DepartmentofAppliedMechanics
CHAPTER Cơhọckỹthuật:ĐỘNGLỰCHỌC
EngineeringMechanics:KINETICS
Mộtsốnguyênlýcơ học
BộmônCơhọcứngdụng
DepartmentofAppliedMechanics
Cơhọckỹthuật
ĐỘNGLỰCHỌC
EngineeringMechanics
KINETICS
ĐỘNGLỰCHỌC:
MỘTSỐNGUYÊNLÝCƠHỌC
GV:NguyễnQuangHoàng
DepartmentofAppliedMechanics 3
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
CÁCKHÁINIỆM
1. Cơhệkhôngtựdo,liênkếtvàphânloạiliênkết
2. Dichuyểnảo–bậctựdo–tọađộsuyrộng
3. Côngảo–lựcsuyrộng–liênkếtlýtưởng
DepartmentofAppliedMechanics 4
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
1.Cơhệkhôngtựdo,Liênkếtvàphânloạiliênkết
Cơhệkhôngtựdohaycòngọilàcơhệchịuliênkếtlàcơhệmàvịtrívàvậntốccủacácđiểmthuộchệbị
ràngbuộcbởimộtsốđiềukiệnvềhìnhhọcvàđộnghọc.
Liênkếtlànhữngđiềukiệnràngbuộcđặtlênchuyểnđộngcủacácđiểmvàcácvậtrắnthuộccơhệ.Các
ràngbuộcnàythườngđượcbiểudiễnbằngcácphươngtrìnhhoặcbấtphươngtrình.
C
v
r
A
BA
By
fr r
frr l
fre
22
1
22
2
3
() 0,
() 0,
0
=-=
=- -=
=⋅=
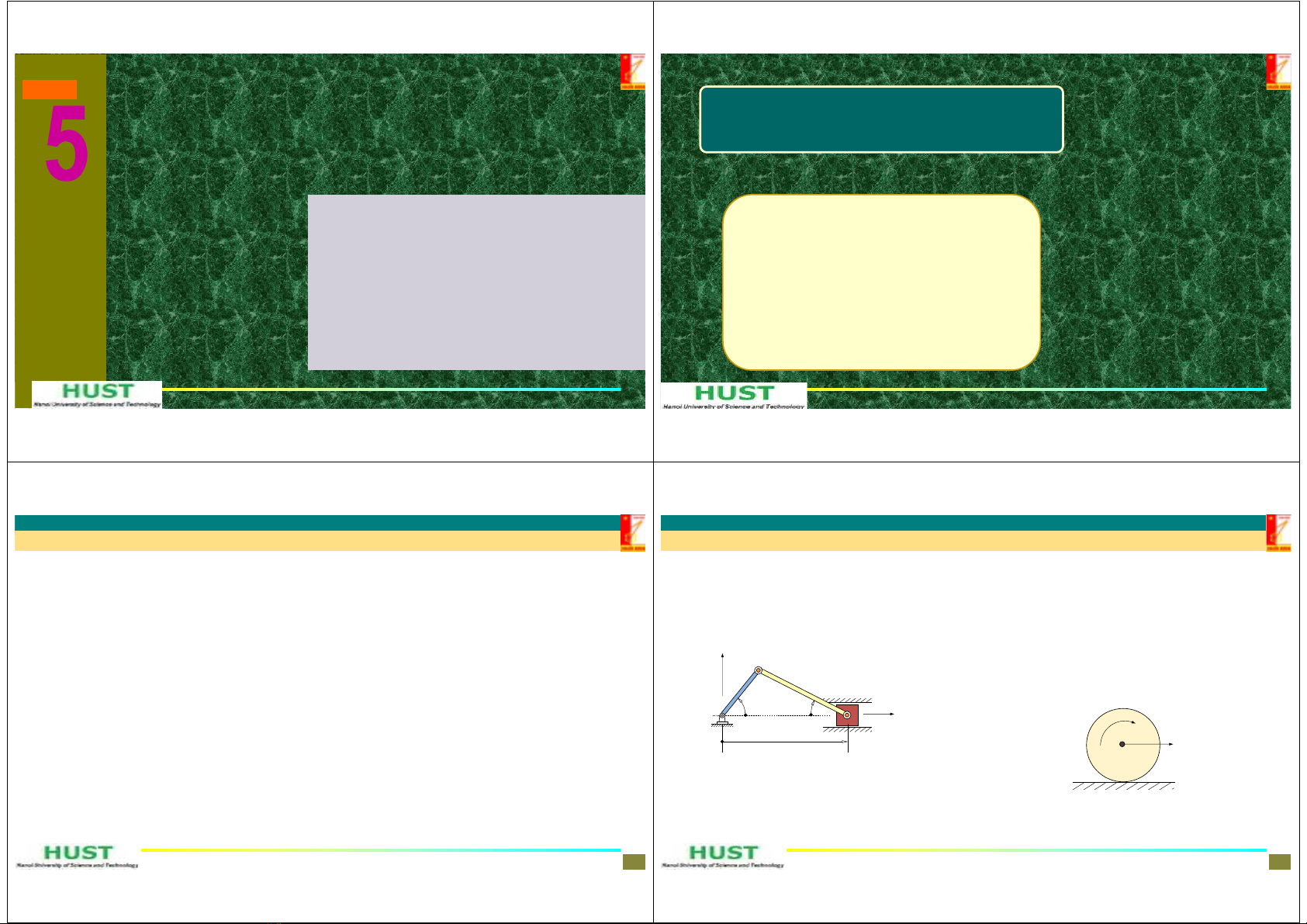
10
f
vrw=- =
đốivớiđĩalănkhông
trượttrênnền
O
B
A
rl
x
,x
xe
,y
ye
DepartmentofAppliedMechanics 5
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
1.Cơhệkhôngtựdo,Liênkếtvàphânloạiliênkết
s
O
rM
Ox
y
l
z
11
00fvr fsrwj=- = =- =
22
1() 0
M
fl r=- ³
đốivớihệtờikéo,khidâykhôngdãn dâytreokhôngdãn,cóthểtrùng
Viếtmộtcáchtổngquát,phươngtrìnhliênkếtđượcviếtdạngnhưsau:
11
( ,.., ,.., , ,.., ,.., , ) 0, 1,2,...,
j
kN k N
f
rrrvv vt j r³=
