WALKING ROBOT S¸U CH¢N
KS. Bïi Quang §−îc, PGS. TS. §Æng V¨n Ngh×n
Bé m«n C¬ §iÖn Tö - Khoa C¬ KhÝ
§¹i häc B¸ch Khoa Tp.Hå ChÝ Minh
Email: bqduoc@dme.hcmut.edu.vn
Tãm t¾t
Chóng t«i giíi thiÖu mét lo¹i robot ®i b»ng s¸u ch©n mét c¸ch linh ho¹t. Robot ®−îc ®iÒu khiÓn b»ng bé vi xö lý
vµ sö dông 12 ®éng c¬ DC ®Ó truyÒn ®éng. C¸c ch©n robot ®−îc ®iÒu khiÓn vµ ho¹t ®éng ®éc lËp, chóng phèi
hîp víi nhau t¹o ra sù di chuyÓn cho robot. Kh¶ n¨ng øng dông cña robot rÊt lín trong l·nh vùc gi¶i trÝ, d©n
dông vµ th¸m hiÓm.
Abstract
We introduce a new type of robot -the Hexapod walking robot (six-legged robot), powered by 12 DC servos and
controled by AT89C51 mircocontroller board. The legs were controlled independently, and the combine of this
to make the robot moving. This Robot is applied in many fileds such as entertaiment, civil and discovery.
1/ TOµN C¶NH VÒ WALKING ROBOT
Ngay tõ khi ra ®êi robot ®−îc ¸p dông réng r·i ®Ó thay thÕ søc lùc cña con ng−êi trong
viÖc bèc xÕp vµ vËn chuyÓn vËt liÖu ... trong c¸c d©y chuyÒn s¶n xuÊt tù ®éng. Nh−ng cã mét
lo¹i robot l¹i cã kh¶ n¨ng phôc vô ®¾c lùc ë nh÷ng m«i tr−êng nguy hiÓm, ®éc h¹i, ë trªn cao,
d−íi ®¹i d−¬ng vµ trªn c¸c hµnh tinh mµ con ng−êi kh«ng thÓ tíi ®−îc ®ã lµ robot di ®éng.
Theo nguyªn t¾c dÞch chuyÓn, robot di ®éng cã thÓ ph©n ra c¸c lo¹i sau:
- Robot di chuyÓn b»ng b¸nh xe, b¸nh xÝch (Mobile Robot).
- Robot di chuyÓn b»ng ch©n (Walking Robot).
- Robot di chuyÓn b»ng c¸ch tr−ên m×nh (Snake Robot).
1.1/ Giíi thiÖu vÒ Walking robot
Walking Robot lµ d¹ng ®Æc biÖt cña Robot di ®éng. Sù di chuyÓn cña nã ®−îc thùc
hiÖn bëi sù phèi hîp chuyÓn ®éng cña c¸c ch©n. Sù di chuyÓn nµy cã thÓ b¾t ch−íc tõ thÕ giíi
®éng vËt, nh− lµ: loµi ng−êi, c¸c loµi ®éng vËt, c¸c loµi c«n trïng, ...
Robot lµ s¶n phÈm cña c¬ ®iÖn tö, gåm cã c¸c thµnh phÇn sau :
a) PhÇn cøng: gåm tÊt c¶ c¸c bé phËn cÊu thµnh th©n Robot, nh− lµ: c¸c kÕt cÊu ch©n,
kÕt cÊu khung, truyÒn ®éng, ... vµ tÊt c¶ c¸c linh kiÖn ®iÖn tö cÊu thµnh m¹ch ®iÖn ®−îc g¾n
trªn th©n Robot, nh− lµ: c¸c vi m¹ch (IC), transistor, diode, ®iÖn trë, tô ®iÖn, c¸c ®−êng d©y
dÉn, c¸c lo¹i c¶m biÕn, ...
b) PhÇn mÒm: gåm tÊt c¶ c¸c ch−¬ng tr×nh ®iÒu khiÓn tõ bªn ngoµi ®−îc g¾n trªn th©n
Robot, nh− lµ: c¸c ch−¬ng tr×nh ®iÒu khiÓn tõ m¸y tÝnh, hoÆc tõ c¸c bé vi xö lý, ...
PhÇn c¬ khÝ ®−îc xem nh− lµ th©n cña Robot, cßn phÇn m¹ch ®iÖn vµ phÇn mÒm ®−îc
xem nh− bé n·o cña Robot.
1.2/ LÞch sö ph¸t triÓn Walking robot:
*Thêi kú ®Çu:
+ B¶n thiÕt kÕ ®Çu tiªn cña mét chiÕc m¸y cã ch©n xuÊt hiÖn vµo thÕ kû 18.
+ N¨m 1893 Georges Moore thiÕt kÕ ra chiÕc m¸y hai ch©n biÕt ®i ®Çu tiªn gäi lµ
“Ng−êi h¬i n−íc” (Steam Man).
