
5
/
28
/
2011
5
/
28
/
2011
1
1
TÌTÌ
M HIM HI
ỂỂ
U VU V
Ề ĐỘỀ ĐỘ
NG CƠ NG CƠ
TÌTÌ
M HIM HI
ỂỂ
U VU V
Ề ĐỘỀ ĐỘ
NG CƠ NG CƠ
TÌTÌ
M HIM HI
ỂỂ
U VU V
Ề ĐỘỀ ĐỘ
NG CƠ NG CƠ
TÌTÌ
M HIM HI
ỂỂ
U VU V
Ề ĐỘỀ ĐỘ
NG CƠ NG CƠ
BB
ƯỚƯỚ
C C
BB
ƯỚƯỚ
C C
BB
ƯỚƯỚ
C C
BB
ƯỚƯỚ
C C
(STEP MOTOR)(STEP MOTOR)
(STEP MOTOR)(STEP MOTOR)
(STEP MOTOR)(STEP MOTOR)
(STEP MOTOR)(STEP MOTOR)
GIGI
ỚỚ
I THII THI
ỆỆ
UU
GIGI
ỚỚ
I THII THI
ỆỆ
UU
GIGI
ỚỚ
I THII THI
ỆỆ
UU
Động cơ bước là một loại động cơ điện có
Động cơ bước là một loại động cơ điện có
Động cơ bước là một loại động cơ điện có
nguyên lý và ứng dụng khác biệt với đa số
nguyên lý và ứng dụng khác biệt với đa số
nguyên lý và ứng dụng khác biệt với đa số
các động cơ điện thông thường. Chúng thực
các động cơ điện thông thường. Chúng thực
các động cơ điện thông thường. Chúng thực
chất là một động cơ đồng bộ dùng để biến
chất là một động cơ đồng bộ dùng để biến
chất là một động cơ đồng bộ dùng để biến
đổi các tín hiệu điều khiển dưới dạng các
đổi các tín hiệu điều khiển dưới dạng các
đổi các tín hiệu điều khiển dưới dạng các
xung điện rời rạc kế tiếp nhau thành các
xung điện rời rạc kế tiếp nhau thành các
xung điện rời rạc kế tiếp nhau thành các
chuyển động góc quay hoặc các chuyển
chuyển động góc quay hoặc các chuyển
chuyển động góc quay hoặc các chuyển
động của rôto có khả năng cố định rôto vào
động của rôto có khả năng cố định rôto vào
động của rôto có khả năng cố định rôto vào
các vị trí cần thiết.
các vị trí cần thiết.
các vị trí cần thiết.
5
/
28
/
2011
5
/
28
/
2011
2
2
S
tep
m
otor có
5
đặc tính cơ bản sau:
S
tep
m
otor có
5
đặc tính cơ bản sau:
S
tep
m
otor có
5
đặc tính cơ bản sau:
Brushlesss
( không chổi than )
Brushlesss
( không chổi than )
Brushlesss
( không chổi than )
Load Independent
( độc lập với tải ):quay với
Load Independent
( độc lập với tải ):quay với
Load Independent
( độc lập với tải ):quay với
tốc độ ổn định trong tầm moment của động cơ.
tốc độ ổn định trong tầm moment của động cơ.
tốc độ ổn định trong tầm moment của động cơ.
Open loop positioning
(đk vị trí vòng hở): thông
Open loop positioning
(đk vị trí vòng hở): thông
Open loop positioning
(đk vị trí vòng hở): thông
thường ta có thể đếm xung kích ở động cơ để
thường ta có thể đếm xung kích ở động cơ để
thường ta có thể đếm xung kích ở động cơ để
xác định vị trí nhưng trong những ứng dụng đòi
xác định vị trí nhưng trong những ứng dụng đòi
xác định vị trí nhưng trong những ứng dụng đòi
hỏi tính chính xác cao STEP thường được sử
hỏi tính chính xác cao STEP thường được sử
hỏi tính chính xác cao STEP thường được sử
dụng kết hợp với các cảm biến vị trí như :
dụng kết hợp với các cảm biến vị trí như :
encoder, biến trở...
encoder, biến trở...
