.
3.2 Tính toán động lực học
a) Chương trình mô phỏng alaska [1]
Đối tượng mô phỏng của chương trình alaska là cơ
hệ nhiều vật. Với nhiều tính năng từ phân tích, giải
các bài toán tuyến tính, bài toán phi tuyến, hiển thị
được các kết quả mong muốn, … rất phù hợp để mô
phỏng Rôbốt cơ cấu song song.
alaska có các chức năng chính sau:
• Lập phương trình chuyển động phi tuyến.
• Giải các phương trình chuyển động phi tuyến, …
• Lập các phương trình tuyến tính,
• Phân tích các giá trị riêng, tìm các dạng riêng,
tính toán các tần số dao động,
• Giải các phương trình tuyến tính, …
• Tính toán và đưa ra các kết quả theo yêu cầu
• Có cơ chế mở: nhập các dữ liệu từ kết quả của
các phần mềm khác (các ma trận độ cứng, ma
trận khối lượng, … lấy ra từ các phần mềm tính
toán kết cấu, phần tử hữu hạn - NASTRAN,
ANSYS, …), do đó xây dựng được mô hình Cơ
hệ nhiều vật có các phần tử đàn hồi.
b) Các thông số đầu vào cho mô phỏng:
Thông số động học của Rôbốt
Nhóm nghiên cứu đã tiến hành mô phỏng Rôbốt song
song trong vai trò đồ gá vạn năng lắp trên bàn chạy
dao của máy phay đứng (6H11) có các thông số chính
sau:
Hình 7. Mô hình máy phay gia công 6H11
(Máy phay cỡ trung bình) Tên máy 6H11
Thông số đặc trưng của phần không chuyển động
Kích thước lớn nhất (mm)
Khối lượng
(kg) Cao (H1) Dài (L1) Rộng
(W1)
2100 2300 2060 1530
Thông số đặc trưng của bộ phận gá phôi
Trục
X
(W)
Trục
Y
(L)
Trục
Z
(H)
Hành trình (mm)
Kích thước (mm)
200 200 350
Khối
lượng
(kg)
Cao
(H2+H3)
Dài
(W3) Rộng(L3) Miền vận tốc
(mm/phút)
300 100 1000 250
35 -
205
25 -
765
12 -
380
Các loại dao và thông số
Thông số Dao đứng
Miền đường kính (mm) 4 - 20
Miền tốc độ cắt (vòng/phút) 65 - 1800
Bảng 2. Thông số chính của máy phay mặt đầu 6H11
L3
L
W2
W
W1
W3
H
H2+H3
L1
H1
Để phù hợp với máy phay trên, chúng tôi đã tính toán
và chọn ra các kích thước hình học của Rôbốt song
song như sau:
Thông số
Vị trí của tâm vật so
với gốc (mm)
STT
Tên vật
Bán kính
danh
nghĩa
(mm)
Chiều
cao
trung
bình
(mm)
Góc
lệch
(độ)
Khối
lượng
(kg) Theo
trục 1
Theo
trục 2
Theo
trục 3
1 Tấm
dưới 300 50 20 66.291 0.0 0.0 0.1
2 Tấm
trên 200 30 24 47.416 0.0 0.0
Bán kính
ngoài (mm)
Bán kính
trong (mm)
Chiều dài
(mm)
Khối lượng
(kg)
3
Động
cơ và
ống
trượt
ngoài
50 35 350 34.143
Bán kính
(mm)
Chiều dài
(mm)
Khối lượng
(kg) Vật liệu
4 Thanh
trượt 35 400 10
Vị trí tâm phôi
so với tấm trên
(mm)
Vị trí ban đầu
của phôi (mm)
Chiều
cao
(mm)
Khối
lượng
(kg) Theo
trục
1
Theo
trục
2
Theo
trục
3
Theo
trục
1
Theo
trục
2
Theo
trục
3
Chiều
dày cắt
(mm)
5 Phôi
gá 36 20 0.0 0.0 18 0.0 0.0 0.0 20
Bảng 3. Thông số của mô hình Rôbốt (Hexapod)
Quỹ đạo gia công của Rôbốt
Trong quá trình thiết kế Rôbốt song song, một số
dạng chi tiết phức tạp, yêu cầu độ chính xác cao như
các khuôn mẫu, chi tiết dạng cam (việc gia công các
chi tiết này rất khó khăn đối với cả máy CNC 5 trục)
đã được mô phỏng ... Bài báo này chỉ trình bày phần
mô phỏng quá trình gia công một chi tiết dạng cam
(Hình 8).