+ B¶n thiÕt kÕ cña chiÕc m¸y 4 ch©n biÕt ®i ®Çu tiªn do LA Rygg thùc hiÖn mang
tªn “Chó ngùa c¬ khÝ” (Mechanical Horse).
+ Trong suèt thÕ chiÕn thø nhÊt, chiÕc m¸y nhiÒu ch©n biÕt ®i ®−îc ph¸t triÓn dùa
trªn sù c¶i biÕn nh÷ng b¸nh xe cã d©y xÝch.
*Thêi kú nh÷ng chiÕc m¸y biÕt ®i hiÖn ®¹i :
+ N¨m 1964: c¬ cÊu Chebyshev víi m« h×nh ®éng häc cña ®«i ch©n do gi¸o s− tiÕn
sÜ AL.Kemurdjian ë St Peterburg, do Nga thùc hiÖn.
+ N¨m 1966: b¶n thiÕt kÕ Phoney Poney ®−îc thùc hiÖn víi viÖc øng dông m¸y vi
tÝnh vµo ®iÒu khiÓn m¸y biÕt ®i lÇn ®Çu tiªn do McGhee Frank t¹i tr−êng ®¹i häc
Nam Carolina.
+ N¨m 1969: m« h×nh Robot sö dông khÝ nÐn WAP-1 do Ichiro Kato lµm t¹i tr−êng
§¹i häc Waseda, Tokyo, NhËt.
+ Tõ n¨m 1970 ®Õn 1971: Ichiro Kato tiÕp tôc lµm WAP-2, WAP-3 lµ nh÷ng thÕ hÖ
®−îc c¶i tiÕn tõ WAP-1.
+ N¨m 1973: Ichiro Kato ®· t¹o ra Robot gièng con ng−êi, ®ã lµ Wabot-1, lo¹i
Robot gièng ng−êi nµy víi ®Çy ®ñ kÝch cë ®Çu tiªn trªn thÕ giíi.
+ N¨m 1980: Ichiro Kato t¹o ra WL-9DR thÕ hÖ m¸y lÇn ®Çu tiªn trªn thÕ giíi ®−îc
biÕt ®Õn víi kh¶ n¨ng ®i bé hoµn toµn b»ng ®éng lùc häc.
+ N¨m 1985: Ichiro Kato t¹o ra WL – 10RD thÕ hÖ m¸y biÕt ®i cã kh¶ n¨ng lªn
xuèng bËc thang hay dèc nghiªng.
+ N¨m 1984 ®Õn 1988: t¹i tr−êng ®¹i häc Gifu, NhËt. J.Furusho vµ A.S¸ng t¹o ra
BLR-G2.
Cho ®Õn nay, nhiÒu thÕ hÖ Walking Robot ®−îc nghiªn cøu vµ ph¸t triÓn ngµy cµng
hoµn thiÖn h¬n. §Æc biÖt trong cuèi thËp kû nµy qua Robot ®· cã nh÷ng c¶i tiÕn v−ît bËc dÇn
dÇn gièng con ng−êi h¬n vµ ®Ønh cao lµ robot hai ch©n Honda Asimo cña NhËt B¶n.
B¶ng thèng kª Walking Robot theo sè ch©n :
Sè thø tù Lo¹i walking robot Sè l−îng
1 Monopod walking robot (robot 1 ch©n) 2
2 Bipod walking robot (robot 2 ch©n) 33
3 Tripod walking robot (robot 3 ch©n) 1
4 Quarpod walking robot (robot 4 ch©n) 22
5 Hexapod walking robot (robot 6 ch©n) 35
6 Heptapod Walking robot (robot 7 ch©n) 1
7 Octapod Walking robot (robot 8 ch©n) 12
−u ®iÓm næi bËt nhÊt cña Walking robot cã thÓ b−íc qua c¸c ch−íng ng¹i vËt trªn
®−êng ®i, cã thÓ chuyÓn ®éng trªn c¸c ®Þa h×nh phøc t¹p nh−: trÌo lªn xuèng cÇu thang, cã thÓ
di chuyÓn trªn c¸c bÒ mÆt bÊt kú cho dï ®ã lµ bÒ mÆt tr¬n nh½n hay gå ghÒ, ®øng hay nghiªng.