Holding Torque
:
có
moment gi
ữ
l
ớ
n
Holding Torque
:
có
moment gi
ữ
l
ớ
n
Holding Torque
:
có
moment gi
ữ
l
ớ
n
Excellent Response
( Đáp ứng tốt):Đáp ứng tốt
Excellent Response
( Đáp ứng tốt):Đáp ứng tốt
Excellent Response
( Đáp ứng tốt):Đáp ứng tốt
khi khởi động, dừng lại và đảo chiều quay một
khi khởi động, dừng lại và đảo chiều quay một
khi khởi động, dừng lại và đảo chiều quay một
cách dễ dàng.
cách dễ dàng.
Phân
loạ
i:
Phân
loạ
i:
Phân
loạ
i:
Có
3
loạ
i step motor cơ
bả
n:
Có
3
loạ
i step motor cơ
bả
n:
Có
3
loạ
i step motor cơ
bả
n:
Động cơ nam châm vĩnh cửu
:
Roto đ
ượ
c
Động cơ nam châm vĩnh cửu
:
Roto đ
ượ
c
Động cơ nam châm vĩnh cửu
:
Roto đ
ượ
c
t
ừ hó
a.
t
ừ hó
a.
t
ừ hó
a.
Độ
ng cơ từ t
r
ở
thay đổi
:
Rotor đ
ượ
c
xẻ
Độ
ng cơ từ t
r
ở
thay đổi
:
Rotor đ
ượ
c
xẻ
Độ
ng cơ từ t
r
ở
thay đổi
:
Rotor đ
ượ
c
xẻ
rã
nh
nhỏ
rã
nh
nhỏ
Động cơ lai
:
K
ế
t h
ợ
p
2
kỹ
thu
ậ
t trên.
Động cơ lai
:
K
ế
t h
ợ
p
2
kỹ
thu
ậ
t trên.
Động cơ lai
:
K
ế
t h
ợ
p
2
kỹ
thu
ậ
t trên.
5
/
28
/
2011
5
/
28
/
2011
3
3
Độ
ng cơ nam châm
vĩ
nh c
ử
u:
I.
Độ
ng cơ nam châm
vĩ
nh c
ử
u:
I.
Độ
ng cơ nam châm
vĩ
nh c
ử
u:
Loạ
i
nà
y
cò
n đ
ượ
c chia ra
là
m
2
loạ
i
nhỏ là
:
Loạ
i
nà
y
cò
n đ
ượ
c chia ra
là
m
2
loạ
i
nhỏ là
:
Loạ
i
nà
y
cò
n đ
ượ
c chia ra
là
m
2
loạ
i
nhỏ là
:
Độ
ng cơ
b
ướ
c đơn c
ự
c
và
l
ưỡ
ng c
ự
c
Độ
ng cơ
b
ướ
c đơn c
ự
c
và
l
ưỡ
ng c
ự
c
Độ
ng cơ
b
ướ
c đơn c
ự
c
và
l
ưỡ
ng c
ự
c
1.
Độ
