Tuyển tập Hội nghị Khoa học thường niên năm 2024. ISBN: 978-604-82-8175-5
89
PHÁT HIỆN BỆNH LÁ
BẰNG MÁY BAY KHÔNG NGƯỜI LÁI
Trần Anh Đạt, Trần Thị Hiền Tiên
Trường Đại học Thủy lợi
Nghiên cứu này áp dụng mô hình mạng
nơ-ron tích chập với quy trình chuyển đổi đa
giai đoạn 56ms. Kết quả của chúng tôi cho
thấy phương pháp đề xuất có thể vượt trội so
với một số phương pháp tiên tiến nhất trên tập
dữ liệu 1000 hình ảnh tự thu thập được chụp
bởi UAV. Kết quả thử nghiệm cho thấy thời
gian dự đoán thực tế có thể đạt 56ms với kiến
trúc CNN EfficientNet-Lite-B9-v3. Nghiên
cứu này cung cấp một nền tảng vững chắc cho
việc xây dựng hệ thống phát hiện bệnh lá.
1. GIỚI THIỆU
Việc phát hiện bệnh lá rất thách thức do sự
phức tạp của các mẫu hình ảnh. Điều này dẫn
đến nhu cầu ngày càng tăng về phân tích cụ
thể và phức tạp của các dấu hiệu trên lá.
Chúng tôi dự định sử dụng dữ liệu thu được
từ phương tiện bay không người lái (UAV)
để phát hiện sâu bệnh vì tính hiệu quả, chính
xác, khả năng tiếp cận và chi phí hiệu quả
của nó. Trên thực tế, trong các cánh đồng lớn
có mật độ cây trồng cao, việc sử dụng các
thiết bị tầm gần có ưu điểm là độ chính xác
cao, nhưng lại quá tốn công sức, chi phí cao
và mất thời gian lắp đặt. Phương tiện bay
không người lái có thể được triển khai và vận
hành dễ dàng trên một khu vực rộng lớn.
Trong bài báo này, chúng tôi đề xuất một
phương pháp dựa trên hai mô hình CNN và
một module trích xuất bất thường ở giữa để
phân tích hình ảnh của cây bị nhiễm bệnh.
Phương pháp đề xuất có thể nhẹ và được
triển khai cho các bảng nhúng trên UAV.
Những đóng góp của chúng tôi gồm hai
phần và được tóm tắt như sau:
Chúng tôi đề xuất một kiến trúc với quy
trình xử lý bao gồm phân đoạn lá bệnh.
Chúng tôi cũng nâng cao mô hình
EfficientNet để cải thiện cả độ chính xác và
thời gian xử lý của toàn bộ quá trình.
2. CÁC NỘI DUNG LIÊN QUAN
Để cải thiện độ chính xác của mô hình làm
việc với hình ảnh UAV, [1] đề xuất tăng độ
sâu của mạng. Tuy nhiên, nó gây ra tác động
tiêu cực đến hiệu quả tính toán. Lin và cộng
sự [2] cũng kết hợp Faster R-CNN [3], Mask
R-CNN [4] với Inception [5], ResNet [6] 50
và 101 để cải thiện hiệu suất phát hiện sâu
bệnh. Công trình này kết thúc với kết quả
đánh giá khá cao với độ chính xác 83%. Tuy
nhiên, việc kết hợp Mask R-CNN để phân
đoạn và ResNet101 để phân loại sẽ gây ra độ
trễ lớn khi chạy hệ thống trong lĩnh vực thời
gian thực. Để giải quyết vấn đề này, chúng
tôi sử dụng Efficientnet-Lite cho mô hình
phân loại của chúng tôi vì tính gọn nhẹ của
nó. Nhờ ít sức tính toán hơn và ít tham số
hơn để chạy trên các thiết bị có cấu hình
thấp, Efficientnet-Lite kế thừa từ Efficientnet
để duy trì độ chính xác cạnh tranh so với các
mô hình tiên tiến khác trong phân loại.