Walking robot Ýt bÞ ch×m xuèng ë nh÷ng n¬i lón, ®Çm lÇy. Walking robot tù ®iÒu chØnh æn
®Þnh (hay lµ ®iÒu chØnh d¸ng ®i cña nã) theo c¸c ®iÒu kiÖn ®Þa h×nh mµ c¸c lo¹i robot di ®éng
kh¸c (Robot di ®éng b»ng b¸nh xe hoÆc b¸nh xÝch,...) khã v−ît qua hoÆc kh«ng thÓ v−ît qua
®−îc. Tuy nhiªn, Walking robot th× khã ®iÒu khiÓn h¬n c¸c lo¹i robot di ®éng kh¸c, bëi v× sù
di chuyÓn cña Walking Robot ®−îc thùc hiÖn bëi sù phèi hîp chuyÓn ®éng cña c¸c ch©n, mµ
mçi ch©n l¹i cã sù chuyÓn ®éng phèi hîp cña c¸c motor t¹i c¸c khíp cña ch©n. VÝ dô, ®èi víi
robot s¸u ch©n (Hexapod Walking robot), nÕu mçi ch©n cã 3 bËc do (mçi ch©n cã thÓ sö dông
3 motor), th× cã thÓ cã ®Õn 18 motor. Vµ nÕu robot s¸u ch©n thùc hiÖn d¸ng ®i Tripod Gait
(d¸ng ®i cã 3 ch©n trô, 3 ch©n b−íc tíi vµ thay ®æi lu©n phiªn) th× ph¶i cã sù phèi hîp chuyÓn
®éng cña c¸c ch©n trong hai nhãm ch©n nµy.
Nh÷ng −u ®iÓm trªn ®©y cho thÊy robot cã ch©n lµ mét lÜnh vùc nhiÒu tiÒm n¨ng, nhiÒu
øng dông trong thùc tiÔn. Ch¼ng h¹n nh− th¸m hiÓm nh÷ng n¬i con ng−êi kh«ng thÓ ®Õn: c¸c
hang ®éng, c¸c khu vùc nhiÔm phãng x¹. Trong c«ng t¸c kiÓm tra nh−: KiÓm tra c¸c bån chøa
trong c«ng nghiÖp. Trong ®êi sèng robot cã ch©n ®−îc øng dông ®Ó tiÕp cËn c¸c con thó d÷ ®Ó
b¾n thuèc g©y mª. Trong nghiªn cøu robot cã ch©n cã thÓ cho ®æ bé trªn c¸c vïng nói ®¸ trªn
c¸c hµnh tinh xa x«i ... Cho ®Õn nay, nhiÒu thÕ hÖ Walking Robot ®−îc nghiªn cøu vµ ph¸t
triÓn ngµy cµng hoµn thiÖn h¬n. §Æc biÖt trong thËp kû võa qua Robot ®· cã nh÷ng c¶i tiÕn
v−ît bËc vµ dÇn dÇn gièng con ng−êi h¬n. V× vËy chóng t«i ®· vµ ®ang nhËn thÊy r»ng viÖc
nghiªn cøu vµ chÕ t¹o walking robot ë ViÖt Nam lµ mét viÖc rÊt cÇn thiÕt vµ lµ mét l·nh vùc
kh«ng thÓ thiÕu trong nghiªn cøu khoa häc ®Ó cã thÓ ¸p dông réng r·i thµnh tùu khoa häc vµo
c)
b)
a)
®êi sèng con ng−êi. Tõ b¶ng thèng kª vÒ Walking robot vµ t×nh h×nh thùc tÕ cña ViÖt Nam
hiÖn nay chóng t«i ®· chän lùa vµ b¾t tay vµo nghiªn cøu vµ chÕ t¹o lo¹i walking robot s¸u
ch©n.
2/ CÊU TRóC MéT WALKING ROBOT S¸U CH¢N
§Ó ®iÒu khiÓn tù ®éng hoµn toµn robot cã ch©n ph¶i cã hiÖu suÊt n¨ng l−îng cao v× robot ph¶i
mang c¸c ®éng c¬ trªn th©n ®ång thêi mang c¶ bé ®iÒu khiÓn trªn nã.
Cã mét sè lo¹i vËt liÖu kh¸c nhau mµ cã thÓ sö dông ®Ó lµm m« h×nh robot, trong ®ã yÕu tè gi¸
c¶ lµ mét nh©n tè quan träng cho viÖc lùa chän vËt liÖu, nh−ng yÕu tè khèi l−îng lµ quan träng
nhÊt ¶nh h−ëng toµn bé qu¸ tr×nh thiÕt kÕ vµ chÕ t¹o robot. PhÇn lín c¸c vËt liÖu ®−îc sö dông
®Ó lµm cÊu tróc khung s−ên robot lµ nh«m, v× nã cã träng l−îng nhÑ vµ cã thÓ gia c«ng c¬ khÝ
dÔ dµng. Nh÷ng chç kh«ng cÇn thiÕt chóng ta cã thÓ xoi r·nh ®Ó gi¶m bít träng l−îng robot.
Qu¸ tr×nh thiÕt kÕ ph¶i chó träng ®Õn bµi to¸n vÒ tÝnh æn ®Þnh tÜnh vµ ®éng cña robot.
