TRƯỜNG ĐẠI HỌC s ư PHẠM KỸ THUẬT
THÀNH PHỔ HỒ CHÍ MINH
KHOA Cơ KHÍ CHẾ TẠO MÁY
Bộ MÔN Cơ ĐIỆN TỬ
ĐÈ THI CUỐI KỲ HỌC KỲ n NĂM HỌC 21-22
Môn: ĐIÈU KHBỀN T ự ĐỘNG
Mã môn học: AUCO230329
Đề Sổ/Mã đề: 02 Đề thỉ có 02 trang.
Thời gian: 75 phút.
Được phép sử dụng tài liệu.
const
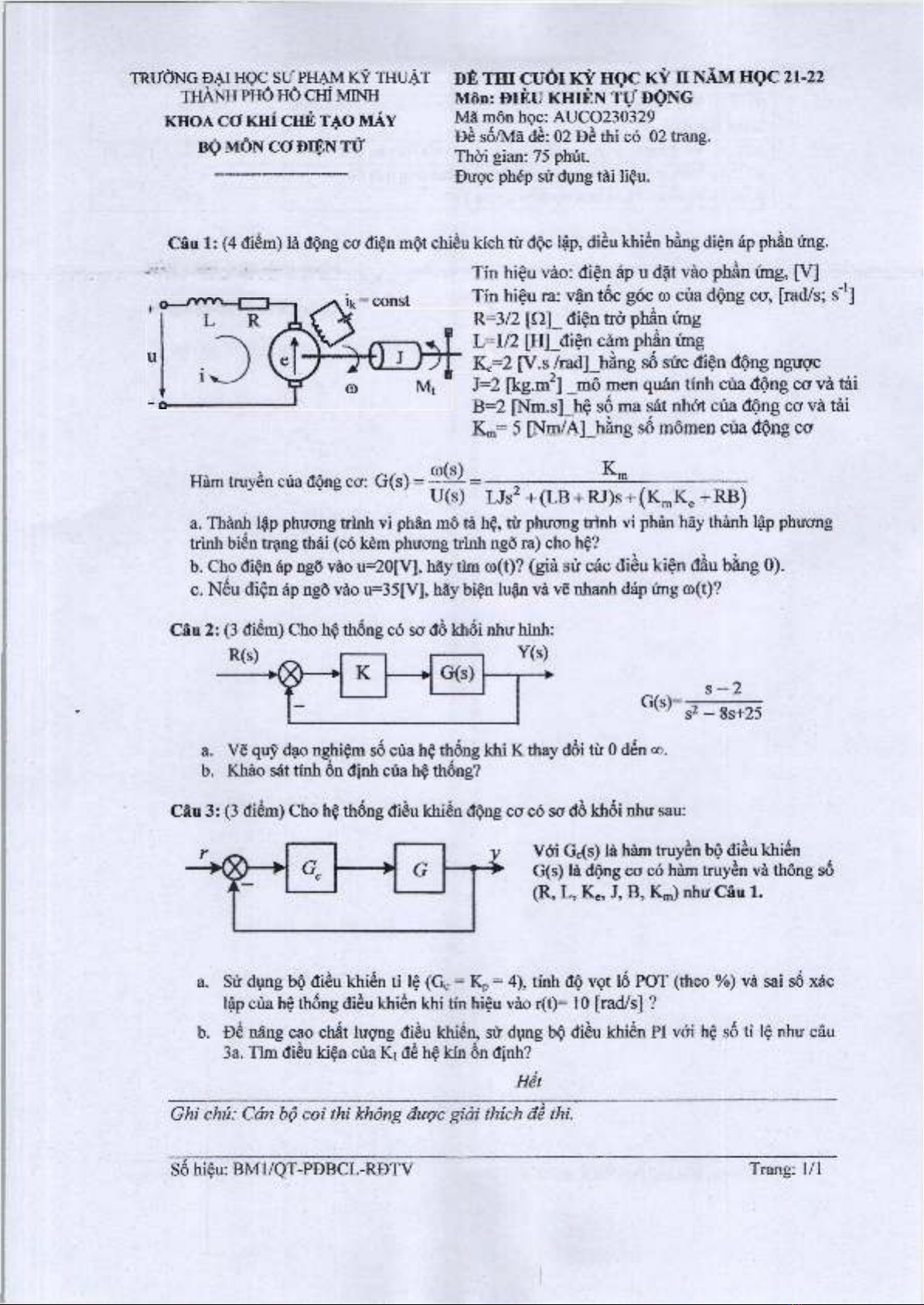
Câu 1:(4 điểm) là động cơ điện một chiều kích tìr độc lập, điều khiển bằng điện áp phần ứng.
