Điều khiển vận tốc động cơ DC dùng bộ điều khiển PID.
3
CơsởLýthuyết
1. ThuậtđiềukhiểnPIDvàviệcrờirạchóanó:
Trongmiềnthờigian,bộđiềukhiểnPIDđượcmôtảbằngmôhìnhvào
ra:
=+ +
∫
0
()
() () ()
t
Pi d
de t
Ut Ket K etdt K dt
trongđóe(t)làtínhiệungõvào,u(t)làtínhiệungõracủabộđiều
khiển.
Tuynhiên,đốivớiViĐiềukhiểnnóichung,việctínhtoáncácthành
phầnP,I,D‐nóicáchkháclàtínhcáctíchphânhayđạohàmtrongcông
thứctrênlàkhôngthựchiệnđược.Lýdo:CPUkhôngthểtínhtoán
chínhxáctớimứcΔt=0,nghĩalàkhôngliêntục.
Dođó,tachỉcóthểtínhtoángầnđúngbằngcáchtachoΔt=εrất
nhỏnhưnglớnhơn0.
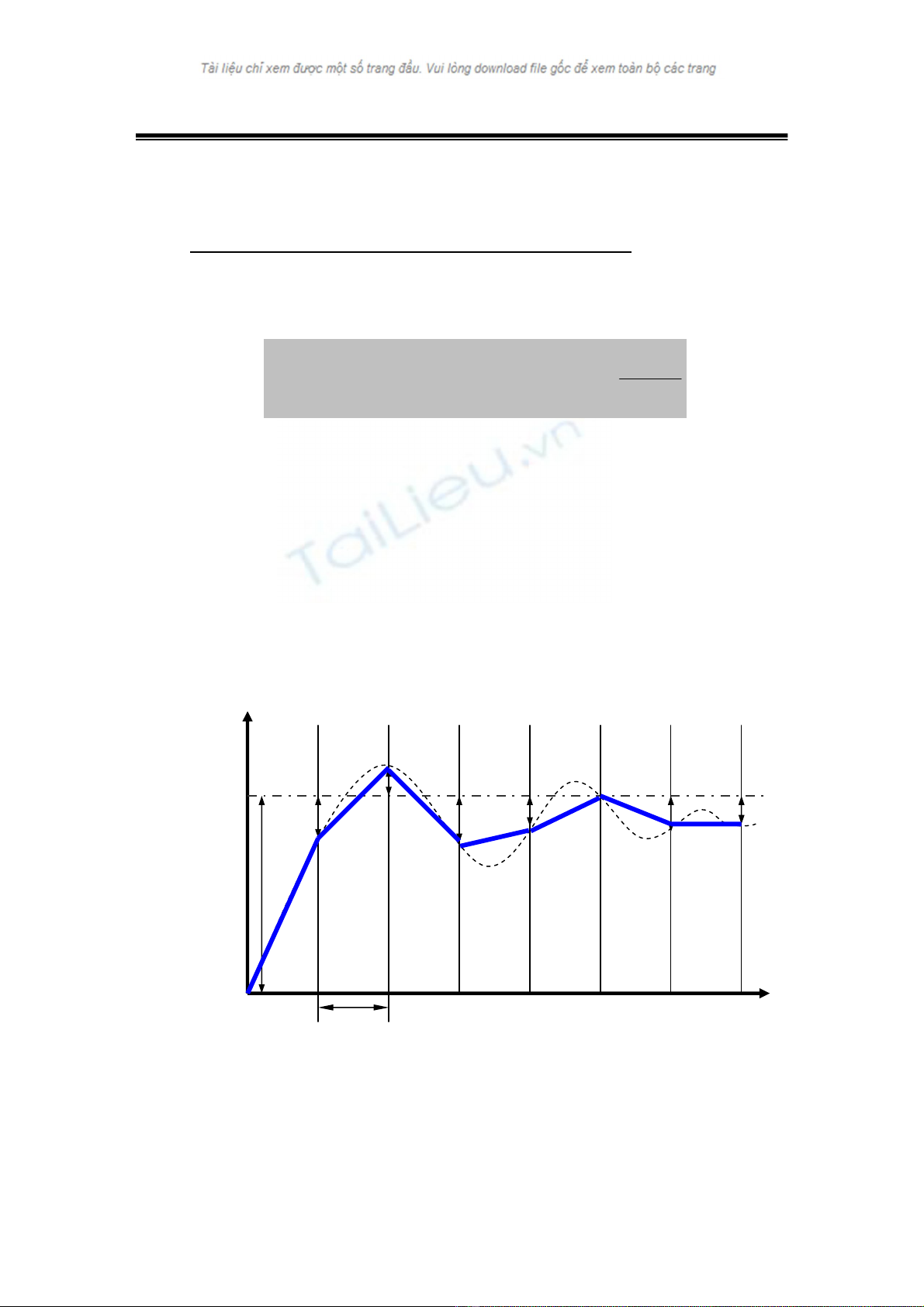
ĐểtìmhệthứcPIDrờirạc,taxétđồthịsauđây:
Chúthích:‐đườngchấmgạchbiểudiễnvậntốccầnthiếtv_set.
