
Bài s 2ố
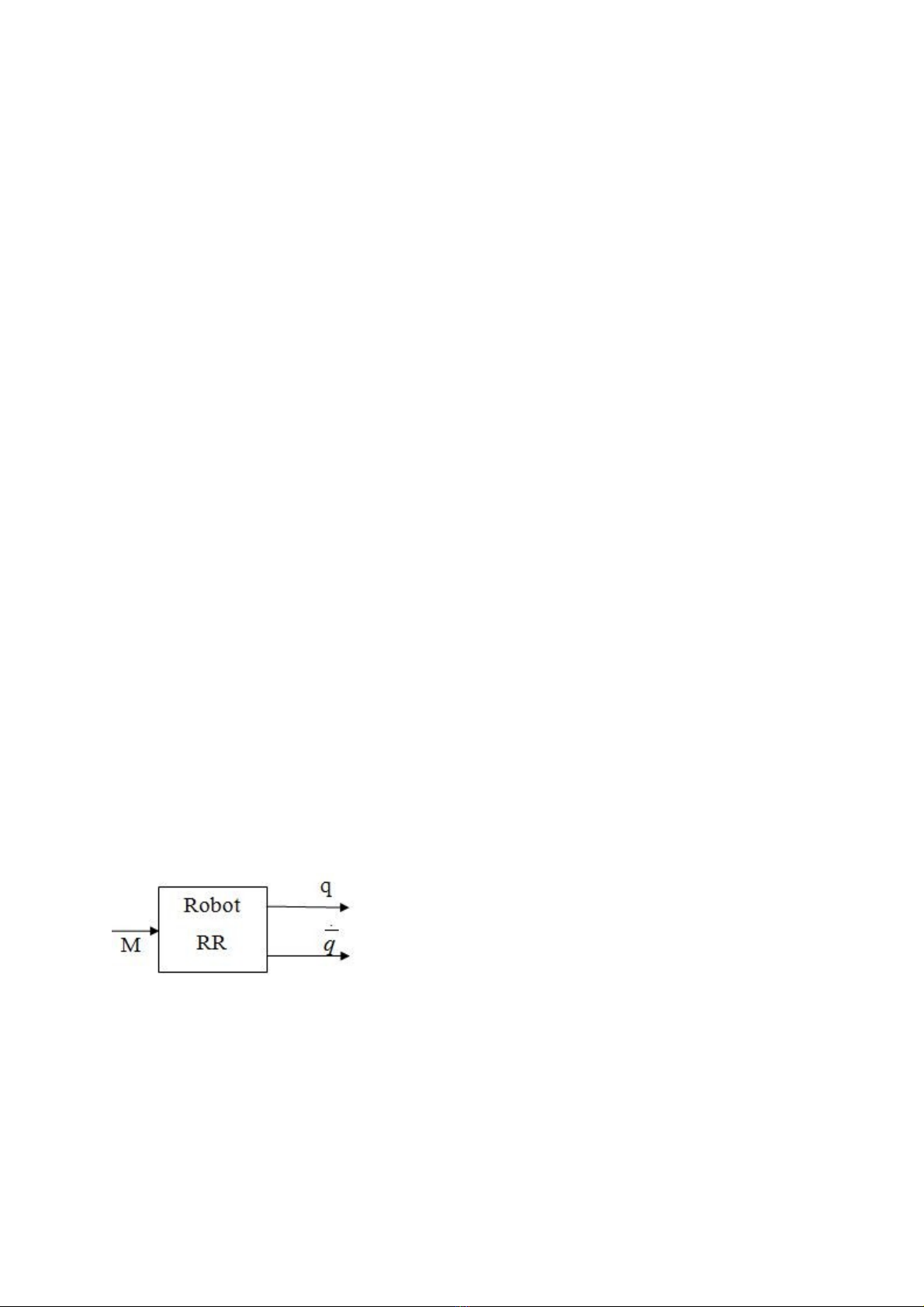
Cho m t c c u robot 2DOF nh hình vộ ơ ấ ư ẽ
S d ng matlab- Simulinkử ụ
1. Xây d ng mô hình toán h c robotự ọ
2. Thi t k b đi u khi n PID bù tr ng tr ng. Ch y mô ph ngế ế ộ ề ể ọ ườ ạ ỏ
S li u c a robot:ố ệ ủ
Chi u dài thanh n i 1: lề ố 1 = 0,5 m
Chi u dài thanh n i 2: lề ố 2 = 0,4 m
Kh i l ng thanh n i 1: mố ượ ố 1 = 1 Kg
Kh i l ng thanh n i 2: mố ượ ố 2 = 1 Kg
Momen quán tính kh p 1 quay quanh tâm kh i: Jớ ố 1 = 0,5 Kgm2
Momen quán tính kh p 2 quay quanh tâm kh i: Jớ ố 2 = 0,5 Kgm2
Kho ng cách t kh p 1 đ n tâm thanh n i 1: lả ừ ớ ế ố g1 = 0,25 m
Kho ng cách t kh p 2 đ n tâm thanh n i 2: lả ừ ớ ế ố g2 = 0,2 m