ng cơ đơn c
ự
c:
1.
Độ
ng cơ đơn c
ự
c:
1.
Độ
ng cơ đơn c
ự
c:
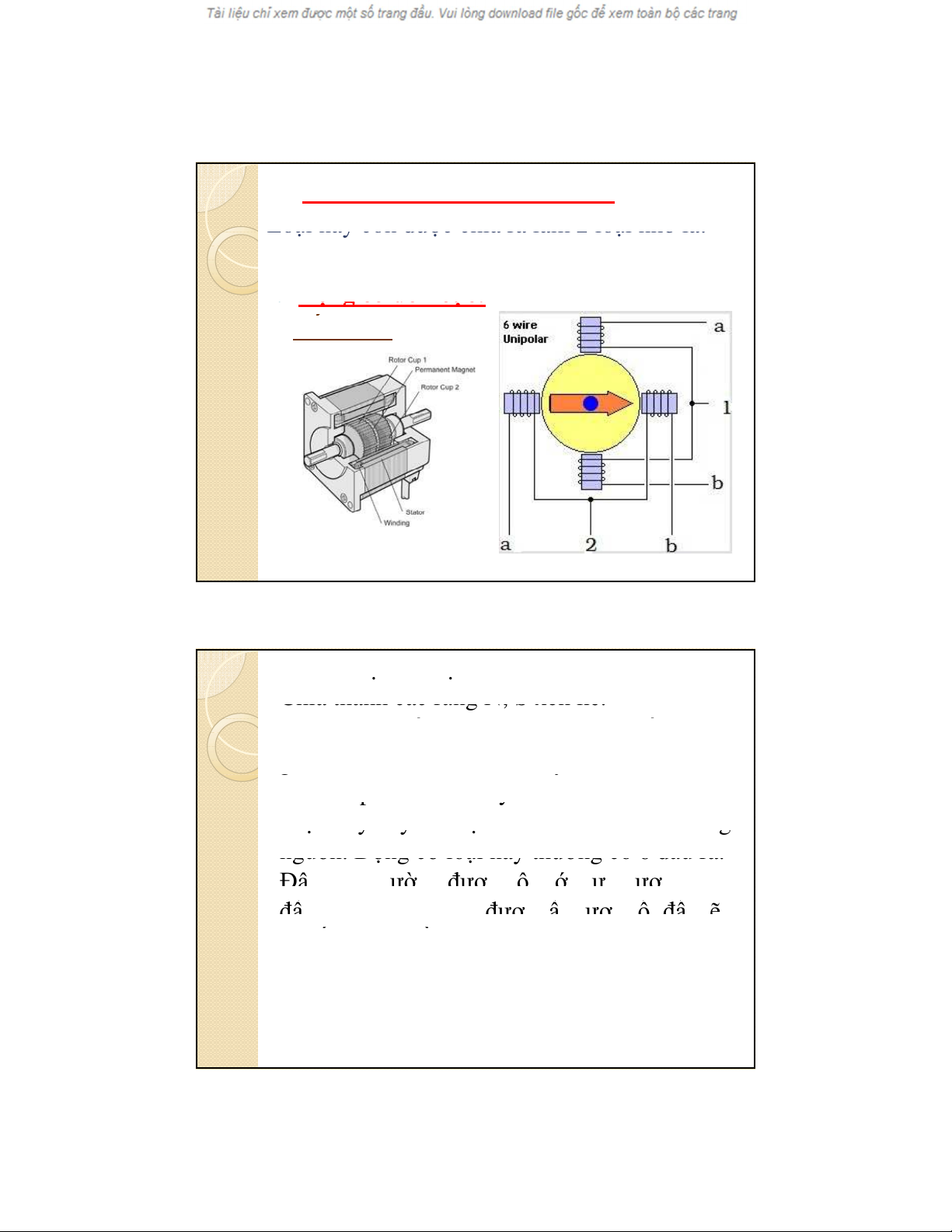
a)
C
ấ
u
Tạ
o:
a)
C
ấ
u
Tạ
o:
a)
C
ấ
u
Tạ
o:
Roto:
được cấu tạo từ nam châm vĩnh cửu.
Roto:
được cấu tạo từ nam châm vĩnh cửu.
Roto:
được cấu tạo từ nam châm vĩnh cửu.
Chia thành các răng N, S xen kẽ.
Chia thành các răng N, S xen kẽ.
Chia thành các răng N, S xen kẽ.
Stato:
được cấu tạo bởi
2
cuộn dây bố trí trực
Stato:
được cấu tạo bởi
2
cuộn dây bố trí trực
Stato:
được cấu tạo bởi
2
cuộn dây bố trí trực
giao với nhau. Mỗi cuộn dây lại được chia
giao với nhau. Mỗi cuộn dây lại được chia
giao với nhau. Mỗi cuộn dây lại được chia
thành
2
phần bố trí xuyên tâm đối. Giữa các
thành
2
phần bố trí xuyên tâm đối. Giữa các
thành
2
phần bố trí xuyên tâm đối. Giữa các
cuộn dây này có một đầu ra để nối với dương
cuộn dây này có một đầu ra để nối với dương
cuộn dây này có một đầu ra để nối với dương
nguồn. Động cơ loại này thường có
6
đầu ra.
nguồn. Động cơ loại này thường có
6
đầu ra.
nguồn. Động cơ loại này thường có
6
đầu ra.
Đầu
1
,
2
thường được nối với cực dương. Các
Đầu
1
,
2
thường được nối với cực dương. Các
Đầu
1
,
2
thường được nối với cực dương. Các
đầu
1
a,
1
b,
2
a và
2
b được lần lượt nối đất sẽ
đầu
1
a,
1
b,
2
a và
2
b được lần lượt nối đất sẽ
đầu
1
a,
1
b,
2
a và
2
b được lần lượt nối đất sẽ
quyết định chiều quay của động cơ.
quyết định chiều quay của động cơ.
quyết định chiều quay của động cơ.
