
Đ c ng ôn t p lý thuy t đi u khi n t đ ngề ươ ậ ế ề ể ự ộ
I. Lý thuy tế
Câu 1: Th nào là h th ng đi u khi n? C u trúc h th ng đi u khi n?ế ệ ố ề ể ấ ệ ố ề ể
L y các ví d v các h th ng đi u khi n ( Phân tích các thành ph nấ ụ ề ệ ố ề ể ầ
h th ng, đ u vào đ u ra, ph n h i mà không quan tâm đ n hàm truy n).ệ ố ầ ầ ả ồ ế ề
Câu 2: Mô hình toán h c là gì ? Các ph ng pháp mô hình toán h c họ ươ ọ ệ
th ng đi u khi n?ố ề ể
Câu 3: Hãy trình bày v phép bi n đ i laplace? Các tính ch t c a phépề ế ổ ấ ủ
bi n đ i laplace. T i sao th ng dùng phép bi n đ i laplace thay ph ngế ổ ạ ườ ế ổ ươ
trình vi phân trong tính toán?
Câu 4: T i sao h th ng n đ nh khi các nghi m n m bên trái c a m tạ ệ ố ổ ị ệ ằ ủ ặ
ph ng ph c. Tín hi u ra c a h th ng dao đ ng khi nào?ẳ ứ ệ ủ ệ ố ộ
Câu 5: Phân tích s khác nhau gi a tiêu chu n n đ nh t n s và tiêuự ữ ẩ ổ ị ầ ố
chu n n đ nh đ i s ? ẩ ổ ị ạ ố
Câu 6: Trình bày ph ng pháp v bi u đ bode và bi u đ Nyquist c aươ ẽ ể ồ ể ồ ủ
h th ng? Hãy nêu tiêu chu n n đ nh bode và tiêu chu n n đ nhệ ố ẩ ổ ị ẩ ổ ị
Nyquist?
Câu 7: Các ch tiêu đánh giá ch t l ng c a khâu quán tính b c nh t?ỉ ấ ượ ủ ậ ấ
Câu 8: Nêu các tiêu chu n t i u hóa đáp ng quá đ , trong các tiêuẩ ố ư ứ ộ
chu n trên thì tiêu chu n nào đ c s d ng nhi u nh t? vì sao.ẩ ẩ ượ ử ụ ề ấ