DepartmentofAppliedMechanics 6
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
1.Cơhệkhôngtựdo,Liênkếtvàphânloạiliênkết
Dựa vào phương trình hay bất phương trình liên kết phân các loại liên kết như sau:
Liên kết giữ và liên kết không giữ [hay còn gọi là liên kết hai phía và liên kết một phía]. Nếu các ràng buộc
được biểu diễn bằng phương trình thì đó là liên kết giữ. Trái lại, nếu ràng buộc được biểu diễn bằng bất
phương trình thì đó là liên kết không giữ.
Liênkếtdừngvàliênkếtkhôngdừng. Nếu trong phương trình liên kết không chứa tường minh biến thời
gian t, thì đó là liên kết dừng. Ngược lại, ta có liên kết không dừng.
Liênkếthôlônômvàliênkếtkhônghôlônôm.Nếu trong phương trình liên kết không chứa biến vận tốc
hoặc nếu có nhưng có thể tích phân để loại bỏ biến vận tốc thì đó là liên kết hô lô nôm (hay liên kết hình
học). Trái lại, nếu trong phương trình liên kết có chứa biến vận tốc mà ta không thể loại bỏ được thì đó là
liên kết không hô lô nôm (hay còn gọi là liên kết động học).
Trong phạm vi giáo trình chúng ta chỉ xem xét các cơ hệ chịu liên kết hô lô nôm và dừng.
1
( ,.., ,.., ) 0, 1,2,...,
j
kN
f
rrr j r==
Liênkếthôlônômlàliênkếtgiữvàkhôngchứabiếnvậntốc.
DepartmentofAppliedMechanics 7
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
1.Cơhệkhôngtựdo,Liênkếtvàphânloạiliênkết
Liênkếtgiữvàliênkếtkhônggiữ
Liênkếtdừngvàliênkếtkhôngdừng
Liênkếthôlônômvàliênkếtkhônghôlônôm.