‐đườnggạchgạchbiểudiễnvậntốcthựctếcủađộngcơ.
Δt
0
e1
1
e2
e0
t (s)
V
2
Điều khiển vận tốc động cơ DC dùng bộ điều khiển PID.
4
‐đườnggạchđậmlàđồthịrờirạchóacủavậntốcđộng
cơ.
‐Δt làthờigianlấymẫu.
Thànhphầntíchphân:
e(t)dt=limΔt‐‐>0(Σe(t)Δt).DođókhilấygầnđúngΔt=ε>0,tacó:
e(t)dt≅Σe(i)Δt,i=0,1,2,3…
Thànhphầnviphân:
de(t)/dt=limΔt‐‐>0{[e(t2)‐e(t1)]/Δt}.DođókhilấygầnđúngΔt=ε>0,
tacó:
de(t)/dt=[e(i+1)‐e(i)]/Δt,i=0,1,2,3…
Tómlại,tacó:
u(i)=Kp*e+Kd*[e(i+1)‐e(i)]/Δt+Ki*Σe(i)Δt
Đặt e_delta(i+1)=e(i+1)‐e(i)
e_sum(i+1)=Σe(i)=e_sum(i)+e(i+1)
Trongcôngthứctrên,thờigiansamplingtimeΔtlàrấtnhỏ,tabỏ
quaΔt.Saunày,khitìmcáchệsốKd,Kibằngthựcnghiệm,KdvàKi
lúcđóđãbaogồmcảΔt.
Khiđó,côngthứctrênđượcviếtlạinhưsau:
u(i)=Kp*e+Ki*e_sum+Kd*delta_e
điềukiệnbiên:u(0)=duty>0.
2. Đốitượngđiềukhiển:
ĐốitượngđiềukhiểnlàvậntốcđộngcơDC(đc).Tabiếtvậntốc
độngcơDCphụthuộcdòngđiệnhayđiệnápmàtacấpchonó(dĩ
nhiênphảinằmtrongkhoảngchophépcủađc).Cụthểởđâysử
dụngđc24VDC,dođóđiệnápcấpkhôngđượcquá24V.Tuynhiên,
việccấpápchođctrongmộtkhoảngrộngtừ0đến24Vlàkhókhăn.
Điều khiển vận tốc động cơ DC dùng bộ điều khiển PID.