3. PHƯƠNG PHÁP
3.1. Phân đoạn
Refined UNet Lite gốc đã được đào tạo và
kiểm tra tốt trên 3 phiên bản (v1, v2 và v3)
trên tập dữ liệu hình ảnh Landsat 8 OLI. Do
Tuyển tập Hội nghị Khoa học thường niên năm 2024. ISBN: 978-604-82-8175-5
90
đó, chúng tôi đã đào tạo mạng với tập dữ liệu
của chúng tôi và tinh chỉnh nó để phù hợp
với tùy chỉnh của chúng tôi trong nghiên cứu
này. Mô hình được đánh giá trên tập dữ liệu
tự thu thập của chúng tôi gồm 1000 hình ảnh.
Tập dữ liệu được chú thích thủ công bằng
LabelMe. Dữ liệu hình ảnh bệnh lá được thu
thập bằng UAV (máy bay không người lái)
trong thời tiết nóng.
Chúng tôi kết hợp hai mô hình phân đoạn
với hai nhiệm vụ: (1) Mô hình có nhiệm vụ
phân đoạn lá; và (2) Mô hình chịu trách
nhiệm phân đoạn sâu bệnh.
3.2. Khai thác
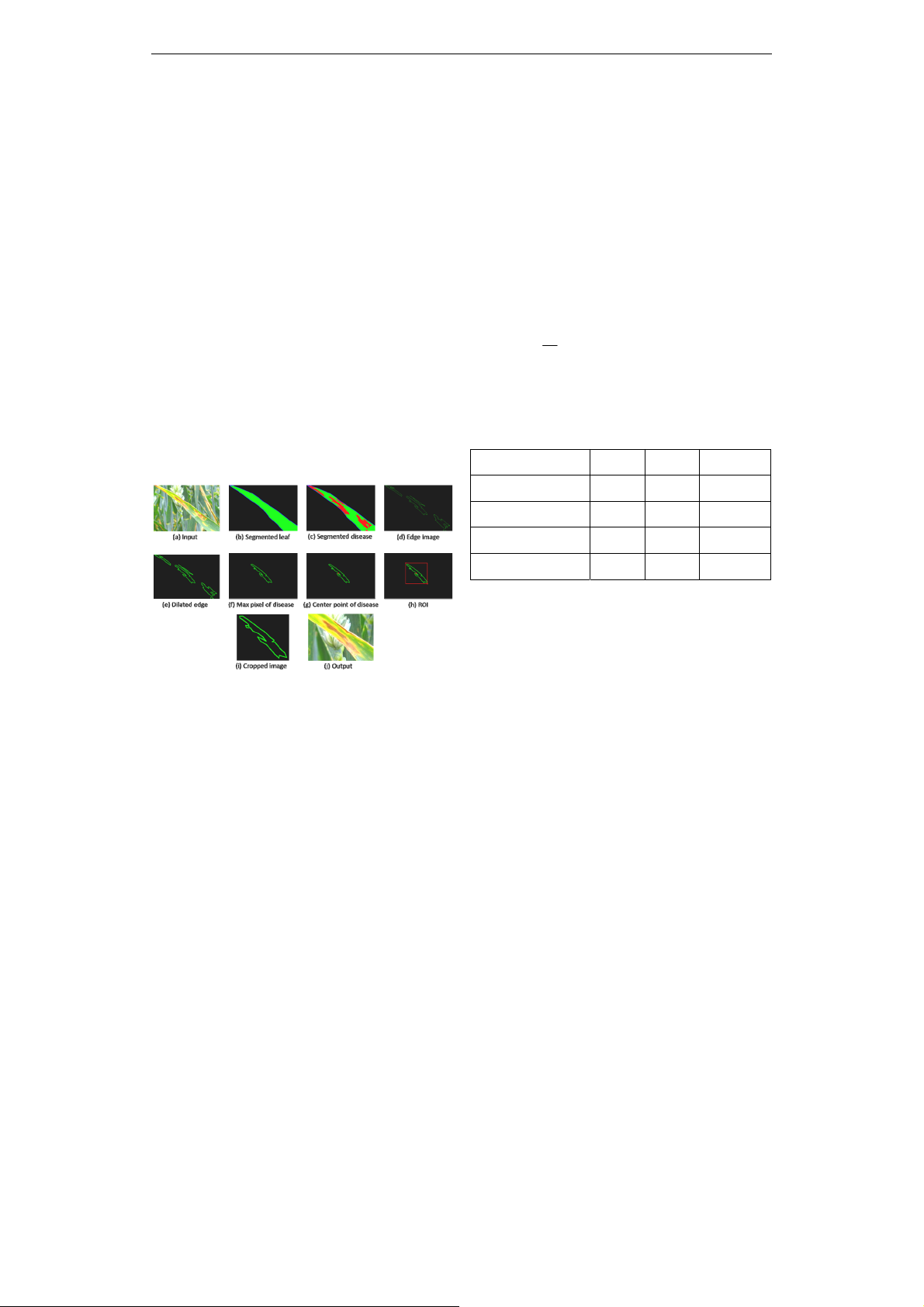
Để phát hiện ROI, hình ảnh bệnh đã được
phân đoạn từ bước đầu tiên trải qua thuật
toán Canny để phát hiện các cạnh của bệnh
đã được phân đoạn. Như chúng ta có thể thấy
từ hình minh họa (Hình 2c), các bệnh được
phát hiện khá mỏng và mờ.