11
( ,.., ,.., , ,.., ,.., , ) 0, 1,2,...,
jkN kN
fr r r v v v t j r³=
11
( ,.., ,.., , ,.., ,.., , ) 0,
jkN kN
fr r r v v v t=
11
( ,.., ,.., , ,.., ,.., , ) 0,
jkN kN
fr r r v v v t³
11
( ,.., ,.., , ,.., ,.., ) 0,
jkN kN
fr r r v v v ³
11
( ,.., ,.., , ,.., ,.., , ) 0,
jkN kN
fr r r v v v t³
1
( ,.., ,.., , ) 0,
jkN
fr r r t=
11
( ,.., ,.., , ,.., ,.., , ) 0,
jkN kN
fr r r v v v t³
1
( ,.., ,.., ) 0, 1,2,...,
j
kN
f
rrr j r==
Liênkếthôlônômvàdừng
DepartmentofAppliedMechanics 8
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
1.Cơhệkhôngtựdo,Liênkếtvàphânloạiliênkết
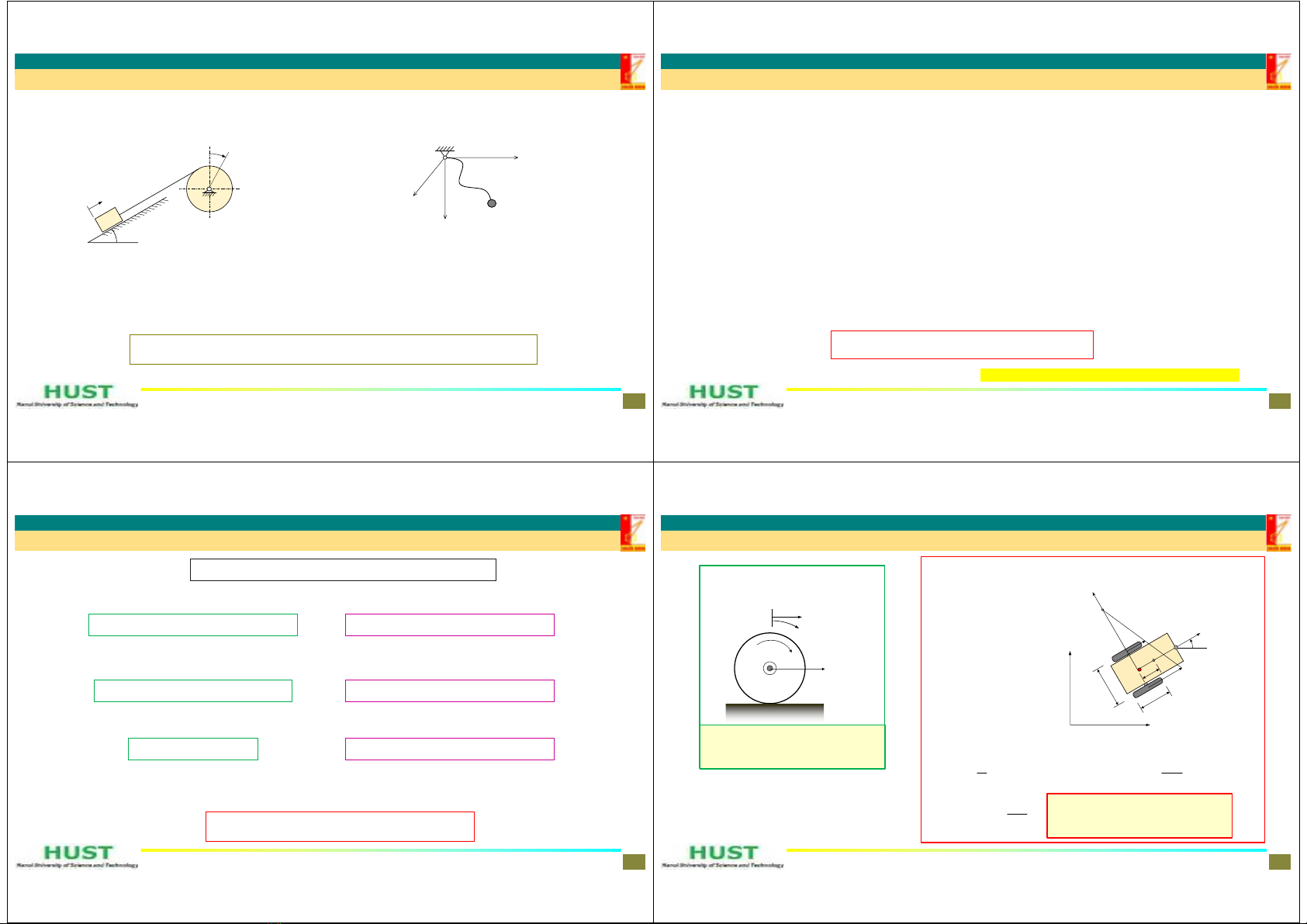
Vídụvềliênkếthôlônôm
x0
y0
O0
2L
2r
Ob
xb
ybP
vR
vL
C
d
O
vr srwj==
Vídụvềliênkếtkhônghôlônôm
11
(), ()
22
ORLb RL