5
/
28
/
2011
5
/
28
/
2011
4
4
b)
Hoạ
t đ
ộ
ng:
b)
Hoạ
t đ
ộ
ng:
b)
Hoạ
t đ
ộ
ng:
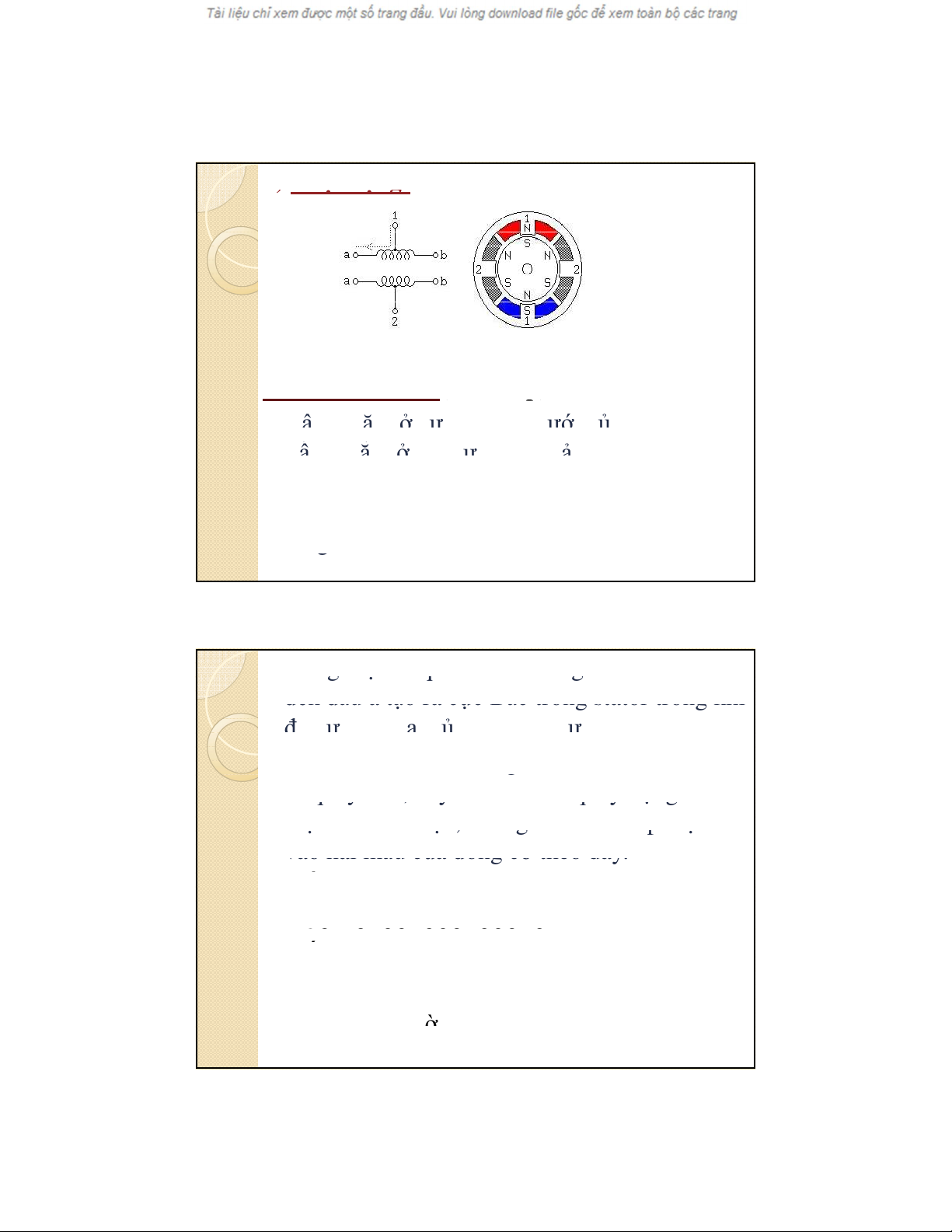
Phương
phá
p
1
:
(Full step)
Phương
phá
p
1
:
(Full step)
Phương
phá
p
1
:
(Full step)
Mấu
1
nằm ở cực trên và dưới của stator, còn
Mấu
1
nằm ở cực trên và dưới của stator, còn
Mấu
1
nằm ở cực trên và dưới của stator, còn
mấu
2
nằm ở hai cực bên phải và bên trái
mấu
2
nằm ở hai cực bên phải và bên trái
mấu
2
nằm ở hai cực bên phải và bên trái
động cơ. Rotor là một nam châm vĩnh cửu
động cơ. Rotor là một nam châm vĩnh cửu
động cơ. Rotor là một nam châm vĩnh cửu
với
6
cực,
3
Nam và
3
Bắc, xếp xen kẽ trên
với
6
cực,
3
Nam và
3
Bắc, xếp xen kẽ trên
vòng tròn.