Hình 1. Quy trình trích xuất bệnh lá
Bước tiếp theo là tìm các bệnh có vết điểm
ảnh lớn nhất (Hình 2f) từ các đối tượng bệnh
trên lá cấy ghép (Hình 2e). Quá trình này dựa
trên các điểm pixel trên hình để tính toán
diện tích pixel của các bệnh. Sau khi có được
đối tượng bệnh thuận lợi nhất, chúng tôi tính
toán điểm tiêu cự của đối tượng bệnh (Hình
2g). Để xác định khu vực bệnh, chúng tôi cần
ít nhất 2 điểm trên đường nối tâm với điểm
cạnh của đối tượng bệnh. Cụ thể, các điểm
nên là hai trong số các điểm trên và dưới mà
chúng tôi tìm thấy từ bước trước. Bằng cách
sử dụng tọa độ, chúng tôi có thể dễ dàng
quyết định hình chữ nhật duy nhất để hiển thị
ROI. Điều này có thể được tham khảo trong
Hình 2h. Cuối cùng, hình ảnh gốc được cắt
với cùng vị trí như vùng quan tâm trước khi
nhận đầu vào cuối cùng của bộ phân loại
(Hình 2j).
3.3. Phân loại
Trong bước phân loại này, chúng tôi có hai
danh mục, đó là bình thường và bất thường.
Do đó, chúng tôi chọn hàm mất mát Binary
Cross-Entropy được mô tả bằng công thức
toán học sau:
1
1
ˆˆˆ
( , ) log( ) (1 ) log(1 )
N
ii i i
i
L
yy y y y y
N
I. Kết quả thực nghiệm
Bảng 1. So sánh các phương pháp
phân loại khác nhau
Mô hình IoU Dice Time (ms)
Unet 0.48 0.83 52
Attention UNet 0.66 0.86 68
SD-UNet 0.62 0.94 18
Refined Unet Lite 0.68 0.92 15
Theo kết quả ở Bảng I, mô hình Refined
UNet Lite sau khi được điều chỉnh đã đạt
hiệu suất cao với hệ số dice cao nhất là 68%
tại thời điểm suy luận 15 mili giây. Về mặt
đối đầu hiệu quả, Attention Unet thể hiện sức
mạnh của nó ở mức 66% trong IoU và 86%
trong hệ số dice. Tuy nhiên, độ phức tạp về
cấu trúc dẫn đến thời gian tính toán khổng lồ
của họ là 68 ms. Với giá trị IoU dưới trung
bình chỉ 48%, UNet được xếp hạng là mô
hình phân đoạn bệnh tệ nhất. Cũng có một
nghịch lý trong bài kiểm tra này là SD-UNet
mặt khác vượt trội hơn UNet với 62% trong
IoU và 94% trong hệ số dice, Tuy nhiên, thời
gian tính toán cho phiên bản này tương đối
dài hơn, mất khoảng 18 mili giây để tính
toán. Điều này đáng chú ý vì nó ban đầu
được đề xuất như một biến thể nhẹ của kiến
trúc UNet.