5
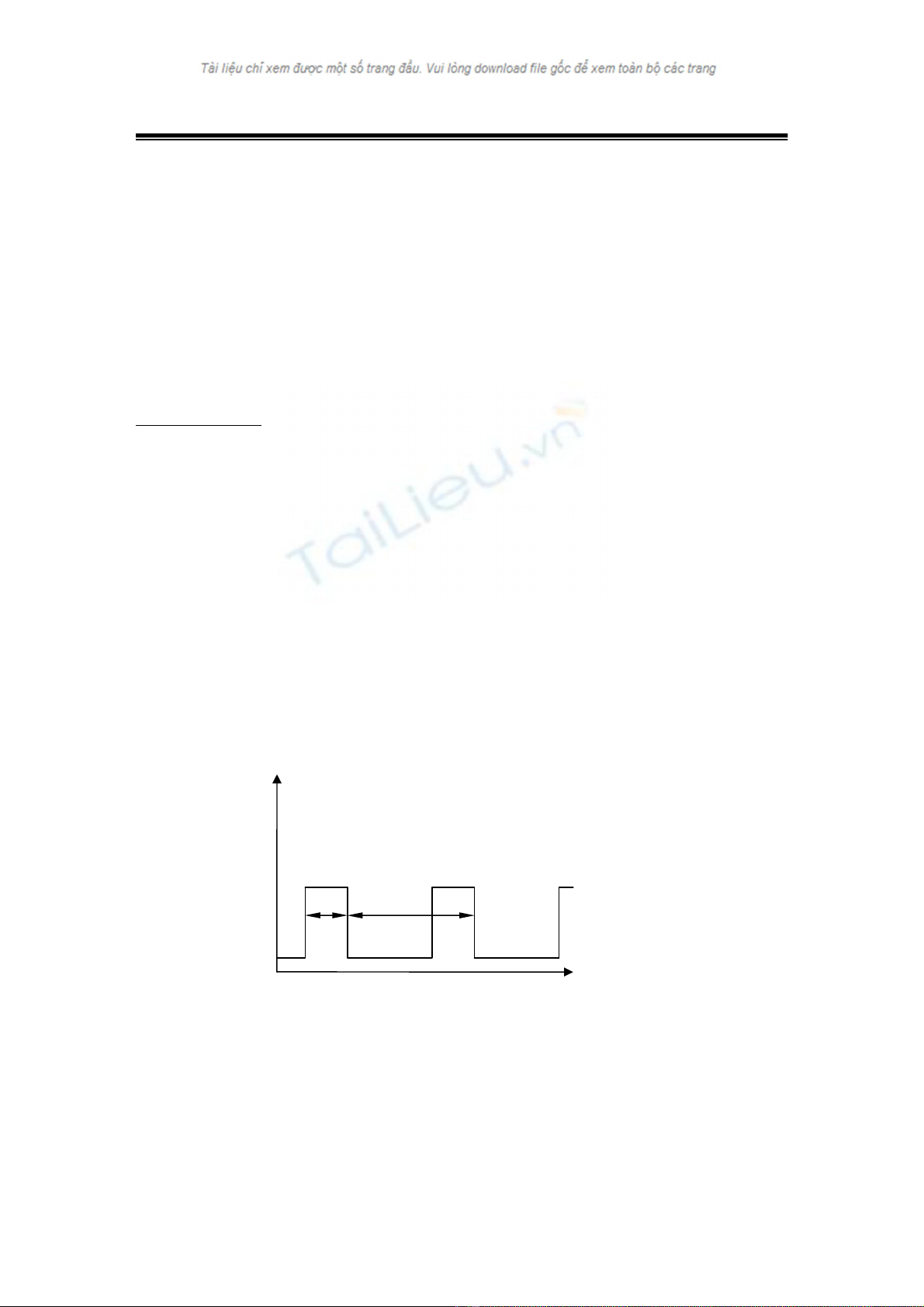
DođótađiềukhiểnvậntốctheoxungPWM(PulseWidth
Modulation),cụthểlàdutycycle.
VậycácngõvàovàracủabộđiềukhiểnPIDnhưsau:
Ngõvào:e=vậntốchiệntại(v_cur)‐vậntốcthiếtlập(v_set)
Ngõra:u=%dutycycle
Phụthuộcgiữa%dutyvàvậntốcđcgầnnhưtuyếntínhnên
đểđơngiản,tagiảsửnóhoàntoàntuyếntính.Vậy,tacóthểđiều
khiểnvậntốcđcthôngqua%duty.