vvvx vv
L
wy=+ == -
tan sin cos 0
O
OO
O
yxy
x
yyy= - =
v
x
DepartmentofAppliedMechanics 9
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
2.Dichuyểnảo– bậctựdo– tọađộsuyrộng
Dichuyểnảocủachấtđiểm
Dichuyểnảocủađiểmlàdichuyểnvôcùngbétưởngtượngtừvịtríđangxétsangcácvịtrílâncậnvàphù
hợpvớiliênkếttạithờiđiểmđangxét.
Lưuý:cácđặcđiểmcủadichuyểnảolà
1. vôcùngbé,
2. tưởngtượng,và
3. phùhợpliênkếttạithờiđiểmkhảosát.
A
O
B
x
y
A
rd
B
rd
xyz
rxe ye zedd d d=++
v
M
Sàn chuyển động, điểm M trên
mặt sàn. Khi xét di chuyển ảo
của điểm M, ta coi “thời gian
nhưdừnglại”(coisànnhưdừng
lại).
rd
,x
xe
,y
ye
,z
ze
DepartmentofAppliedMechanics 10
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
2.Dichuyểnảo–bậctựdo–tọađộsuyrộng
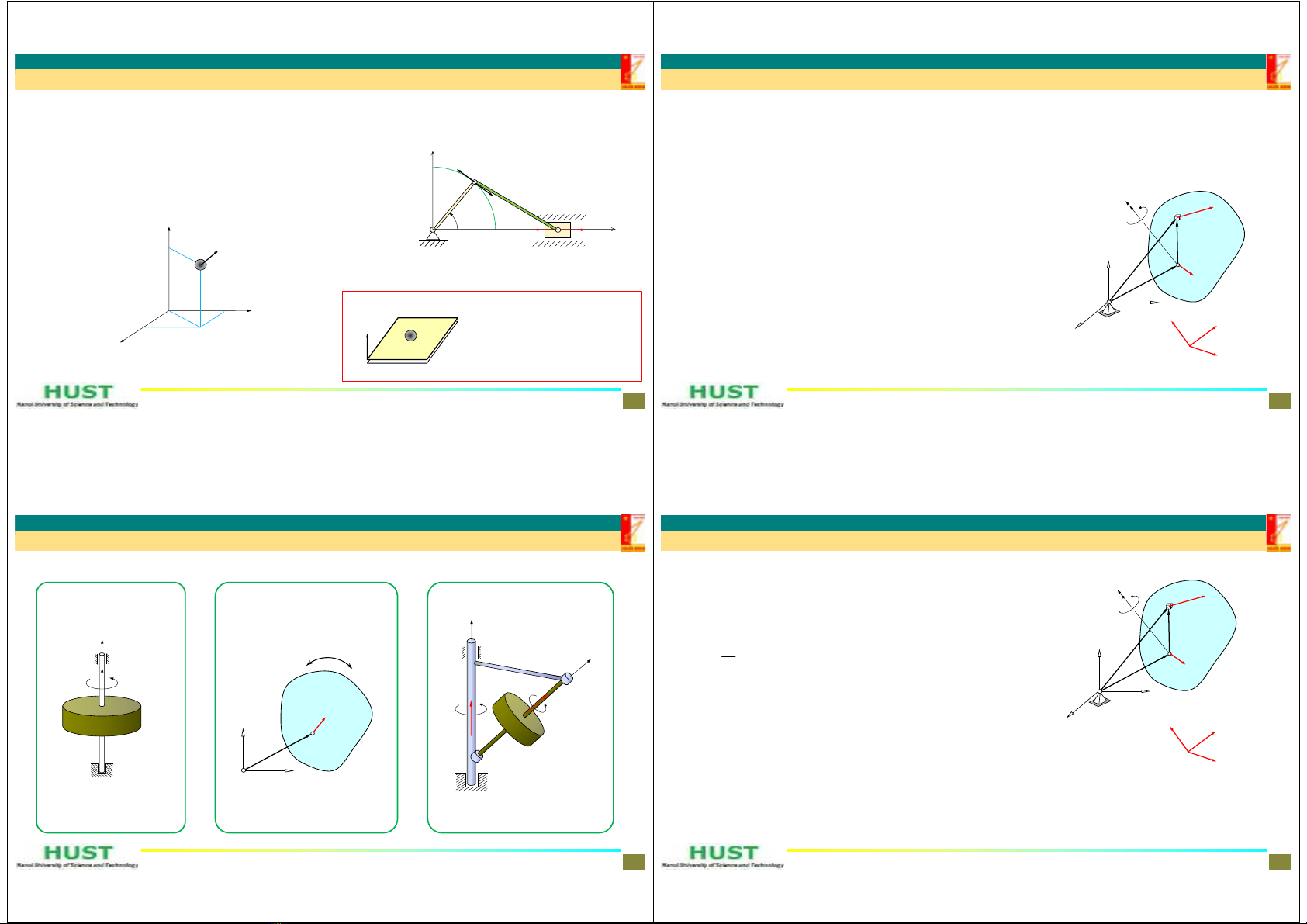
Dichuyểnảocủavậtrắn
Di chuyển ảo của vật rắn là những di chuyển vô cùng bé tưởng tượng của vật rắn từ vị trí đang xét sang
các vị trí lân cận và phù hợp với liên kết tại thời điểm đang xét.
1
e
3
e
2
e
A
rd
A
P
O’
P
rd
w
r
A
r
u
A
rd
dj
Dichuyểnảocủavậtrắnbaogồmdichuyểnảocủa
điểmcựcAvàdichuyểnquayảoquanhtrụcnàođóqua
điểmcựcA:(trụcchứavéctơvậntốcgóc?)
,
A
rddj
Trongmộthệtrụctọađộcócơsở 123
[,, ]
T
eee=e
T
AA A A A
T
xyz
rxeyeze
eee
123
12
dd d d d
dj dj dj dj d
=++=
=++=
er
e
DepartmentofAppliedMechanics 11
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
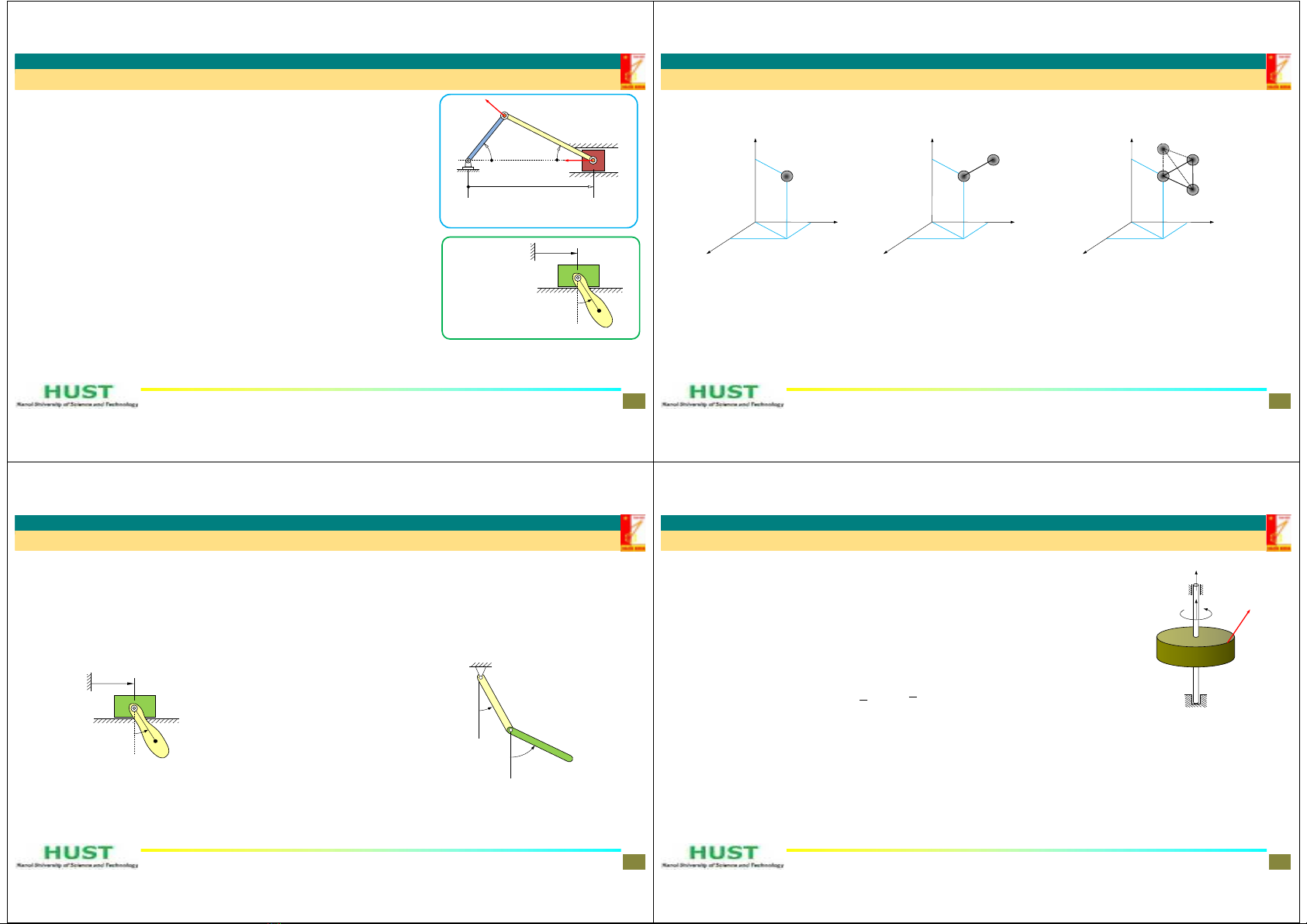
2.Dichuyểnảo–bậctựdo–tọađộsuyrộng
Vídụ
Vậtrắnquayquanh
trụccốđịnh
z
e
dq
z
edj dq=
Vậtrắnquayquanh2
trụcgiaonhau
0zz
eedj dq db=+
db
0z
e
z
e
dq
z0
z
A
rd
A
O
A
r
A
rd
dj
Vậtrắnchuyểnđộng
phẳng
,
A
rddj
DepartmentofAppliedMechanics 12
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
2.Dichuyểnảo– bậctựdo– tọađộsuyrộng
Dichuyểnảocủađiểmthuộcvậtrắn
1
e
3
e
2
e
A
rd
A
P
O’
P
rd
w
r
A
r
u
A
rd
dj
Trongmộthệtrụctọađộcócơsở 123
[,, ]
T
eee=e
,
T
PA P PPA
rr u rdddj d dddd=+´= =+er r r u
j
DichuyểnảocủađiểmPbấtkỳthuộcvật
PA P A
rru r r uddd=+ = +
du u du dt u du d u
dt ww j=´ = ´ = ´
PA A
uu
rrur u
ddj
dddddj
=´
=+=+´
DepartmentofAppliedMechanics 13
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
2.Dichuyểnảo–bậctựdo–tọađộsuyrộng
Dichuyểnảocủacơhệ(Nchấtđiểmpvậtrắn)
Đối với cơ hệ tự do: tập các di chuyển ảo trên là độc lập tuyến tính.