Tuyển tập Hội nghị Khoa học thường niên năm 2024. ISBN: 978-604-82-8175-5
91
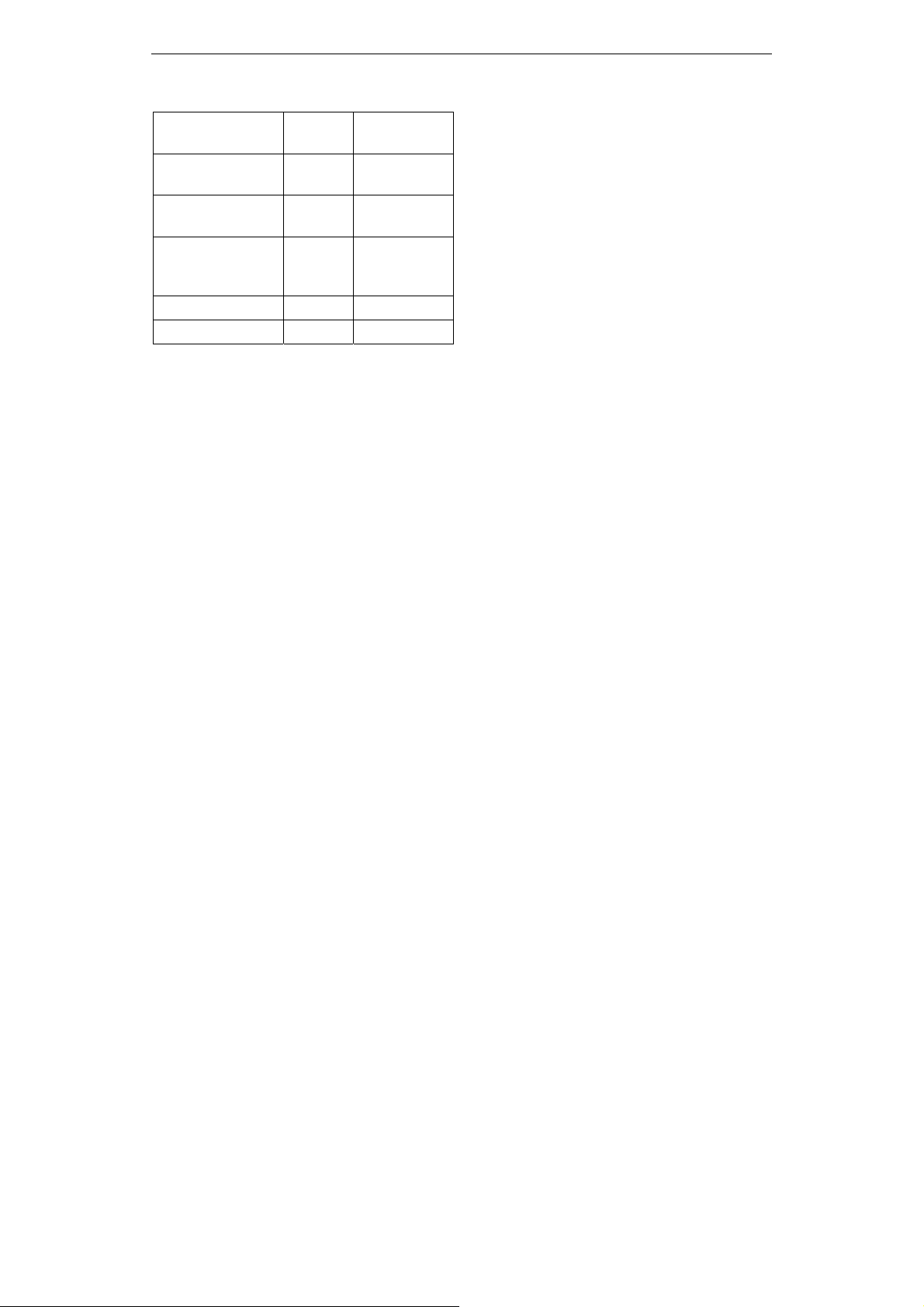
Bảng 2: So sánh các mô hình phân loại
giữa các biến thể của Efficientnet
Mô hình Điểm F1 Thời gian
suy luận (ms)
EfficientNet Lite
B9 V2 0.9332 92,4378
EfficientNet Lite
B9 V3 0.9685 87,5768
EfficientNet Lite
B9 V3+ (đề suất
của chúng tôi)
0.9522 56,4728
EfficientNet B0 0.9478 118,4728
EfficientNet B1 0.9583 143,6546
Trong Bảng II, thông qua kiểm tra nghiêm
ngặt, chúng tôi đã cung cấp bằng chứng để hỗ
trợ việc lựa chọn mô hình của chúng tôi. Cụ
thể, chúng tôi đã so sánh EfficientNet Lite B9
V3 và các phiên bản khác nhau của
EfficientNet từ B0 đến B1. Những so sánh
này giúp chúng tôi xác định rằng lựa chọn
mô hình của chúng tôi là phù hợp và có cơ
sở. EfficientNet được chọn để so sánh vì nó
được đề xuất là phiên bản nâng cao của
EfficientNet Lite B9 V3 bằng cách kết hợp
với ResNet và EfficientNet.