vòng tròn.
vòng tròn.
Dòng điện đi qua từ đầu trung tâm của mấu
1
Dòng điện đi qua từ đầu trung tâm của mấu
1
Dòng điện đi qua từ đầu trung tâm của mấu
1
đến đầu a tạo ra cực Bắc trong stator trong khi
đến đầu a tạo ra cực Bắc trong stator trong khi
đến đầu a tạo ra cực Bắc trong stator trong khi
đó cực còn lại của stator là cực Nam.
đó cực còn lại của stator là cực Nam.
đó cực còn lại của stator là cực Nam.
Nếu điện ở mấu
1
bị ngắt và kích mấu
2
, rotor
Nếu điện ở mấu
1
bị ngắt và kích mấu
2
, rotor
Nếu điện ở mấu
1
bị ngắt và kích mấu
2
, rotor
sẽ quay
30
0
, hay
1
bước. Để quay động cơ
sẽ quay
30
0
, hay
1
bước. Để quay động cơ
sẽ quay
30
, hay
1
bước. Để quay động cơ
một cách liên tục, chúng ta chỉ cần áp điện
một cách liên tục, chúng ta chỉ cần áp điện
một cách liên tục, chúng ta chỉ cần áp điện
vào hai mấu của đông cơ theo dãy
.
vào hai mấu của đông cơ theo dãy
.
vào hai mấu của đông cơ theo dãy
.
M
ấ
u
1
a:
100010001000
M
ấ
u
1
a:
100010001000
M
ấ
u
1
a:
100010001000
M
ấ
u
1
b:
001000100010
M
ấ
u
1
b:
001000100010
M
ấ
u
1
b:
001000100010
M
ấ
u
2
a:
010001000100
M
ấ
u
2
a:
010001000100
M
ấ
u
2
a:
010001000100
M
ấ
u
2
b:
000100010001
M
ấ
u
2
b:
000100010001
M
ấ
u
2
b:
000100010001
Th
ờ
i gian
Th
ờ
i gian
Th
ờ
i gian
5
/
28
/
2011
5
/
28
/
2011
5
5
Tạ
i m
ỗ
i th
ờ
i đi
ể
m
chỉ có
1
n
ử
a cu
ộ
n dây
có
Tạ
i m
ỗ
i th
ờ
i đi
ể
m
chỉ có
1
n
ử
a cu
ộ
n dây
có
Tạ
i m
ỗ
i th
ờ
i đi
ể
m
chỉ có
1
n
ử
a cu
ộ
n dây
có
đi
ệ
n
1
a ho
ặ
c
1
b ho
ặ
c
2
a ho
ặ
c
2
b
vì
v
ậ
y
để
đi
ệ
n
1
a ho
ặ
c
1
b ho
ặ
c
2
a ho
ặ
c
2
b
vì
v
ậ
y
để
đi
ệ
n
1
a ho
ặ
c
1
b ho
ặ
c
2
a ho
ặ
c
2
b
vì
v
ậ
y
để
th
ự
c hi
ệ
n h
ế
t
1
vò
ng quay đ
ộ
ng cơ
phả
i di
th
ự
c hi
ệ
n h
ế
t
1
vò
ng quay đ
ộ
ng cơ
phả
i di
th
ự
c hi
ệ
n h
ế
t
1
vò
ng quay đ
ộ
ng cơ
phả
i di
chuy
ể
n
1
b
ướ
c
.