2.1/ ThiÕt kÕ ch©n
Sù chÕ t¹o thµnh c«ng Robot phô thuéc vµo ph¹m vi lùa chän thiÕt kÕ ch©n. Tõ ®ã, tÊt c¶ c¸c
d¹ng chuyÓn ®éng b»ng ch©n ®−îc xem xÐt, sau ®ã xÐt ®Õn tÝnh kh¶ thi cña nã. §iÒu nµy th×
rÊt quan träng cho viÖc chän lùa mét c¬ cÊu ch©n mµ nã sÏ tÝnh ®Õn ph¹m vi chuyÓn ®éng lµ
lín nhÊt vµ mµ kh«ng ph¶i chÞu nh÷ng rµng buéc vµo d¸ng ®i ®· ®−îc lùa chän. Do ®ã, giai
®o¹n ®Çu tiªn cña qu¸ tr×nh thiÕt kÕ ch©n lµ t×m kiÕm mét kiÓu ch©n tèi −u nhÊt.
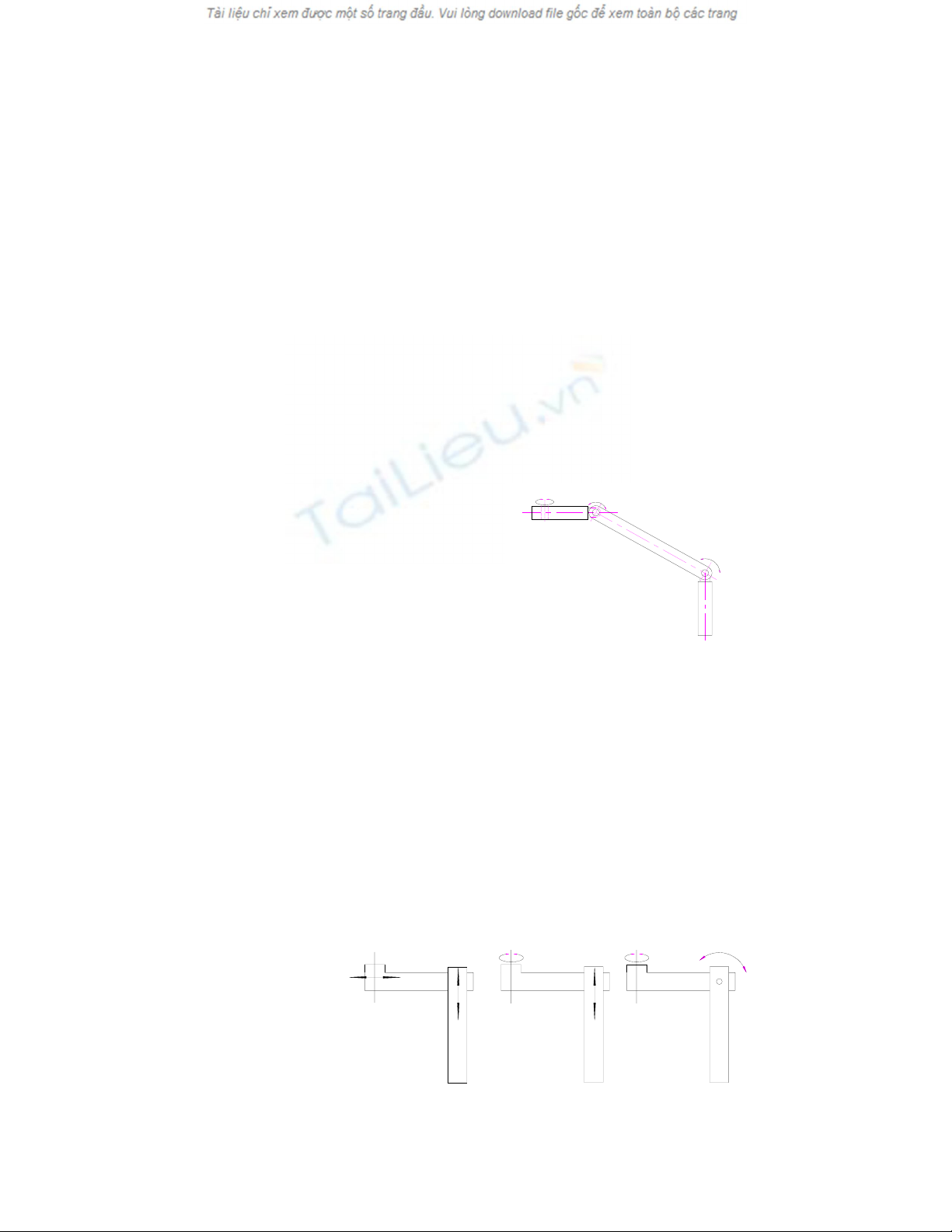
* Ph−¬ng ¸n 1
Trong ph−¬ng ¸n nµy ch©n robot ®−îc
thiÕt kÕ víi sè bËc tù do lµ 3 bËc tù do
®−îc thÓ hiÖn nh− h×nh 1. Nã cã mét
bËc tù do cã t¸c dông vÉy ch©n tíi vµ
lui, mét bËc tù do n©ng h¹ ch©n vµ mét
bËc tù do ë khíp ®Çu gèi.