Câu 9: Hãy phân tích tác d ng c a b đi u khi n? Nêu nh h ng c aụ ủ ộ ề ể ả ưở ủ
khâu hi u ch nh s m pha, tr pha, s m tr pha t i h th ng đi u khi n?ệ ỉ ớ ễ ớ ễ ớ ệ ố ề ể
Câu 10: Hãy phân tích các tác đ ng c a các khâu P,PI, PD, PID t i hộ ủ ớ ệ
th ng đi u khi n?ố ề ể

II. Bài t p: ậ
Câu 1: Th c hi n các phép bi n đ i Laplace ng c đ i v i các h th ngự ệ ế ổ ượ ố ớ ệ ố
có hàm truy n nh sau:ề ư
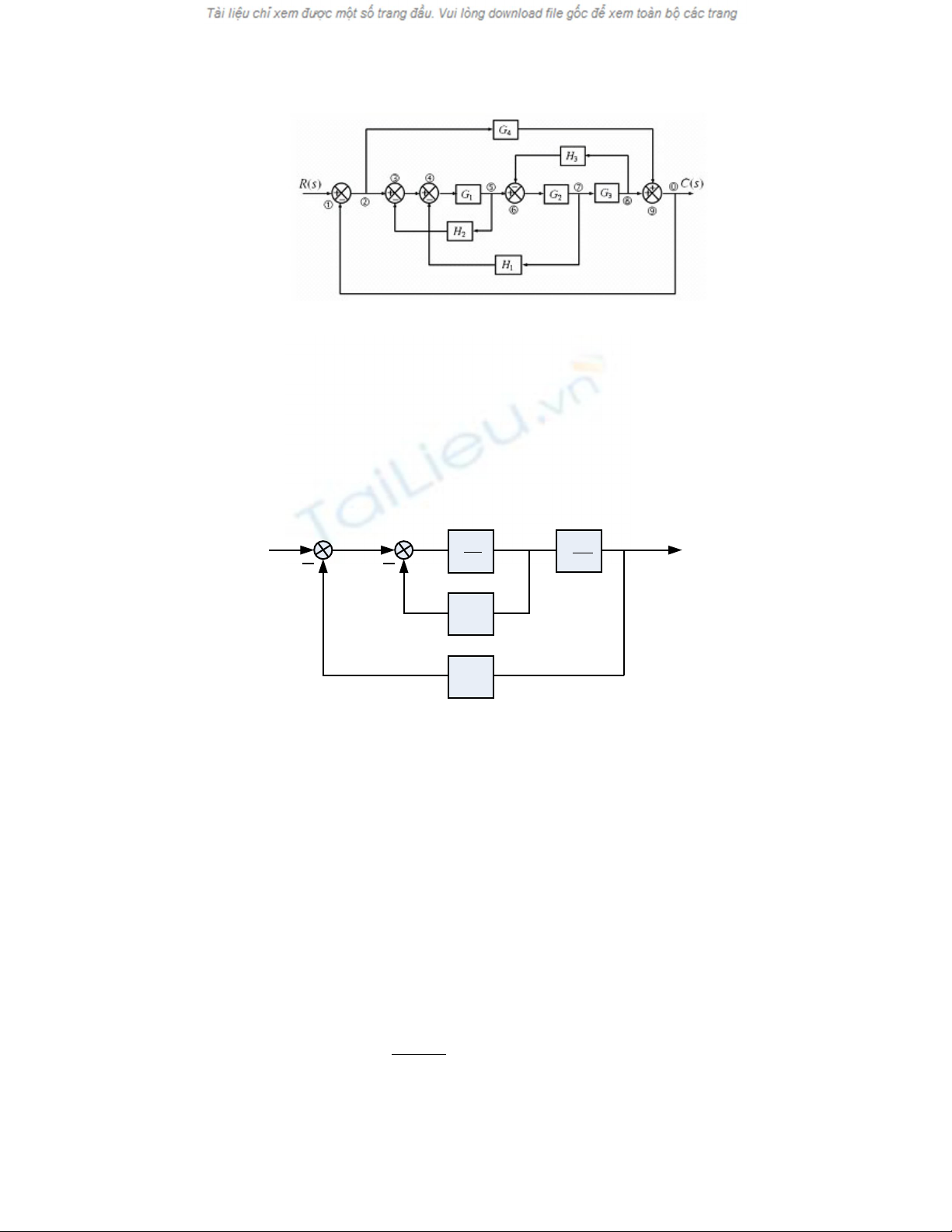
Câu 2: S d ng ph ng pháp bi n đ i s đ kh i và s đ dòng tín hi uử ụ ươ ế ổ ơ ồ ố ơ ồ ệ
(áp d ng công th c Mason) tìm hàm truy n c a các h th ng sau:ụ ứ ề ủ ệ ố
a.
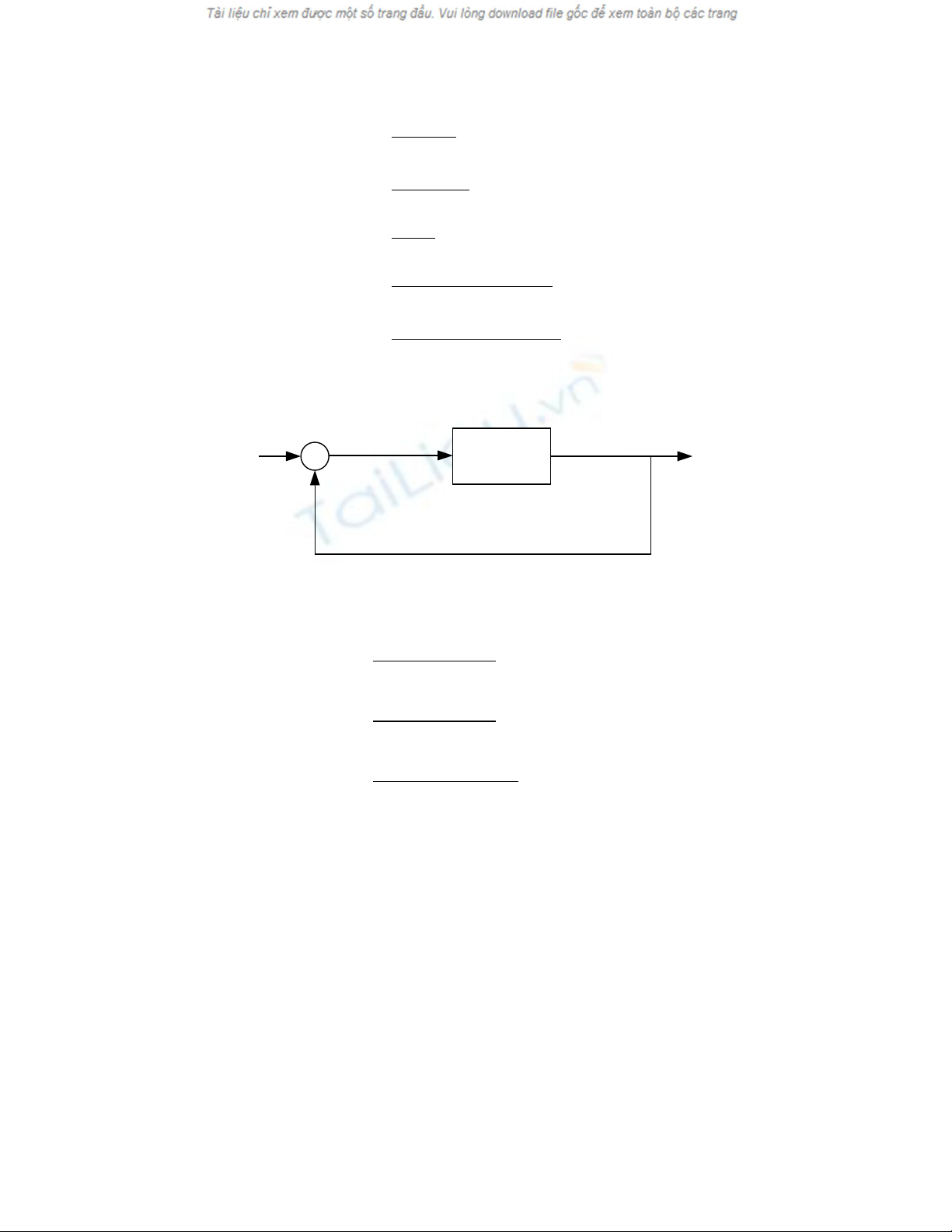
b.
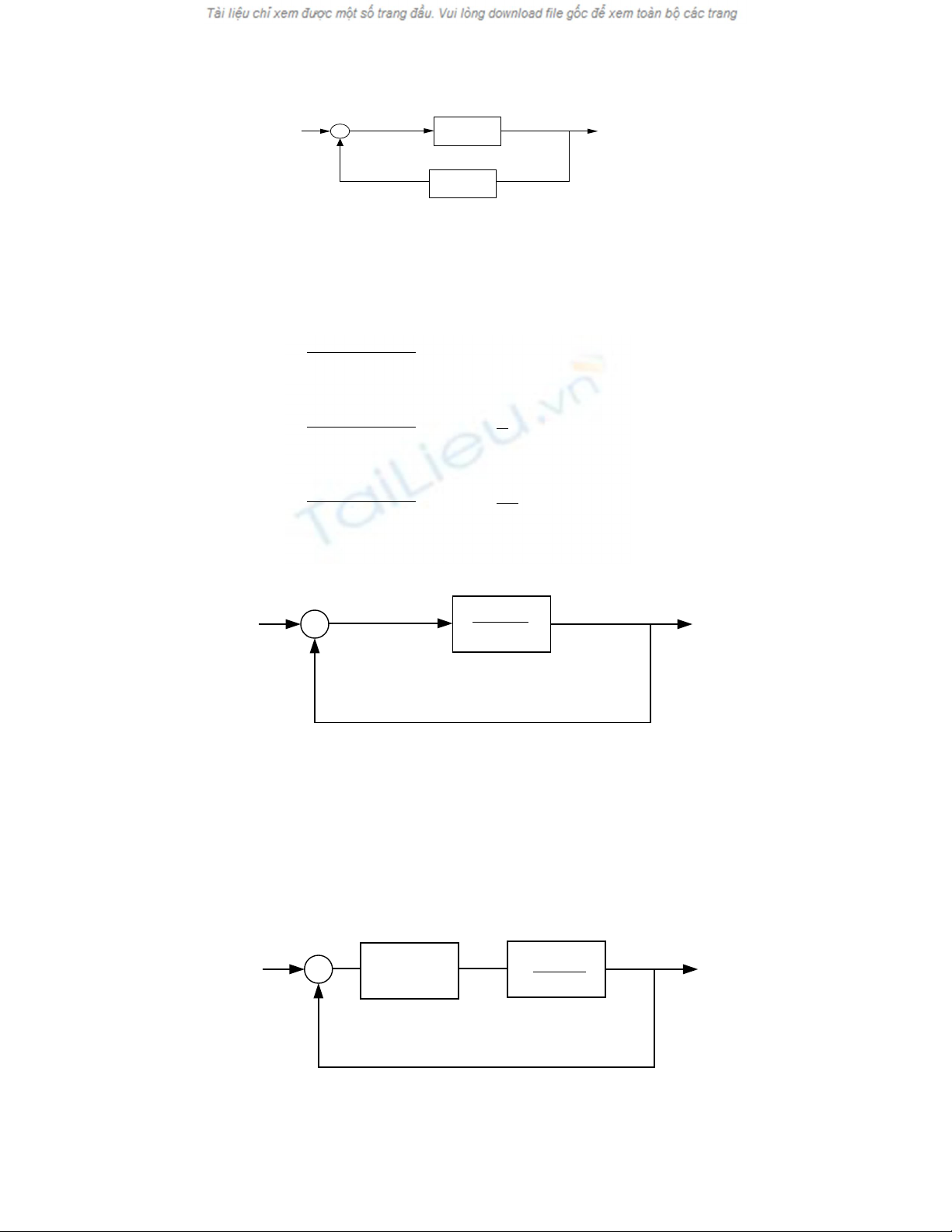
c.
