Giáo trình điều khiển số 99
4.4.3. Thiết kế bù sớm pha
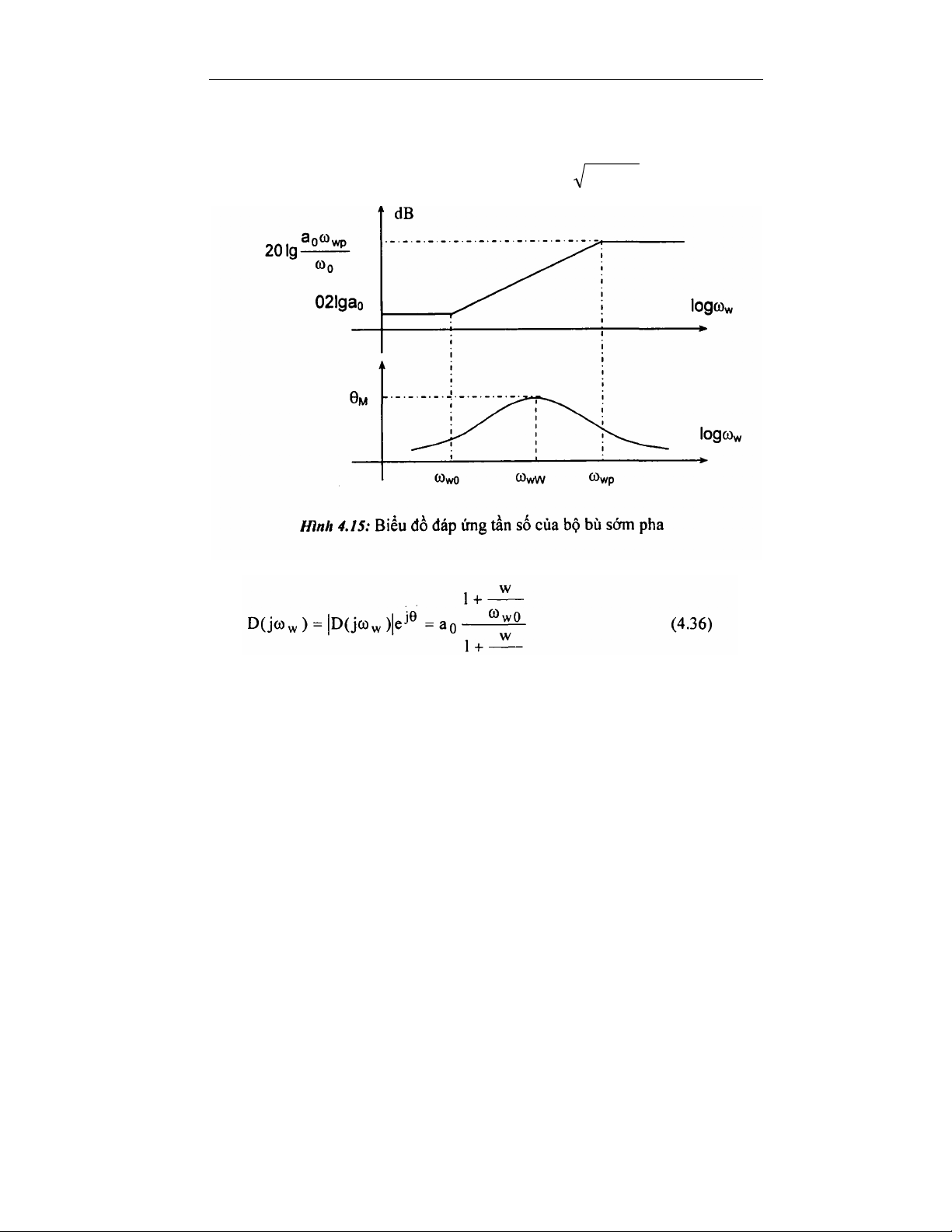
Trong bộ bù sớm pha, ωw0 < ωws, đáp tuyến tần số như hình vẽ:
Độ dịch pha cực đại xảy ra tại tần số wswwM
ωωω
0
= (4.35)
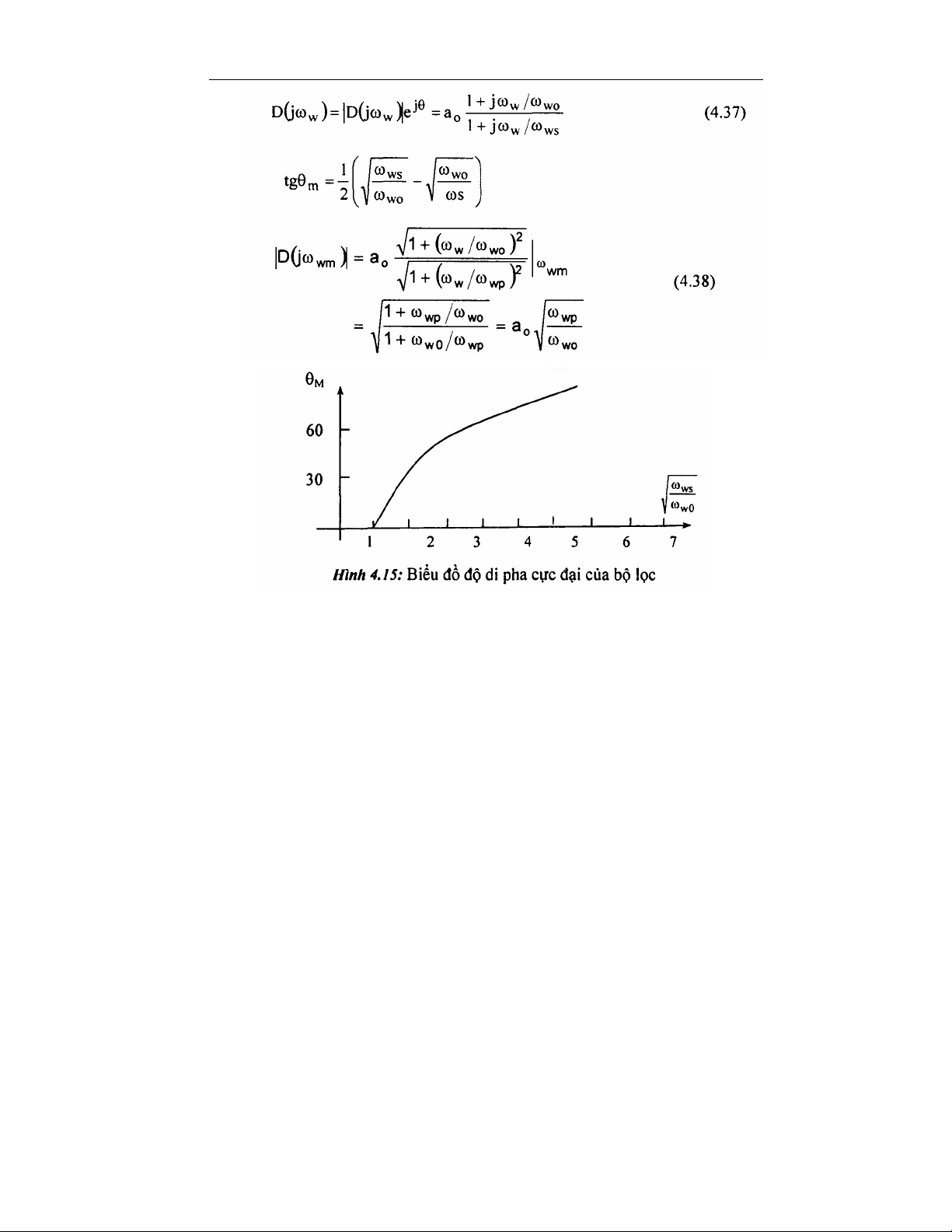
Đồ thị θm theo tỷ số ωw0/ωws
Hàm truyền đạt hiệu chỉnh có dạng:
Giáo trình điều khiển số 100
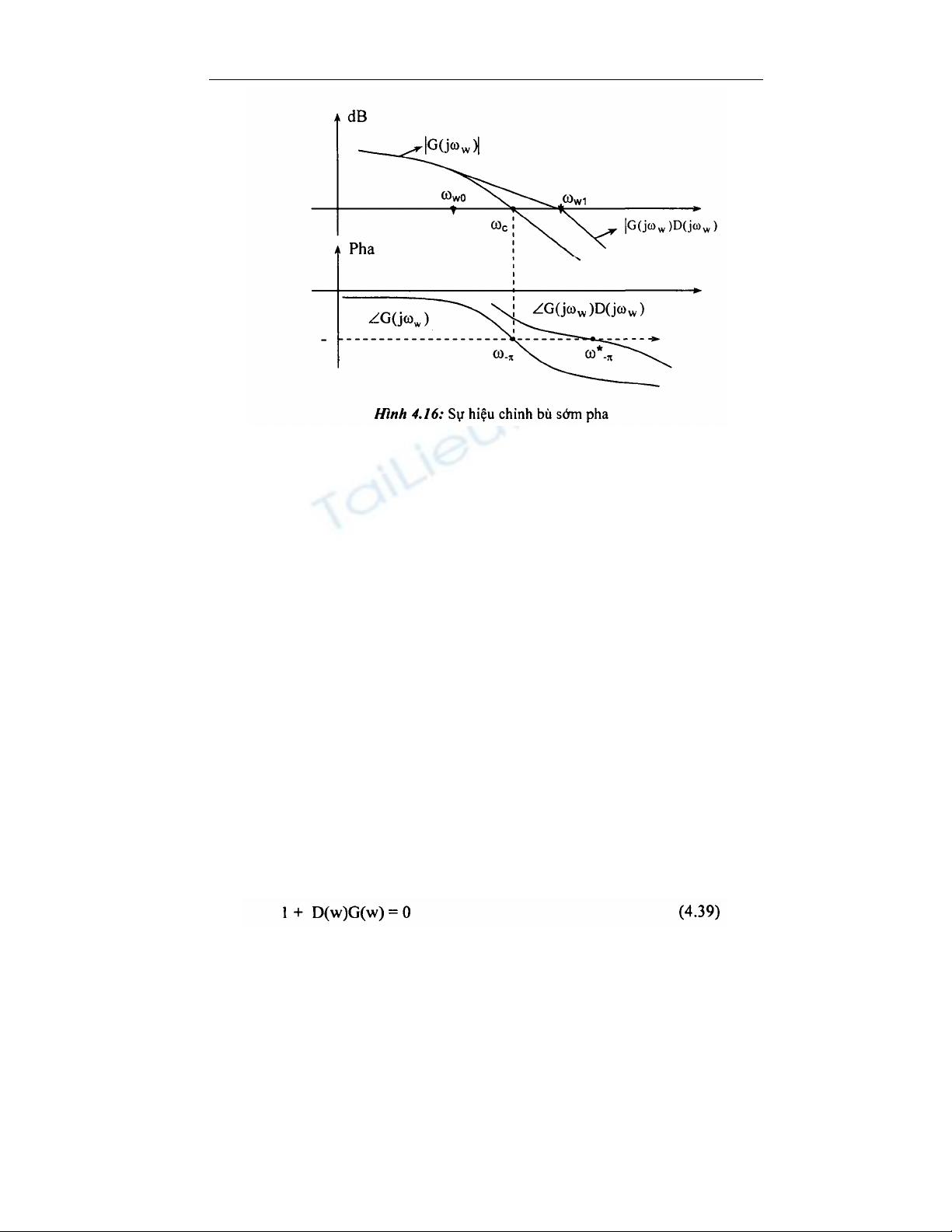
Từ hình vẽ ta thấy, nếu hiệu chỉnh sớm pha tạo ra sự sớm pha và tăng
độ dự trữ ổn định của hệ, nhưng cũng làm tăng độ khuếch đại tần số cao
so với tần số thấp gây ảnh hưởng bất ổn định.
Hình dưới là số hiệu chỉnh bù sớm pha. Sự sớm pha được đưa ra lân
cận tần số ω của hệ thống đê tăng độ dự trữ ổn định của hệ. Chú ý rằng
dải thông của hệ cũng tăng lên, kết quả đáp ứng thời gian nhanh hơn.
Giáo trình điều khiển số 101
Thiết kế sớm pha tạo ra hệ thống có độ sớm pha cần thiết nhưng