Trên cơ sở hình dạng, kích thước, yêu cầu về độ
chính xác của chi tiết cần gia công, kinh nghiệm gia
công, quỹ đạo gia công mà Rôbốt cần thực hiện trong
không gian theo hệ toạ độ mô tả trong Hình 10, tiến
hành xây dựng qui trình công nghệ gia công chi tiết.
Hình 9. Quỹ đạo gia công của Rôbốt
Lực cắt tác dụng lên Rôbốt
Cơ sở chính để xác định lực cắt trong quá trình mô
phỏng động lực học Rôbốt là dựa vào quy trình công
nghệ gia công chi tiết, loại dụng cụ cắt sử dụng, vật
liệu phôi, ... trên cơ sở các tài liệu chuyên ngành
Công nghệ chế tạo máy, các hệ số trong công thức
tính lực cắt (4) phù hợp với các bước, nguyên công
khi gia công cũng như các thuộc tính vật liệu, chế độ
cắt, bước chạy dao, ...của dao cắt và phôi gia công
được xác định.
Công thức tính lực cắt [5]:
MV
wq
ny
z
x
pt
zk
nD
ZBSC
P.
.
...10
= (4)
Trong đó:
• Z :số răng dao phay
• n : số vòng quay của đầu dao (vòng/ phút)
• Cp : là hệ số phụ thuộc vào vật liệu phôi và loại
dao phay
• kMV : hệ số điều chỉnh chất lượng vật liệu gia
công
• D : đường kính danh nghĩa của dao phay
• SZ : lượng chạy dao răng
Hình 10. Các thành phần lực cắt so với
hệ trục cố định
F2 F3
0.5Ddao
nc
3
2
1
Ft
F1
Hình 8. Chi tiết cần gia công
Các số mũ x, y, q, w là các hệ số phụ thuộc vào loại
dao, vật liệu gia công và vật liệu làm dao, ... được tra
trong các tài liệu chuyên ngành về Chế tạo máy [9].
Hình 11. Lực cắt khi gia công chi tiết (Hình 6)
Phương của lực cắt thay đổi theo thời gian thoả mãn
trục dao luôn vuông góc với bề mặt tấm đế di động.
c) Các bước mô phỏng
Các dữ liệu đầu vào cho việc mô phỏng động lực học
Rôbốt (Hexapod) là:
• Thông số hình học Rôbốt
• Quỹ đạo gia công của Rôbốt
• Lực cắt trong quá trình gia công
Việc mô phỏng Rôbốt (Hexapod) được tiến hành theo
các bước sau:
• Xây dựng mô hình Rôbốt với phần mềm alaska
• Lập quỹ đạo chuyển động (x) của Rôbốt cần thực
hiện trong không gian.
• Giải bài toán ngược động học theo quỹ đạo
chuyển động thực của Rôbốt trong không gian để
xác định toạ độ suy rộng của Rôbốt qi, vận tốc q
&
và gia tốc q
&& .
• Giải bài toán động lực học Rôbốt từ đó xác định
lực suy rộng (Qi) để tính toán các thông số động
cơ phục vụ điều khiển Rôbốt.
Hình 12. Sơ đồ các bước mô phỏng được thực hiện
Trong thực tế khi mô phỏng, bài toán động học và
động lực học được giải đồng thời trong cùng môi
trường mô phỏng. Kết quả từ bài toán động học là
thông số đầu vào của bài toán động lực học và kết quả
cuối cùng của mô hình động lực học (phản lực Qi, tại
các khớp) phục vụ bài toán điều khiển.