d.
Y
1H
2H
3H4H5H
6H
+
+
+
+
+
−
+
−
X
+
+
X
Y
1H
2H
−
−
Câu 3: S d ng tiêu chu n Routh – Hurwitz đ xét s n đ nh c a hử ụ ẩ ể ự ổ ị ủ ệ
th ng có ph ng trình đ c tính sau: ố ươ ặ
a.
03482
234
=++++
ssss
b.
0243
2345
=+++++
sssss
Câu 4: Cho h th ng có K1=1; K2=4; K3=2; K4=6ệ ố
R(s)
K3
s
K1
s
K2
K4
E(s) Y(s)
U(s)
Hình 5: S đ kh i h th ngơ ồ ố ệ ố
a. Tìm hàm truy n m ch kín: Y(s)/U(s)ề ạ
b. Xác đ nh tín hi u đ u ra khi tín hi u đ u vào U(s) là m t hàm xungị ệ ầ ệ ầ ộ
đ n vơ ị
c. S d ng tiêu chu n Routh – Hurwitz kh o sát tính n đ nh h th ng ử ụ ẩ ả ổ ị ệ ố
Câu 5: V bi u đ bode và kh o sát n đ nh h th ng theo tiêu chu nẽ ể ồ ả ổ ị ệ ố ẩ
bode các tr ng h p sau: ườ ợ
1. G(s) =
)1(
1
+ss
2. G(s) =
)1(
1
2+ss
3. G(s) =
10
1
2++
+
ss
s
4. G(s) =
10
1
+
+
s
s
5. G(s) =
)1)(10010(
1
2+++ sss
6. G(s) =
)10010)(1(
)11.0(1000
2+++
+
ssss
s
Câu 6: Cho s đ kh i c a h th ng kín sau: ơ ồ ố ủ ệ ố
)(sG
h
X y
-
Hãy xác s n đ nh c a h th ng b ng tiêu chu n Nyquist c a hự ổ ị ủ ệ ố ằ ẩ ủ ệ
th ng kín ? ố
-
)13)(12(
1
)(
++
=
ss
sG
h
-
)12)(1(
1
)(
+−
=
sss
sG
h
-
1253
1
)(
24
+++
=
sss
sG
h
Câu 7: Xác đ nh sai s xác l p c a h th ng v i các tính hi u vào r(t)=ị ố ậ ủ ệ ố ớ ệ
dir c(t); r(t)=1(t); r(t)=tắ
)(sG
R(s) C(s)
-
)(sH
E(s)
Trong đó :
-G(s)=
)5)(1(
2
++
+
ss
s
; H(s)= s+3;
-G(s)=
)5)(1(
2
++
+
ss
s
; H(s)=
s
1
-G(s)=
)5)(1(
2
++
+
ss
s
; H(s)=
2
1
s
Câu 8: Cho h th ng có d ng nh hình v :ệ ố ạ ư ẽ
R(s) C(s)
-
)2(
4
+ss
a) Hãy xác đ nh h s t t d n ζ, t n s dao đ ng riêng wị ệ ố ắ ầ ầ ố ộ n ?
b) Đánh giá ch t l ng h th ng ( Sai l ch tĩnh, đ v t l , th i gianấ ượ ệ ố ệ ộ ọ ố ờ
xác l p (2%), th i gian tăng t c)?ậ ờ ố
Câu 9: Thi t k khâu hi u ch nh s m pha d ng ph ng pháp QĐNSế ế ệ ỉ ớ ụ ươ
th a mãn đi u ki n POT < 10%, tỏ ề ệ qd < 0,5s (tiêu chu n 2%)?ẩ
R(s) C(s)
-
)1(
4
+ss
Gc(s)


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)