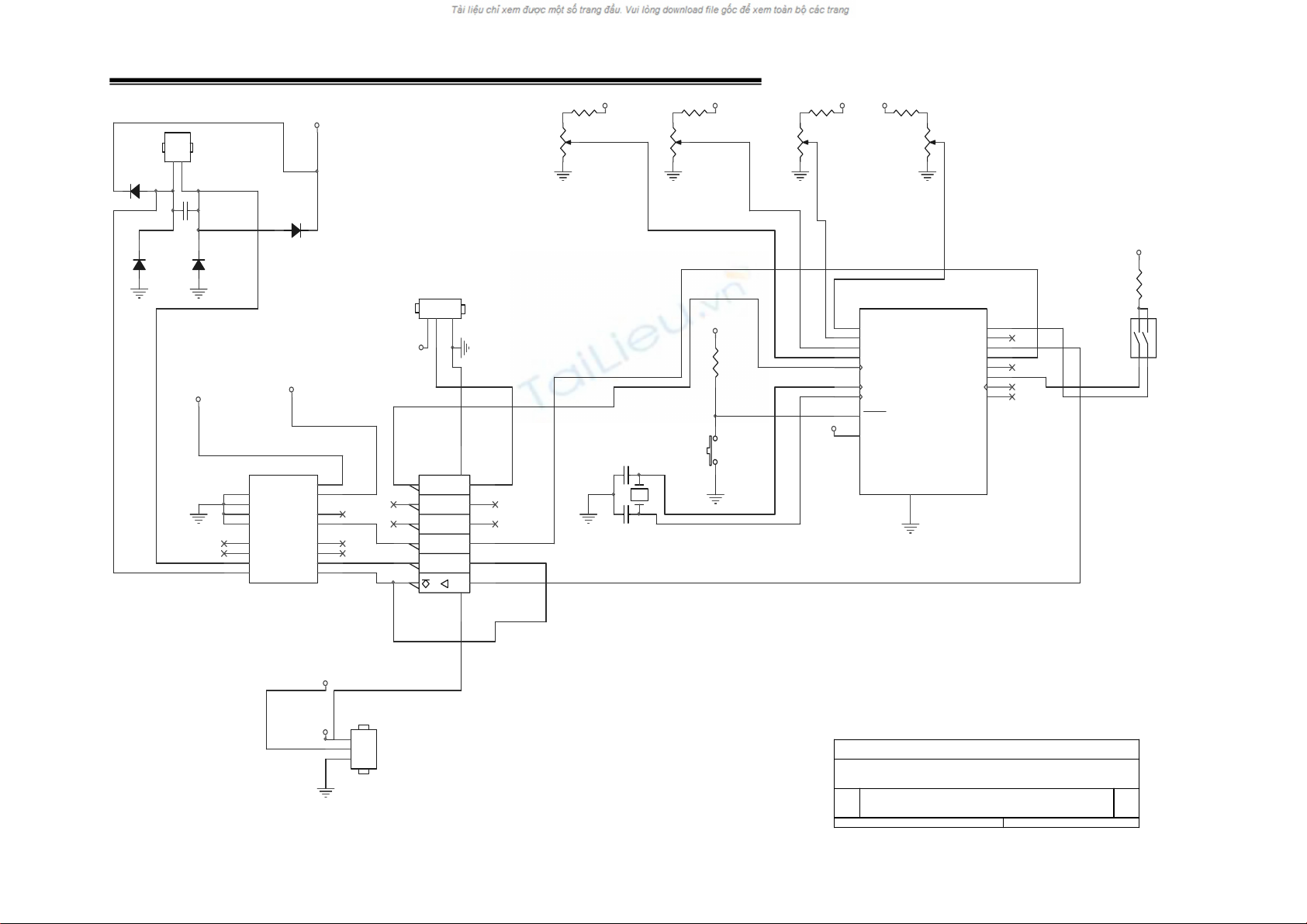
3.Sơđồmạch:Giớithiệucácthànhphầntrongmạchvàchứcnăng:
• ViđiềukhiểnchínhcủamạchđiềukhiểnlàPIC16F88của
Microchip.PIC16F88có7kênhADC10bit,1PWMđểđiều
khiểnđc.
Dođó,tasửdụng4kênhADCdùngđểnhậpdữliệu(hệsốPID
chỉnhbằngtayvàvậntốcmongmuốn).ChânADCnốivớimộtcầuphân
ápbằngbiếntrở.Giátrịbiếntrởlàmthayđổiđiệnápdạnganalogtrên
chânADC,vàPIClấyđiệnápđóchuyểnthànhgiátrịdigital.Việctính
toáncụthểxinxemphần5củabáocáonày.
PWM(PulseWidthModulation)làmộtmodulemởrộngcủaPIC
16F88.Nócóchứcnăngtạoramộtdãyxungcó%dutyvàtầnsốxácđịnh.