4. KẾT LUẬN
Chúng tôi đã trình bày một kiến trúc
neural đa lớp phức tạp để phát hiện bệnh lá.
Mạng có thể phát hiện lá bệnh bị che qua ba
bước chính: phân đoạn bệnh lá, trích xuất
ứng viên bệnh lá và phân loại ứng viên bệnh
lá. Để đánh giá hiệu quả của kiến trúc đề
xuất, chúng tôi đã thu thập một tập dữ liệu
gồm 1000 hình ảnh được chụp bởi UAV. Các
thử nghiệm với một số mô hình hiện đại bao
gồm MobileNet, ResNet, YOLO, Inception,
EfficientNet và UNet+ rules cho thấy phương
pháp đề xuất của chúng tôi có thể đạt điểm
F1 95%, tốt hơn các phương pháp khác.
Những kết quả này cho thấy triển vọng của
phương pháp đề xuất.
5. TÀI LIỆU THAM KHẢO
[1] A. Alhaj Ali, B. Chramcov, R. Jasek, R.
Katta, S. Krayem, and E. Awwama,
“Tomato Leaf Diseases Detection Using
Deep Learning,” Lect. Notes Networks Syst.,
vol. 231 LNNS, no. Iciccs, pp. 199-208,
2021, doi: 10.1007/978-3-030-90321-3_18.
[2] P. B. Padol and A. A. Yadav, “SVM
classifier based grape leaf disease
detection,” Conf. Adv. Signal Process.
CASP 2016, pp. 175-179, 2016, doi:
10.1109/CASP.2016.7746160.
[3] S. D. Khirade and A. B. Patil, “Plant disease
detection using image processing,” Proc. -
1st Int. Conf. Comput. Commun. Control
Autom. ICCUBEA 2015, pp. 768-771, 2015,
doi: 10.1109/ICCUBEA.2015.153.
[4] G. Irmak and A. Saygili, “Tomato Leaf
Disease Detection and Classification using
Convolutional Neural Networks,” Proc. -
2020 Innov. Intell. Syst. Appl. Conf. ASYU
2020, pp. 2-4, 2020, doi: 10.1109/
ASYU50717.2020.9259832.
[5] H. J. Yu, C. H. Son, and D. H. Lee, “Apple
leaf disease identification through region-
of-interest-aware deep convolutional neural
network,” J. Imaging Sci. Technol., vol. 64,
no. 2, pp. 1-13, 2020, doi: 10.2352/J.
ImagingSci.Technol.2020.64.2.020507.
[6] H. Li, Y. Shi, B. Zhang, and Y. Wang,
“Superpixel-based feature for aerial image
scene recognition,” Sensors (Switzerland),
vol. 18, no. 1, 2018, doi: 10.3390/s18010156.









![Dự đoán tuyển sinh: Mô hình học máy cho Cao đẳng [chuẩn xác nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250709/lakim0906/135x160/431_de-an-thac-si-mo-hinh-hoc-may-du-doan-kha-nang-tuyen-sinh-tai-truong-cao-dang-ky-thuat-va-nghiep-vu.jpg)