H×nh 1 C¬ cÊu ch©n 3 bËc tù do
¦u ®iÓm cña ph−¬ng ¸n nµy: C¸c cö ®éng cña ch©n sÏ linh ho¹t h¬n, di chuyÓn dÓ dµng trong
®Þa h×nh thay ®æi phøc t¹p, linh ho¹t h¬n trong viÖc ®Æt ch©n vµ cã thÓ c¶m nhËn ®−îc lùc ®Æt
ch©n th«ng qua mét c¶m biÕn lùc ®Æt t¹i bµn ch©n.
Nh−îc ®iÓm ë ®©y lµ t¨ng khèi l−îng thiÕt kÕ cho mçi ch©n, cÇn thªm nguån dÉn ®éng cho
bËc tù do thø ba, phøc t¹p h¬n trong viÖc ®iÒu khiÓn, c¸c m¹ch xö lý nhiÒu h¬n vµ n¨ng l−îng
tiªu thô nhiÒu h¬n. Ngoµi ra momen cÇn cho ®éng c¬ ph¶i ®ñ lín, v× nã ph¶i mang thªm t¶i lµ
bËc tù do thø ba. Gi¸ thµnh chÕ t¹o mçi ch©n sÏ t¨ng lªn.
Ph−¬ng ¸n nµy tuy cã nhiÒu −u ®iÓm nh−ng l¹i qu¸ phøc t¹p cho viÖc dÉn ®éng vµ ®iÒu khiÓn
nªn khã kh¶ thi ®èi víi ph¹m vi ®Ò tµi nµy.
* Ph−¬ng ¸n 2
Trong ph−¬ng ¸n hai kÕt cÊu ch©n robot ®−îc thiÕt kÕ víi 2 bËc tù do nªn robot sÏ kÐm linh
ho¹t h¬n ch©n 3 bËc tù do. Tuy nhiªn, −u ®iÓm lµ kÕt cÊu ®¬n gi¶n, dÔ chÕ t¹o, dÔ ®iÒu khiÓn,
gi¸ thµnh cho mçi ch©n thÊp h¬n. Trong ph¬ng ¸n nµy ta l¹i kh¶o s¸t 3 tr−êng hîp thiÕt kÕ
ch©n nh− sau:
H×nh 2 C¬ cÊu ch©n 2 bËc tù do
Víi tr−êng hîp a) ta nhËn thÊy hai bËc tù do cho hai kh©u lµ tÞnh tiÕn, ®iÒu nµy sÏ khã kh¨n
trong qu¸ tr×nh di chuyÓn. Víi tr−êng hîp b) th× hai bËc tù do cho hai kh©u lµ xoay vµ tÞnh
tiÕn, tr−êng hîp nµy cã −u ®iÓm h¬n tr−êng hîp a) nh−ng vÉn kÐm linh ho¹t h¬n tr−êng hîp
c). §©y lµ tr−êng hîp mµ c¶ hai bËc tù do ®Òu lµ chuyÓn ®éng xoay quanh khíp. Do ®ã, ®©y sÏ
lµ ph−¬ng ¸n lùa chän cho walking robot.
Ngoµi ra cßn nhiÒu kiÓu thiÕt kÕ ch©n walking robot, nh−ng trong ph¹m vi bµi b¸o nµy chóng
t«i chØ cã thÓ nªu hai ph−¬ng ¸n trªn.
2.2/ Th©n d¹ng h×nh ch÷ nhËt
Víi d¹ng th©n h×nh ch÷ nhËt th× c¸c ch©n
®−îc bè trÝ ®Òu theo c¸c c¹nh dµi cña h×nh
ch÷ nhËt. Th©n robot d¹ng nµy dÔ chÕ t¹o vµ
phï hîp víi c¸c lo¹i walking robot cã mËt
®é ®i ®−êng th¼ng nhiÒu h¬n ®i ®−êng cong.
V× khi di chuyÓn theo ®−êng cong sÏ gÆp
nhiÒu khã kh¨n trong viÖc x©y dùng gi¶i
thuËt ®iÒu khiÓn vµ ch−¬ng tr×nh ®iÒu khiÓn
c¸c ch©n sÏ phøc t¹p h¬n di theo ®−êng
th¼ng.
H×nh 3 Th©n d¹ng h×nh ch÷ nhËt
2.3/ Chän ®éng c¬
§Ó t¹o nguån dÉn ®éng cho hai bËc tù do cña ch©n ta cÇn trang bÞ c¸c ®éng c¬. §Ó ®¬n gi¶n vµ
dÔ dµng trong ®iÒu khiÓn th× mçi bËc tù do sÏ cã mét ®éng c¬ ®Ó dÉn ®éng. C¸c lo¹i ®éng c¬
cã thÓ dïng ®−îc lµ:
§éng c¬ b−íc, lo¹i nµy ®−îc ®iÒu khiÓn b»ng c¸c xung rêi r¹c vµ cã gãc xoay nhá dÔ dµng
trong qu¸ tr×nh ®iÒu khiÓn ch©n, ®©y lµ mét −u ®iÓm. Tuy nhiªn, ®éng c¬ nµy cã träng l−îng
qu¸ nÆng vµ momen qu¸ yÕu. Nh− vËy, khèi l−îng cña ch©n sÏ t¨ng thªm v× vËy g©y khã kh¨n
trong viÖc chÕ t¹o robot.