Cácgiátrị%dutyvàtầnsốcủaxunghoàntoàncóthểhiệuchỉnhbằng
phầnmềm.
ChânT0CLKIcủaPIC16F88làchânvàocủaxungclockbộđịnhthời
0.Chânnàyđượcnốivớidâytínhiệucủaencoder.Timer0lúcnàycóchức
năngcounterđếmsốxungpháttừencoder.Timer1sẽđịnhthờitrong1
khoảngthờigian.KhiTimer1tràn,talấygiátrịcủaTimer0.Dựavàogiátrị
duty Chu kỳ T
Tần số f = 1/T
Điều khiển vận tốc động cơ DC dùng bộ điều khiển PID.
6
này,cóthểtínhđượcvậntốcđcởthờiđiểmnày.Phầntínhtoánxemmục
5.
• DriverđiềukhiểnđclàchipL293củaTexasInstruments.Chip
nàycócácđặcđiểmsau:
Dòngtốiđa1A,quádòng1.2A.
Điệnáptốiđalà33V.
Cóthểláicùnglúc2đcDC.Tuynhiên,tachỉsửdụng1cầuHđể
điềukhiển1đc.TachọncầuH1cócácchânngõvàolàchânenable1/2EN,
chânchọnchiềuquay1A,2A.Cácchânralà1Y,2Y.Chân1/2ENđượcnối
vớichâncấpxungPWMcủaPIC16F88.
• Chip74LS06làcổngNOT.Mụcđíchđểkhuyếchđạixung
clockcủaencodertrướckhiđưavàoT0CLKI.
• Mạchsửdụng2nguồn:5Vchocácchiphoạtđộngvà24Vcho
độngcơ.
Docáchđấudâydướiđây,tacóchânRB2củaPIC16F88=0/1thì
đcquaythuận/nghịchchiềukimđồnghồ.
SauđâylàsơđồmạchđượcvẽbằngOrCAD9.2.ThứtựchânIC,
cáchnốidâycụthể,côngdụngcủacácchânđặcbiệtxinxemtrênsơđồ
mạchnày.
Điều khiển vận tốc động cơ DC dùng bộ điều khiển PID.
7
VCC
Tu 30 pico x 2
J3
Dong co
1
2
Bien tro
VCC
Quay phai
/Quay
trai
S1
SW DIP-2
1
24
3
U15
7406
14 7
1
3
5
9
11
13
2
4
6
8
10
12
U16
PIC16F88
5
14
15
4
16
17
18
1
2
3
6
7
8
9
10
11
12
13
Vss
VDD
OSC2/CLKOUT
MCLR/RA5/Vpp
OSC1/CLKIN
RA0/AN0
RA1/AN1
RA2/AN2
RA3/AN3
RA4/AN4/TOCKI
RB0/INT/CCP1
RB1/SDI/SDA
RB2
RB3/CCP1/PGM
RB4/SCK/SCL
RB5
RB6/AN5/T1CLKI
RB7/AN6
C4
R5
100
D3
VCC
Dieu
chinh
toc do
mong
muon
VCC
J1
Encoder
1
2
3
VCC_CIRCLE
J2
Nguon
1
2
3
Y1
PWM
R3
100
SW1
Reset VCC
version2 by
Wonbinbk@gmail.com
DC Motor controller sche.
B
11Wednesday , April 27, 2005
Title
Size Document Number Rev
Date: Sheet of
U2
L293
2
7
10
15
1
9
3
6
11
14
4
5
13
12
16
8
1A
2A
3A
4A
1/2EN
3/4EN
1Y
2Y
3Y
4Y
GND
GND
GND
GND
VCC1
VCC2
VCC_CIRCLE
1/4=Open/Close--->PID tu dong./bang
tay.
2/3=Open/Close--->quay trai/quay phai.
1=mass
2=fase A
3=5V
D2
C2
VCC
Encoder
feedback
R4
100
He so Kd
PHAN HANG DUY THAI 20202382
R6 100
R2
1K
VCC
D1
He so Ki
VCC
VCC_CIRCLE
1= 5V
2=24V
3= mass
4MHz
He so Kp
VCC
VCC
C1
R1
R
D4























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)