không kiểm soát được biên độ.
Thiết kế sớm pha là quá trình chọn và thử, vì sớm pha tạo sự ổn định
ở miền tần số còn độ khuếch đại tạo sự bất ổn định.
*Trình tự thiết kế sớm pha
- Theo phương pháp này, biên độ và pha của hàm truyền sẽ có giá trị
xác định tại tần số cho trước.
Ta chọn k = 1 (logk = 0 dB) và pha = (1800 + m
φ
)
trong đó: m
φ
là độ dự trữ pha mong muốn.
- Trong quá trình thiết kế, ta không xác định độ dự trữ biên độ nên
có thể làm cho hệ thống không ổn định. Vì vậy, bước cuối cùng là kiểm
tra độ dự trữ biên độ để hệ thống ổn định và thỏa mãn yêu cầu thiết kế.
- Phương trình đặc tính của hệ thống sau khi chuyên sang mặt phẳng
w
Giáo trình điều khiển số 102
Ta cần phải xác định D(w) sao cho tại ωw1
Đồng thời hệ thống có độ dự trữ biên độ thỏa mãn yêu cầu.
Ta biểu diễn D(w) dưới dạng
(ở phần trước ta đã có:
1
0
0a
a
=
ω
, 1
1
b
s=
ω
, a0 là độ khuếch đại 1 một
chiều của bộ bù)