Còn đối với cơ hệ không tự do (chịu liên kết): tập các di chuyển ảo
trên là không độc lập tuyến tính.
(
)
1
12 1
, ,..., , , ,..., ,
p
nA A p
rr r r rdd d d dj d dj
Di chuyển ảo của cơ hệ là tập các di chuyển ảo của các chất điểm và
các vật rắn thuộc hệ từ vị trí đang xét sang các vị trí lân cận và phù
hợp với liên kết tại thời điểm đang xét.
Bậctựdocủacơhệ
Bậc tự do của cơ hệ là số tối đa các di chuyển ảo độc lập.
Ví dụ một điểm tự do trong không gian 3D có ba bậc tự do vì nó
có thể di chuyển được tùy ý trong không gian. Khi có ràng buộc
đặt lên điểm này số bậc tự do của nó giảm. f=bậctựdocủacơhệ
s
C
A
(
)
,sddj
2f=
O
B
A
x
A
rd
B
rd
(
)
,,,
AB
rrdddjdq
1f=
DepartmentofAppliedMechanics 14
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
2.Dichuyểnảo– bậctựdo– tọađộsuyrộng
Bậctựdocủacơhệ
HệNchấtđiểm,khoảngcáchgiữahaichấtđiểmkhôngđổi.
1
3
N
f
=
=
2, 1
5
Nr
f
==
=
3, 3
6
Nr
f
==
=
3, 3( 2) : 3 3( 2) 6NrN fNN³=- =--=
Vật rắn tự do trong không gian có bậc tự do 6f=
DepartmentofAppliedMechanics 15
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
2.Dichuyểnảo–bậctựdo–tọađộsuyrộng
Tọađộsuyrộng
Tọa độ suy rộng là bộ các thông số đủ để xác định vị trí của cơ hệ, khi biết bộ thông số này vị trí của hệ
hoàn toàn được xác định. Các tọa độ suy rộng thường được ký hiệu bởi véc tơ
s
C
A
O
A
B
12
[ , ,..., ]
T
m
qq q=qTọa độ suy rộng đủ: m = f
Tọa độ suy rộng dư: m > f
2
2: [ , ]
4: [, , , ]
T
T
CC
f
ms
msxy
j
j
=
==
==
q
q
2
2: [ , ]
4: [ , , , ]
T
T
AABB
f
m
mxyxy
jq
=
==
==
q
q
DepartmentofAppliedMechanics 16
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
3.Côngảo–liênkếtlýtưởng–lựcsuyrộng
Công ảo là công của lực khi điểm đặt của nó thực hiện di chuyển ảo.
xyz
AFr FxFyFzddddd=⋅ = + +
Công ảo của ngẫu lực tác dụng lên vật rắn
xx yy zz
Am m m mddjdjdjdj=⋅ = + +
Côngảocủalựctácdụnglênvậtrắnquayquanhtrụccốđịnh
()
z
AFr mFdd dq=⋅ = ⋅
Liênkếtlýtưởng
Liên kết giữ được gọi là lý tưởng nếu tổng công ảo của các lực
liên kết trong mọi di chuyển ảo của cơ hệ đều bằng không:
1
0,
N
cc
kk k
k
AFr Fdd
=
=⋅=
å
cáclựcliênkết
e
dq
F
DepartmentofAppliedMechanics 17
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
3.Côngảo–liênkếtlýtưởng–lựcsuyrộng
Lựcsuyrộng
Gọi là tọa độ suy rộng đủ của cơ hệ chịu liên kết hôlônôm và dừng. Như thế vị trí một
điểm bất kỳ thuộc hệ sẽ là hàm của tọa độ suy rộng:
Tổngcôngảocủacáclựchoạtđộngtrongcácdichuyểnảo
12
[ , ,..., ]
T
n
qq q=q
12
1
( , ,..., )
n
k
kk n k i
ii
r
rrqq q r q
q
dd
=
¶
==
¶
å
111 1
NnN n
k
kk k i ii
kik k
i
r
AFr F q Qq
q
dd dd
=== =
æö
¶÷
ç÷
=⋅= ⋅ =
ç÷
ç÷
ç¶
èø
ååå å
11
, 1,2,...,
NN
kkkk
i k kx ky kz
kk
iiii
rxyz
QF F F F i n
qqqq
==
æö
¶¶¶¶
÷
ç÷
=⋅= + + =
ç÷
ç÷
ç
¶¶¶¶
èø
åå
làlựcsuyrộngcủacáclựchoạtđộngứngvớitọađộsuyrộngqi.