§éng c¬ DC servo lo¹i ®éng c¬ DC cã encorder ®Ó kiÓm so¸t sè vßng quay cña ®éng c¬ tøc lµ
kiÓm so¸t hµnh tr×nh mµ ch©n robot ®· di chuyÓn ®−îc. Víi lo¹i nµy th× khèi l−îng nhÑ h¬n vµ
cã thÓ dÓ dµng chän lùa lo¹i ®éng c¬ mong muèn.
2.4/ Chän d¹ng truyÒn ®éng
NÕu momen cña ®éng c¬ qu¸ nhá kh«ng ®ñ ®Ó mang t¶i th× cÇn ph¶i cã bé truyÒn ®Ó t¨ng
momen. C¸c d¹ng bé truyÒn cã thÓ sö dông ®−îc lµ: b¸nh r¨ng hoÆc trôc vÝt b¸nh vÝt
* Bé truyÒn b¸nh r¨ng
¦u ®iÓm: KÝch th−íc nhá, kh¶ n¨ng t¶i lín. TØ sè truyÒn kh«ng thay ®æi do kh«ng cã hiÖn
t−îng tr−ît tr¬n. HiÖu suÊt cao h=0.97-0.99. Lµm viÖc víi vËn tèc lín(®Õn 150 m/s), c«ng suÊt
lín. Tuæi thä cao, lµm viÖc víi ®é tin cËy cao.
KhuyÕt ®iÓm: ChÕ t¹o t−¬ng ®èi phøc t¹p. §ßi hái ®é chÝnh x¸c cao. Cã nhiÒu tiÕng ån khi
ho¹t ®éng víi vËn tèc lín.
* Bé truyÒn trôc vÝt - b¸nh vÝt:
Bé truyÒn trôc vÝt b¸nh vÝt cã −u ®iÓm lµ tØ sè truyÒn lín, lµm viÖc ªm, kh«ng ån, cã kh¶ n¨ng
tù h·m vµ cã ®é chÝnh x¸c ®éng häc cao.
KhuyÕt ®iÓm lµ hiÖu suÊt thÊp, sinh nhiÖt nhiÒu do cã vËn tèc tr−ît lín nªn ph¶i tÝnh nhiÖt cho
bé truyÒn trôc vÝt vµ kÌm theo c¸c biÖn ph¸p lµm nguéi.
ñoäng cô
ñoäng cô