Từ (4.39) ta thấy D(jωw1) Phải thỏa mãn điều kiện
Phương trình (4.40) có 3 số hạng chưa biết là α, a1, b1
Từ (4.41 ) và (4.42) ta rút ra:
⇒ Chú ý
Trường hợp hàm H(s) ≠ 1 thì ta thay G(jωw1) trong các biểu thức
(4.42), (4.43), (4.44), (4.45) bằng HG(jωw1).

Giáo trình điều khiển số 103
+ Các bước thiết kế
- Chọn độ dự trữ pha ở tần số ωw1
- Xác định a1, b1 của bộ bù.
- Dựa vào đặc tính xác lập của hệ để xác định độ khuếch đại 1 chiều
a0
Tần số ωw1 được xác định theo cách sau: (3 ràng buộc)
+ Vì là bộ bù sớm pha nên θ phải dương từ (4.44) ⇒ θ > 0
+ b1 phải dương để đảm bảo chắc chắn hệ ổn định do đó theo (4.46)
ta có:
* Ví dụ 4.6: Xét lại ví dụ điều khiển động cơ secvo có sơ đồ cấu trúc
như hình vẽ, giả thiết hàm truyền của thiết bị điều khiển là:
với độ dự trữ pha : 550 và hệ số khuếch đại một chiều của bộ bù sớm pha
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)