
1
•Nội dung
–C1: Vai trò của mô hình hóa hệ thống
–C2: Khái niệm cơ bản về mô hình hóa hệ thống.
–C3: Phương pháp mô phỏng.
–C4: Mô phỏng hệ thống liên tục.
–C5: Mô hình hóa các hệ ngẫu nhiên.
–C6: Mô phỏng hệ thống hàng đợi.
–Ứng dụng Matlab Simulink trong mô phỏng các
hệ thống điều khiển tự động.
MÔ HÌNH HÓA

2
CHƯƠNG IV: MÔ PHỎNG HỆ THỐNG LIÊN TỤC
4.1.Khái niệm chung về mô hình hệ thống liên tục
Hệ thống liên tục là hệ thống mà trong đó các trạng thái và thuộc tính
của hệ thay đổi liên tục theo thời gian. Chúng thường được biểu diễn
dưới dạng các phương trình vi phân.
4.2.Dùng máy tính tương tự để mô phỏng hệ thống liên tục
* Máy tính tương tự mà chúng ta thường hay gặp là loại máy tính
tương tự điện tử mà phần tử cơ bản của nó là các bộ khuếch đại thuật
toán OP-AMP(Operational Amplifier).
* Điện áp của máy tính biểu thị biến số mô hình toán học.
* Khuếch đại thuật toán có thể làm thành các bộ cộng, tích phân và bộ
đảo dấu điện áp do đó nó có thể giải các phương trình vi phân dùng
để mô hình hóa hệ thống liên tục.

3
CHƯƠNG IV – MÔ PHỎNG HỆ THỐNG LIÊN TỤC
4.2.Dùng máy tính tương tự để mô phỏng hệ thống liên tục
* Ngày nay máy tính tương tự chỉ được sử dụng trong mô phỏng của
hệ thống sản xuất hóa chất, sinh học hoặc dùng trong mô phỏng hỗn
hợp do máy tính tương tự có nhiều hạn chế:
- Độ chính xác của MTTT không cao do sai số của phép đo điện áp tại
các khâu hay do hiện tượng trôi điểm không của khuếch đại thuật
toán.
- Đối với mỗi hệ thống ta phải ghép và hiệu chỉnh các khâu lại theo
đúng pt vi phân của hệ thống. Do đó nó không có tính mềm dẻo khi
cần thay đổi cấu trúc hệ thống.