Caëp t r uïc vít - baùnh vít naâng haï chaân
Caëp tr uïc vít - baùnh vít vaãy chaân
T L
Thôøi gian
Toác ñoä
Chóng t«i nhËn thÊy bé truyÒn
Trôc vÝt-B¸nh vÝt cã nhiÒu −u ®iÓm h¬n bé
truyÒn b¸nh r¨ng. §Æc biÖt, lµ kh¶ n¨ng tù
h·m, v× c¸c chuyÓn ®éng cña ch©n robot lµ
c¸c chuyÓn ®éng cÇn cã ®iÓm dõng vµ khi
kh«ng cßn t¸c ®éng cña ®éng c¬ th× ph¶i
®¶m b¶o sao cho kÕt cÊu ch©n cßn kh¶
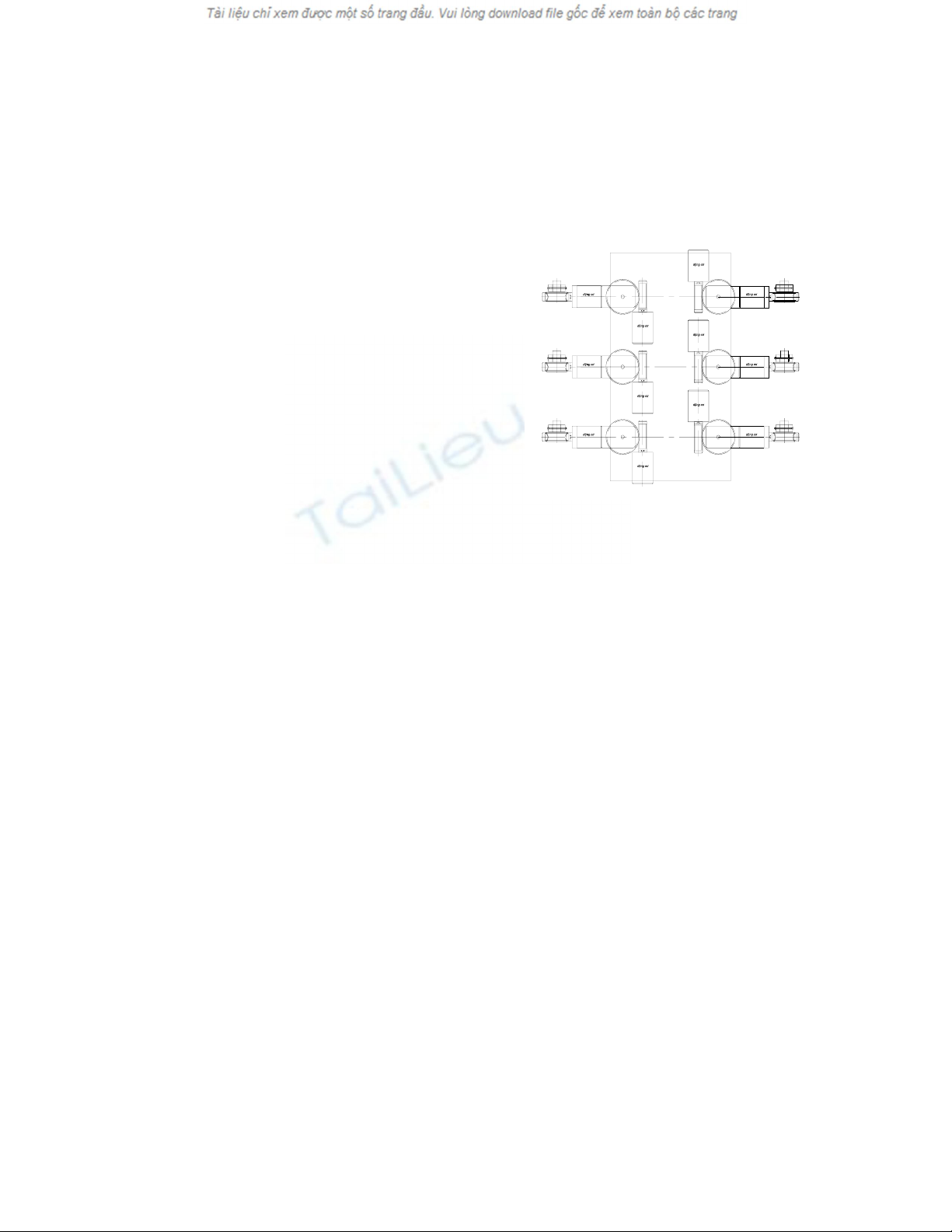
n¨ng gi÷ t− thÕ ®øng v÷ng cña robot. S¬
®å bè trÝ ®éng c¬ trªn th©n robot vµ bé
phËn truyÒn ®éng cho c¸c bËc tù do vÉy vµ
n©ng h¹ ch©n ®−îc tr×nh bµy trong h×nh 4
H×nh 4 S¬ ®å bè trÝ ®éng c¬ vµ bé phËn truyÒn ®éng
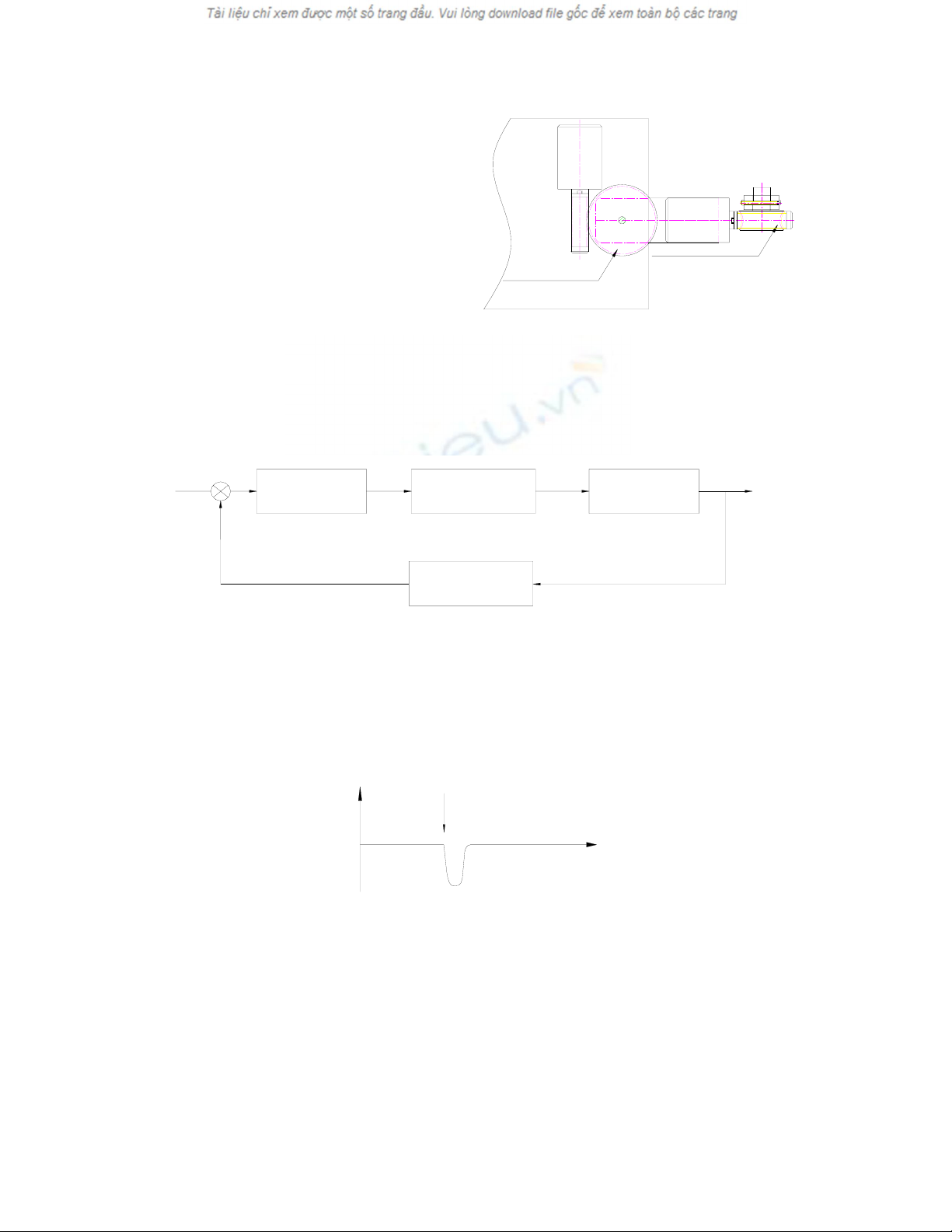
2.5/ C¸c chØ tiªu cña hÖ thèng ®iÒu khiÓn :
Trong phÇn nµy ta kh¶o s¸t mét hÖ thèng ®iÒu khiÓn th−êng hay gÆp trong ®iÒu khiÓn thiÕt bÞ
®ã lµ hÖ thèng ®iÒu khiÓn vßng kÝn.
Driver Motor ñoäng cô
hoài tieáp
Caûm bieán toác ñoä
Maïch vi xöû lyù ω
ω eω r
H×nh 5 HÖ thèng ®iÒu khiÓn vßng kÝn
Víi hÖ thèng trªn ta nhËn thÊy tèc ®é ®Çu ra cña ®éng c¬ ®−îc kiÓm so¸t bëi bé c¶m biÕn tèc
®é vµ tèc ®é nµy sÏ ®−îc so s¸nh víi tèc ®é mong muèn lµ r
ω
bÊt cø mét sù sai lÖch nµo ®Òu