Góc ban đ u c a các thanh n i: θầ ủ ố 1 = 0 rad ; θ2 = Л/6 rad
Góc đ t c a các thanh n i: θặ ủ ố 1 = Л/3 rad ; θ2 = Л/2 rad

1. Xây d ng mô hình robotự
Gi thi t kh p 1 sinh ra momen Mả ế ớ 1 tác d ng gi a b và thanh n i 1;ụ ữ ệ ố
kh p 2 sinh ra momen Mớ2 tác d ng gi a thanh n i 1 và 2; tr ng l c có h ngụ ữ ố ọ ự ướ
theo tr c yụ
Ký hi u đ ng năng và th năng c a thanh n i i là Kệ ộ ế ủ ố i và Pi (i=1,2)
Ta có:
Đ ng năng thanh n i 1:ộ ố
Th năng thanh n i 1:ế ố
T a đ tâm kh i thanh n i 2:ọ ộ ố ố
T c đ tâm kh i thanh n i 2:ố ộ ố ố
→Bình ph ng t c đ dài tâm thanh n i 2:ươ ố ộ ố
Đ ng năng thanh n i 2:ộ ố
Th năng thanh n i 2:ế ố
Hàm lagrange c a robot:ủ
Mômen c a kh p 1:ủ ớ
Mômen c a kh p 2:ủ ớ
Đ t ặ,
Ta có mô hình toán h c robot:ọ
Trong đó:
: ma tr n quán tínhậ
V i: ớ
: thành ph n momen nh t và h ng tâmầ ớ ướ
: thành ph n momen tr ng l cầ ọ ự
V i: ớ
Th c hi n mô ph ng trên matlab:ự ệ ỏ
Mô hình trên matlab:
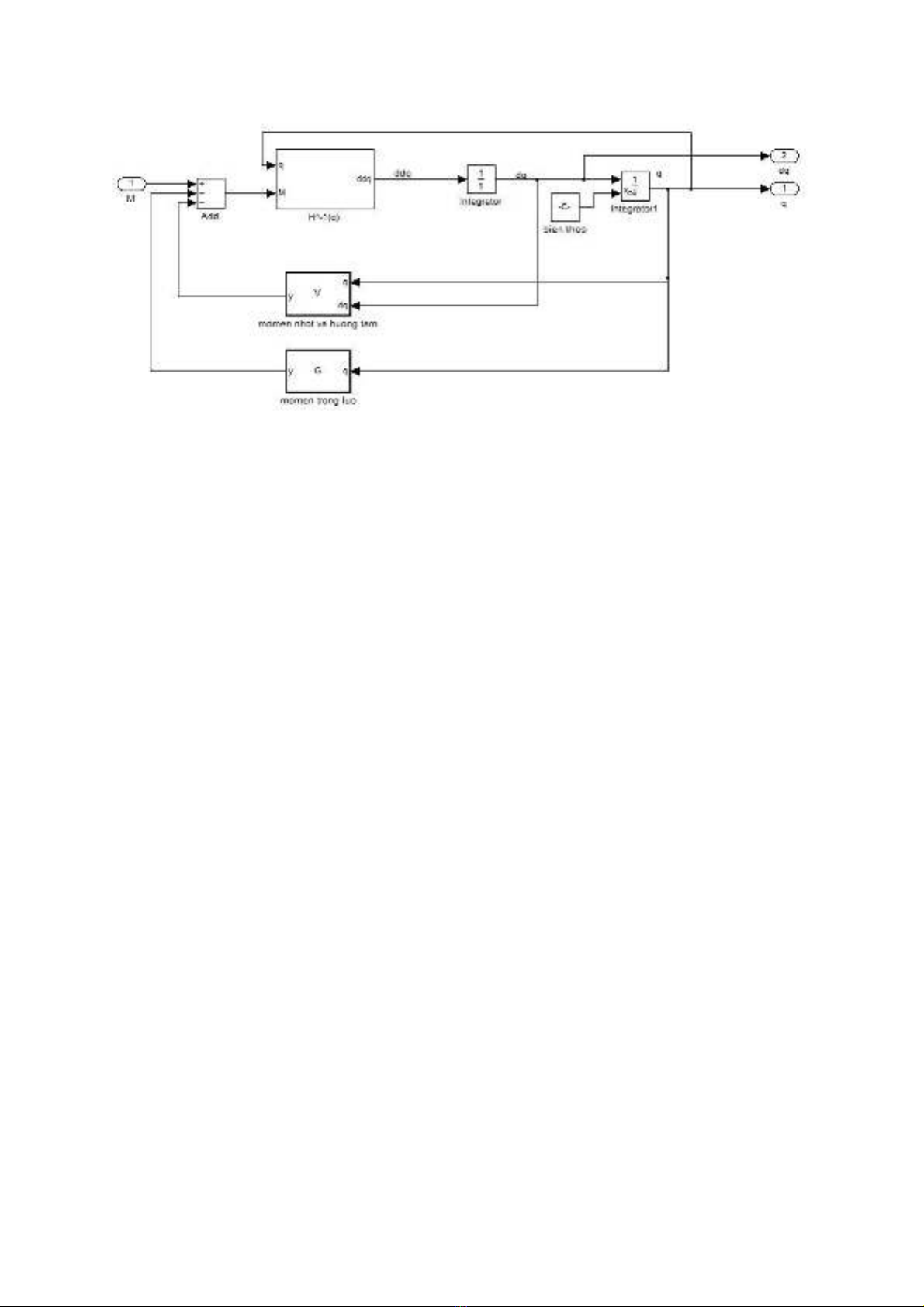
Trong đó:
- Hàm tính G:
function y = G(q)
% thong so ro bot
m1 = 1; m2 = 1;
l1 = 0.5; l2 = 0.4;
g = 9.8;
J1 = 0.5; J2 = 0.5;
lg1= l1/2; lg2 = l2/2;
% ma tran G
g1 = m1*g*lg1*cos(q(1))+m2*g*[l1*cos(q(1))+lg2*cos(q(1)+q(2))];
g2 = m2*g*lg2*cos(q(1)+q(2));
y = [g1;g2];
- Hàm tính V:
function y = V(q,dq)
% thong so robot
m1 = 1; m2 = 1;
l1 = 0.5; l2 = 0.4;
g = 9.8;
J1 = 0.5; J2 = 0.5;