O
A
B
x
y
a1
l1
a2l2F
2
P
1
P
12 1 2
12 1 2
sin sin cos cos
cos cos sin sin
BB
BB
xl l xl l
yl l yl l
jqd jdj qdq
jqd jdjqdq
=+ = +
=- - = +
DepartmentofAppliedMechanics 18
Mộtsốnguyênlýcơ học– SomemechanicalPrinciples
3.Côngảo–liênkếtlýtưởng–lựcsuyrộng
Cáchtínhlựcsuyrộng
1.Tínhtheocôngthức
0, 0, ( )
ij
qq jidd¹="¹
12
, ( , ,..., )
ct
in
i
Qqqq
q
¶P
=- P=P
¶
11
, 1,2,...,
NN
kkkk
i k kx ky kz
kk
iiii
rxyz
QF F F F i n
qqqq
==
æö
¶¶¶¶
÷
ç÷
=⋅= + + =
ç÷
ç÷
ç
¶¶¶¶
èø
åå
2. Cho hệ thực hiện di chuyển ảo đặc biệt
11
NN
kkkk
k i kx ky kz i i i
kk
iiii
rxyz
AF q F F F qQq
qqqq
dd dd
==
æö æ ö
¶¶¶¶
÷÷
çç
÷÷
=⋅ = + + =
çç
÷÷
çç
÷÷
çç
¶¶¶¶
èø è ø
åå
3. Lực suy rộng của các lực có thế
DepartmentofAppliedMechanics 19
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
3.Côngảo–liênkếtlýtưởng–lựcsuyrộng
Vídụ:tínhlựcsuyrộng
12 1 2
12
12
sin sin cos cos
() ( cos) ( cos)
(cos), (cos)
BB
B
kt kt
xl l xl l
A F F x Fl Fl
QFl QFl
jq
jqd jdjqdq
dd jdj qdq
jq
=+= +
== +
==
11 2 1 2
11 21 22
11 21
22
cos ( cos cos )
()coscos
()sin
sin
ct
ct
mga mgl a
ma ml g mag
Qmamlg
Qmag
j
q
jjq
jq
j
j
q
q
P=- - +
=- + -
¶P
=- =- +
¶
¶P
=- =-
¶
11121
222
cos ( ) sin
cos sin
kt ct
kt ct
QQQ Fl mamlg
QQ Q Fl mag
jj j
qq q
jj
qq
=+= - +
=+= -
O
A
B
x
y
a1
l1
a2l2
2
P
1
P
xx
FFe=
12
2, ,
f
qqjq===
?,QQ
jq
Tínhlựcsuyrộngkhôngthế
Tínhlựcsuyrộngcóthế
() BB
AF F r F xddd=⋅ =
DepartmentofAppliedMechanics 20
Mộtsốnguyênlýcơhọc–SomemechanicalPrinciples
NGUYÊNLÝCÔNGẢO
1. Kháiniệmcơ hệcânbằng
2. Nguyênlýcôngảo
3. PTcânbằngchohệchịuliênkếtởdạng
tọađộsuyrộngđủ
4. Vídụápdụng
P
Q
O
AB
C
D
x
y
K
O
B
A
rl
x






![Bài giảng Kỹ thuật nhiệt (Phần 1): Chương 2 - TS. Lê Xuân Tuấn [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250428/latrongkim0609/135x160/9981745850124.jpg)











![Bài giảng Truyền động thủy lực và khí nén [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250728/leminhduc123456/135x160/86371753761074.jpg)

![Bài giảng thực hành Hệ thống truyền lực ô tô [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250728/vijiraiya/135x160/45981753691742.jpg)