Nên
gọ
i
là
đi
ề
u khi
ể
n
1
b
ướ
c.
chuy
ể
n
1
b
ướ
c
.
Nên
gọ
i
là
đi
ề
u khi
ể
n
1
b
ướ
c.
chuy
ể
n
1
b
ướ
c
.
Nên
gọ
i
là
đi
ề
u khi
ể
n
1
b
ướ
c.
Phương
phá
p
2
(Full step)
Phương
phá
p
2
(Full step)
Phương
phá
p
2
(Full step)
Tạ
i m
ỗ
i th
ờ
i đi
ể
m
2
n
ử
a cu
ộ
n dây đ
ượ
c c
ấ
p
Tạ
i m
ỗ
i th
ờ
i đi
ể
m
2
n
ử
a cu
ộ
n dây đ
ượ
c c
ấ
p
Tạ
i m
ỗ
i th
ờ
i đi
ể
m
2
n
ử
a cu
ộ
n dây đ
ượ
c c
ấ
p
đi
ệ
n
để là
m tăng momen
củ
a đ
ộ
ng cơ.
đi
ệ
n
để là
m tăng momen
củ
a đ
ộ
ng cơ.
đi
ệ
n
để là
m tăng momen
củ
a đ
ộ
ng cơ.
M
ấ
u
1
a:
110011001100
M
ấ
u
1
a:
110011001100
M
ấ
u
1
a:
110011001100
M
ấ
u
1
b:
001100110011
M
ấ
u
1
b:
001100110011
M
ấ
u
1
b:
001100110011
M
ấ
u
2
a:
011001100110
M
ấ
u
2
a:
011001100110
M
ấ
u
2
a:
011001100110
M
ấ
u
2
b:
100110011001
M
ấ
u
2
b:
100110011001
M
ấ
u
2
b:
100110011001
Th
ờ
i gian
Th
ờ
i gian
Th
ờ
i gian
Phương
phá
p
3
:
(Half step)
Phương
phá
p
3
:
(Half step)
Phương
phá
p
3
:
(Half step)
K
ế
t h
ợ
p
cả
2
pp trên khi đ
ó
đ
ộ
ng cơ di chuy
ể
n
K
ế
t h
ợ
p
cả
2
pp trên khi đ
ó
đ
ộ
ng cơ di chuy
ể
n
K
ế
t h
ợ
p
cả
2
pp trên khi đ
ó
đ
ộ
ng cơ di chuy
ể
n
m
ỗ
i b
ướ
c
15
0
m
ỗ
i b
ướ
c
15
0
m
ỗ
i b
ướ
c
15
0
M
ấ
u
1
a:
11000001110000011100000111
M
ấ
u
1
a:
11000001110000011100000111
M
ấ
u
1
a:
11000001110000011100000111
M
ấ
u
1
b:
00011100000111000001110000
M
ấ
u
1
b:
00011100000111000001110000
M
ấ
u
1
b:
00011100000111000001110000
M
ấ
u
2
a:
01110000011100000111000001
M
ấ
u
2
a:
01110000011100000111000001
M
ấ
u
2
a:
01110000011100000111000001
M
ấ
u
2
b:
00000111000001110000011100
M
ấ
u
2
b:
00000111000001110000011100
M
ấ
u
2
b:
00000111000001110000011100
Th
ờ
i gian
Th
ờ
i gian
Th
ờ
i gian
Đ
ể
tăng đ
ộ
phân
giả
i
củ
a step motor
thì
ta tăng
Đ
ể
tăng đ
ộ
phân
giả
i
củ
a step motor
thì
ta tăng
Đ
ể
tăng đ
ộ
phân
giả
i
củ
a step motor
thì
ta tăng
s
ố
c
ự
c.
s
ố
c
ự
c.
s
ố
c
ự
c.


![Các hệ thống điều khiển: Điều khiển quá trình gia công [chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131108/online_12/135x160/3991383877530.jpg)

![Bài Viết Tuyến tính tích hợp [chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130701/lilinz/135x160/5061372680353.jpg)
![Tuyến tính tích hợp: [Thêm từ khóa phụ/mô tả để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130623/sea123123/135x160/1504779_349.jpg)




















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)