Tín hiệu vào: điện áp u đặt vào phần ứng, [V]
Tín hiệu ra: vận tốc góc 03 của động cơ, [rad/s; s"1]
=3/2 [Q]_ điện ừở phần ứng
=1/2 [H]_điện cảm phần ứng
=2 [V.s /rad]_hằng số sức điện động ngược
J=2 [kg.m2] _mô men quán tủih của động cơ và tải
B=2 pvím.s]_hệ số ma sát nhớt của động cơ và tải
Km= 5 |>Ịjn/A]_hằng số mômẹn của động cơ
Hàm truyền của động cơ: G (s): (0(s) K.
U(s) LJs2 + (LB + RJ)s + (K mK e + RB)
a. Thành lập phương frinh vi phân mô tả hệ, từ phưcmg ừình vi phân hãy thành lập phương
ừình biến trạng thái (có kèm phương frinh ngõ ra) cho hệ?
b. Cho điện áp ngõ vào U=20[V], hãy tìm <a(t)? (giả sử các điều kiện đầu bằng 0).
c. Nếu điện áp ngõ vào U=35[V], hãy biện luận và vẽ nhanh đáp ứng c〇(t)?
Câu 2: (3 điểm) Cho hệ thống có sơ đồ khối như hình:
R(s) KG(s)
Y(s)
G(s)= s 一 2
s2 - 8s+25
a. Vẽ quỹ đạo n^iiệm số của hệ thống khi K thay aoi từ 0 đến QO.
b. Khảo sát tính ổn định của hệ thống?
Câu 3: (3 aiem) Cho hệ thống aiêu khiển động ca có sơ đồ khoi như sau:
G
ハ
G
Với Gc(s) là hàm truyền bộ aieu khien
G(s) là động cơ có hàm truyền và thông so
(R, L, Ke? J, B, Km) như Câu 1.
a. Sử dụng bộ điều khiển tỉ lệ (Gc = Kp = 4), tửửí độ vọt lố POT (theo %) và sai số xác
lập của hệ tìiống điều khiển khi tín hiệu vào r(t)=10 [rad/s] ?
b. Để nâng cao chất lượng điều khiển, sử dụng bộ điều khiển PI với hệ so tỉ lệ như câu
3a. Tim điều kiện của K[ để hệ km ổn định?
Hết
Ghi chú: Cán bộ coi thi không được giải thích đé thi.
Số hiệu: BM1/QT-PĐBCL-RĐTV Trang:1/1
Chuẩn đầu ra của học phần (về kỉến thức) Nội dung kiểm tra
[G 2.1]:Xây dựng được các dạng mô hình toán của hệ tíìống điều
khiển liên tụe
Cau 1
[G 2.3]: Vẽ được quỹ đạo nghiệm số và khảo sát tủih ồn định. Câu 2, Câu 3b
[G 2.4]: Tính toán các thông số chất lượng, đáp ứng quá độ. Câu 3
[G 4.1]:Thiết kế/Phân tích bộ điều khiển PID. Câu 3
Ngày 3 tháng 6 năm 2022
Thông qua Trưởng ngành
(ký và ghi rõ họ tên)
Số hiệu: BM1/QT-PĐBCL-RĐTV Trang:1/1
![Đề thi Điều khiển tự động cuối kỳ 1 (2020-2021) có đáp án [FULL]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260209/diegomaradona04/135x160/85251771081312.jpg)




![Đề thi Điều khiển tự động học kì 1 năm 2024-2025 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250401/lakim0906/135x160/6291743476385.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)