Ch ng 1: H QUY CHI U VÀ L I TR C Đ Aươ Ệ Ế ƯỚ Ắ Ị
•H quy chi u:ệ ế g c to đ và h tr c c s to đ ố ạ ộ ệ ụ ơ ở ạ ộ
đ d a vào đó có th bi u di n đ c t t c các đi m ể ự ể ể ễ ượ ấ ả ể
trong không gian.
•L i tr c đ aướ ắ ị là m t t p h p các đi m c s đã xác ộ ậ ợ ể ơ ở
đ nh to đ – đ cao trong h quy chi u có đ chính ị ạ ộ ộ ệ ế ộ
xác theo yêu c u, đ c b trí v i m t đ phù h p ầ ượ ố ớ ậ ộ ợ
trên ph m vi lãnh th đang xét ạ ổ
•Các lo i h quy chi u:ạ ệ ế
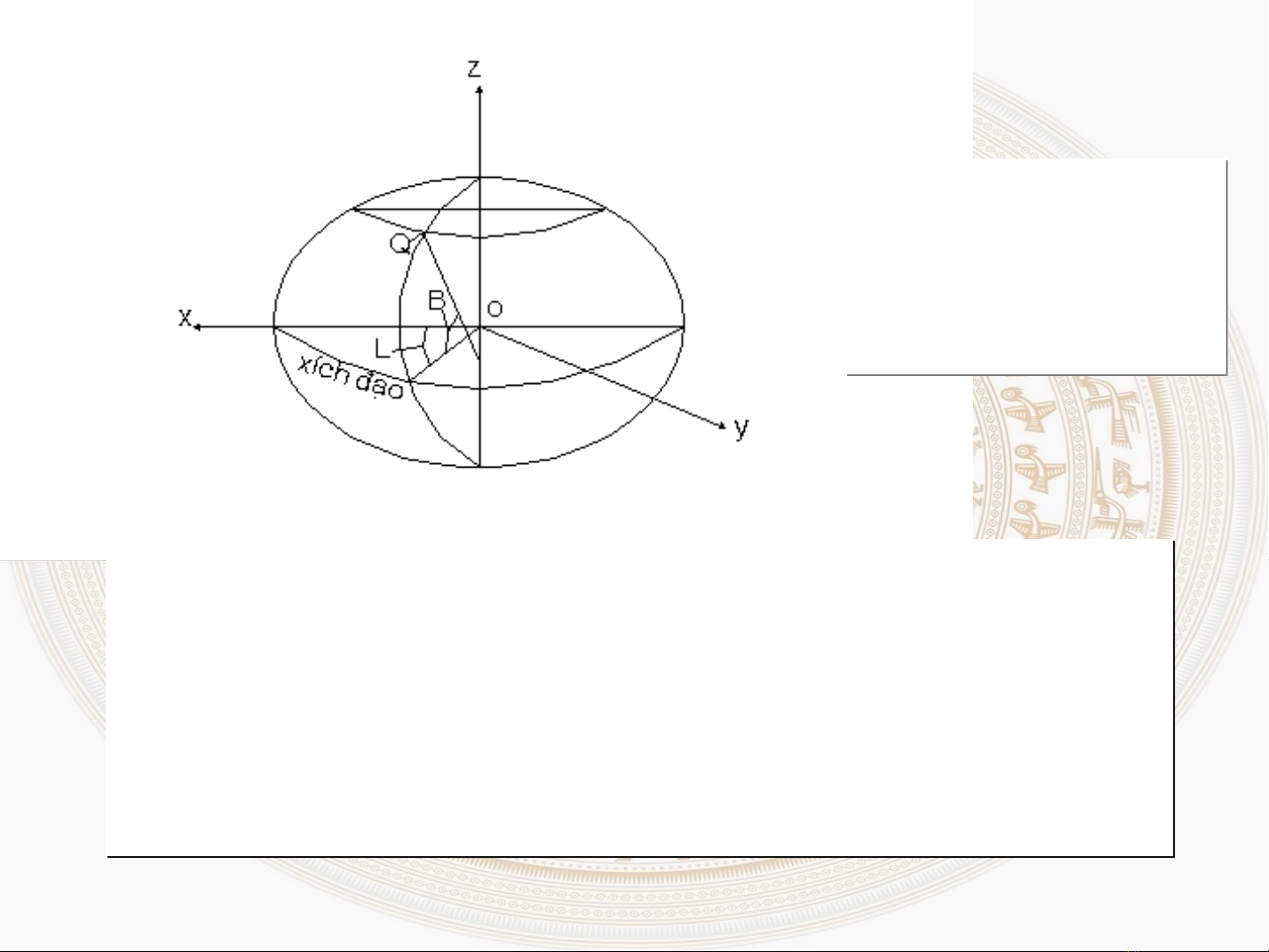
–H quy chi u vuông góc không gian X, Y, Z ệ ế
–H quy chi u m t ellipsoid B,L,Hệ ế ặ
–H quy chi u m t b ng x,y s d ng ch y u cho m c đích ệ ế ặ ằ ử ụ ủ ế ụ
thành l p các lo i b n đ .ậ ạ ả ồ
3