4
4.2.Dùng máy tính tương tự để mô phỏng hệ thống liên tục
VD: Mô hình hóa hệ thống liên tục được biểu diễn bằng pt vi phân sau:
Giả sử các điều kiện đầu bằng 0 và các hệ số trong pt vi phân đều là hằng
số ta có:
Khi đó ta xây dựng máy tính tương tự gồm các khâu như hình vẽ
5
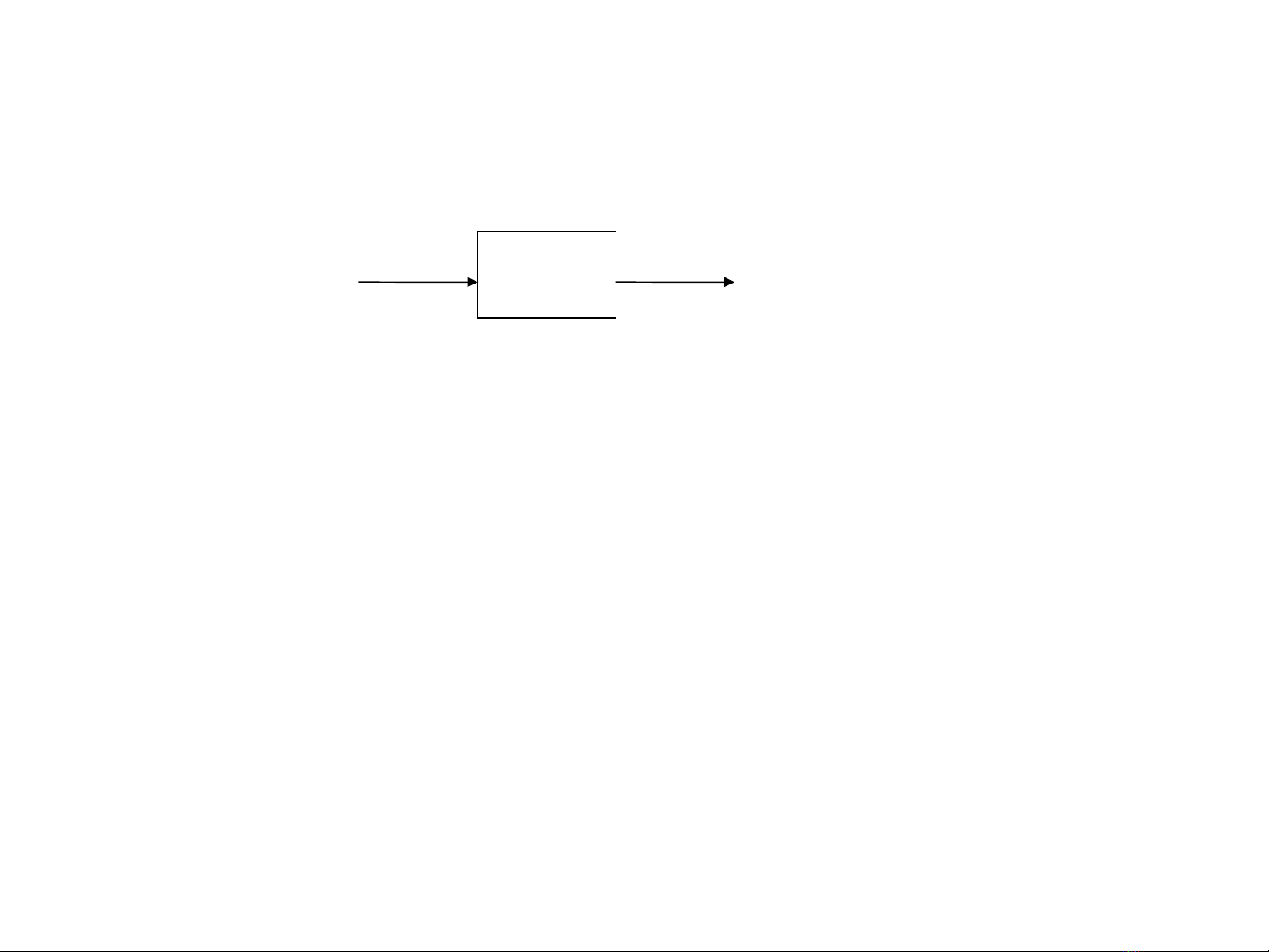
4.3.Dùng máy tính số để mô phỏng hệ thống liên tục
4.3.1. Phương trình máy tính
•Dùng máy tính MT để mô hình hoá các hệ điều khiển ĐKTĐ
•Tín hiệu đầu vào [ Xk ] và tín hiệu ra [ Yk ] của máy tính đều là những tín
hiệu số gián đoạn.
•Bước gián đoạn hoá T (bước cắt mẫu) là nhịp làm việc của MT
•Dãy tín hiệu vào [ XK ] = X(0), X(T), X(2T), … X(kT).
•Dãy tín hiệu ra [ YK ] = Y(0), Y(T), Y(2T), ... Y(kT).
•Giả thiết: [ YK ] hoàn toàn đồng bộ với [ XK ].
Khi tín hiệu ra ở thời điểm k là Y(kT) chỉ tính ảnh hưởng của n tín hiệu ra
và m+1 tín hiệu vào xảy ra trước đó. Các giá trị của m tín hiệu vào và n
tín hiệu ra được lưu trữ trong bộ nhớ của máy tính.
YK
XK MT


![Bài giảng Thiết kế điều khiển 2 [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250516/phongtrongkim0906/135x160/5221747448741.jpg)






















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)