®−îc ph¸t hiÖn vµ hiÖu chØnh th«ng qua bé c¶m biÕn tèc ®é vµ so s¸nh. HÖ thèng nµy sÏ cho ta
c¸ch ®iÒu khiÓn chÝnh x¸c gi¸ trÞ gãc quay cña ®éng c¬ hay gi¸ trÞ chÝnh x¸c b−íc ®i cña
robot. Sau ®©y lµ biÓu ®å ®¸p øng thêi gian cña tèc ®é d−íi ¶nh h−ëng cña momen t¶i.
H×nh 6 BiÓu ®å ®¸p øng cña hÖ thèng ®iÒu khiÓn vßng kÝn
H×nh 6 cho thÊy khi ®éng c¬ mang t¶i tèc ®é ®éng c¬ cã gi¶m xuèng nh−ng trong mét
thêi gian ng¾n råi l¹i gi÷ gi¸ trÞ nh− tr−íc.
Thùc hiÖn thµnh c«ng mét hÖ thèng ®iÒu khiÓn sÏ cã nh÷ng ®Æc tr−ng sau ®©y:
+ Ph¶i thiÕt kÕ theo d¹ng m«®un cho tõng bé phËn riªng biÖt, nh−ng th«ng th−êng bé
®iÒu khiÓn trung t©m cã kh¶ n¨ng giao tiÕp trao ®æi th«ng tin réng r·i víi tÊt c¶ m«®un
bé phËn.
+ Bé giao tiÕp ph¶i lµ thiÕt bÞ ®éc lËp, nh− thÕ thiÕt bÞ phÇn cøng sÏ nhËn ®−îc d÷ liÖu
th«ng qua card l−u tr÷ d÷ liÖu. Chóng ®−îc n¹p vµo bé ®iÒu khiÓn nh− lµ bé vi xö lý
AT89C51 cña Atmel, hay nh÷ng bé ®iÒu khiÓn víi c«ng nghÖ míi h¬n.


![Bài giảng Robot và điều khiển chuyển động [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151012/nganga_07/135x160/3471444660919.jpg)





















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)