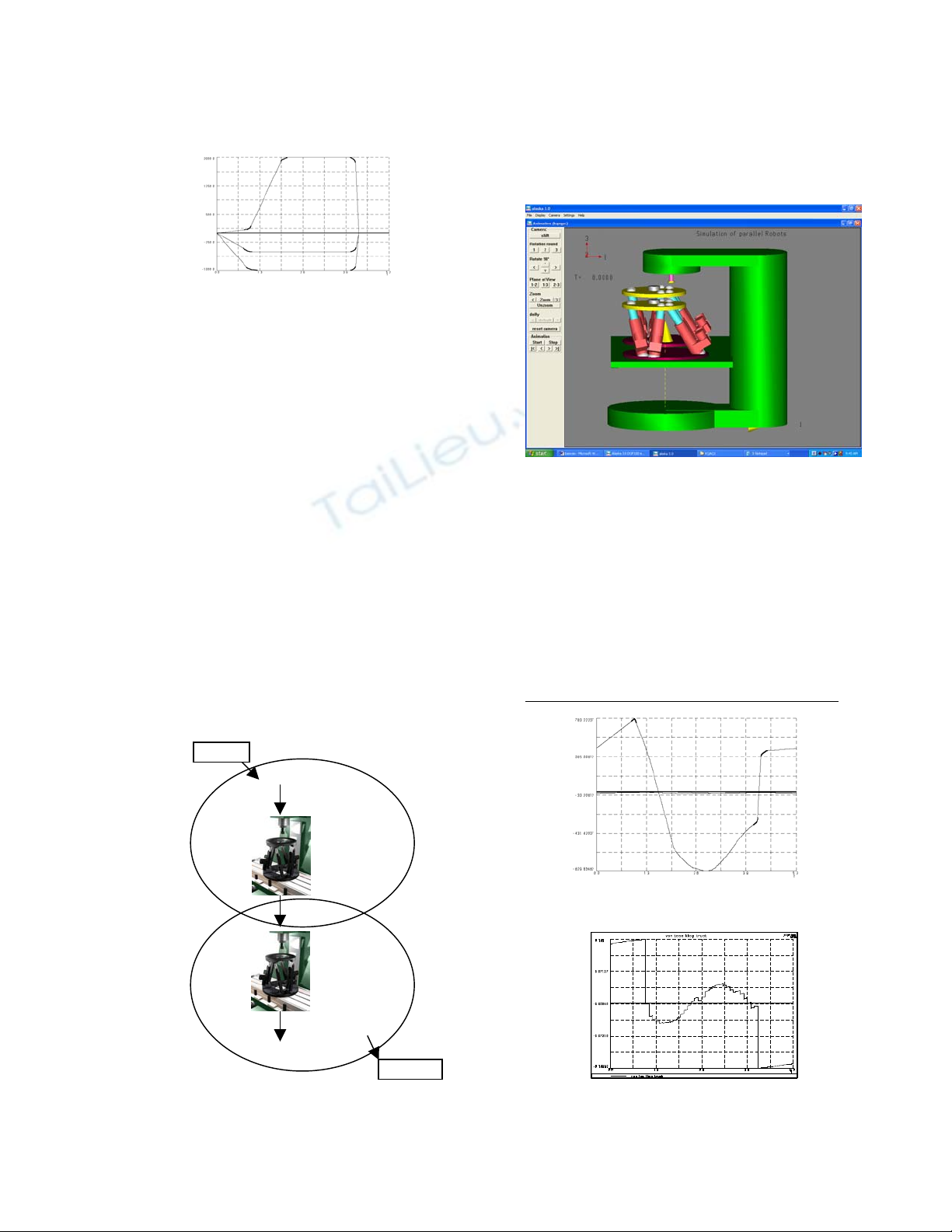
Hình 13. Mô hình Hexapod trên chương trình alaska
d) Kết quả mô phỏng:
Mô hình Rôbốt song song được xây dựng trên chương
trình alaska. Sau khi tiến hành mô phỏng, tính toán
động lực học, các kết quả sau được đưa ra nhằm phục
vụ cho bài toán điều khiển Rôbốt:
1. Các phản lực tại các khớp trượt
2. Khoảng dịch chuyển qi của các khớp trượt
3. Vận tốc q
&, và gia tốc q
&& của các khớp trượt
Một số kết quả mô phỏng bằng phần mềm alaska:
Hình 14. Phản lực của một khớp trượt trong quá trình
gia công
Hình 15. Vận tốc của một khớp trượt
x
qi
Qi
Động học
Động lực học
Quỹ đạo
chuyển động
Toạ độ Rôbốt
Lực tại các khớp
AUTOCAD
Điều khiển





![Giáo trình mô hình hóa - Chương 5: [Nội dung cụ thể của chương 5 để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111009/hoathietmoclan/135x160/pages_from_mo_hinh_hoa_he_truyen_dong_dien_8031_6_3594.jpg)


![Giáo trình mô hình hóa - Chương 2: [Mô tả cụ thể nội dung chương để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111009/hoathietmoclan/135x160/pages_from_mo_hinh_hoa_he_truyen_dong_dien_8031_3_0247.jpg)






![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)