lg1= l1/2; lg2 = l2/2;
% ma tran V
V1 = -m2*l1*lg2*sin(q(2))*[dq(2)^2+2*dq(1)*dq(2)];
V2 = m2*l1*lg2*sin(q(2))*dq(1)^2;
y = [V1;V2];
- Kh i ố
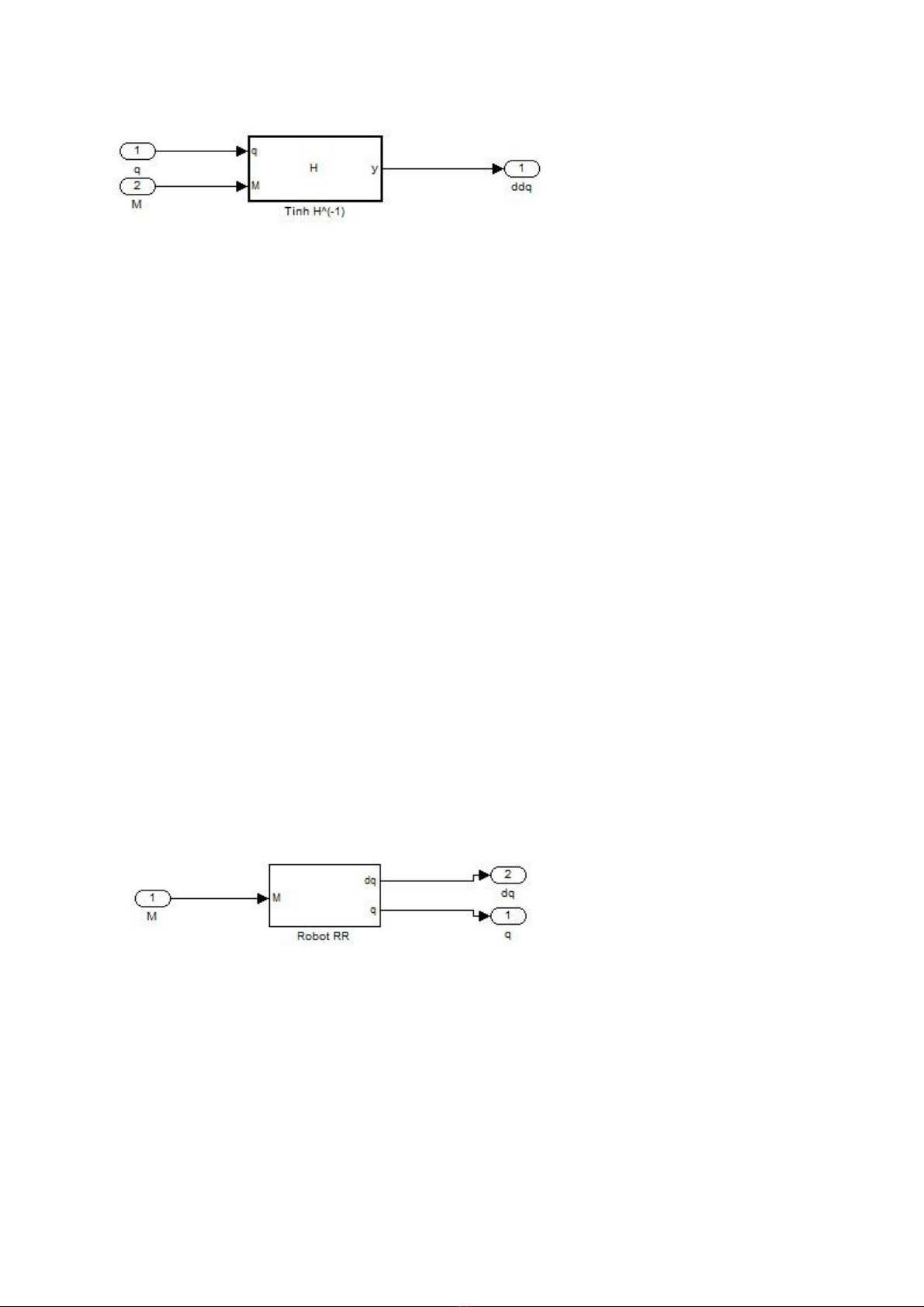
Hàm tính
function y = H(q,M)
% thong so robot
m1 = 1; m2 = 1;
l1 = 0.5; l2 = 0.4;
g = 9.8;
J1 = 0.5; J2 = 0.5;
lg1 = l1/2; lg2 = l2/2;
% bien khop
theta1=q(1);
theta2=q(2);
% ma tran H(q)
H11=m1*lg1^2+J1+m2*(l1^2+lg2^2+2*l1*lg2*cos(theta2))+J2;
H12=m2*(lg2^2+l1*lg2*cos(theta2))+J2;
H21=H12;
H22=m2*lg2^2+J2;
H = [H11 H12;H21 H22];
% ma tran nghich dao H^(-1)(q)
Hinv = inv(H);
% Gia toc khop
y = Hinv * M;
T o kh i robot (Create Subsystem)ạ ố


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)