
Tuyển tập Hội nghị Khoa học thường niên năm 2024. ISBN: 978-604-82-8175-5
342
MÔ HÌNH BỘ ĐIỀU KHIỂN DỰ BÁO SỬ DỤNG MẠNG NƠ-RON
ỨNG DỤNG CHO CÁNH TAY MÁY MỘT BẬC TỰ DO
Tạ Thị Chinh
Trường Đại học Thủy lợi, email: Chinhtt@tlu.edu.vn
1. GIỚI THIỆU CHUNG
Một trong những lĩnh vực nghiên cứu sôi
động nhất trong ngành robot học là điều
khiển cánh tay robot, do nhu cầu cao từ lĩnh
vực công nghiệp để tăng sản xuất cũng như
làm giảm công việc khó khăn và lặp lại đối
với người vận hành. Cấu trúc cơ học của loại
robot này rất phức tạp, điều này làm nhiệm
vụ điều khiển trở nên khó khăn hơn nhiều.
Trong nghiên cứu này, đã phát triển một
mô hình điều khiển MPC (Model Predictive
Control- điều khiển dự báo) dựa trên mạng
Noron cho cánh một bậc tự do. Ý tưởng này
bao gồm việc tuyến tính hóa mô hình động
học phi tuyến của robot bằng tuyến tính hóa
hồi tiếp, sau đó dựa trên mô hình tuyến tính
thu được tín hiệu đầu ra mẫu để huấn luyện
mạng noron, phương pháp LM (Levenberg
Marquardt) được sử dụng để huấn luyện
mạng. Sau khi huấn luyện mạng nơ-ron của
đối tượng NNp (Neural-network plant), mạng
này sẽ có cấu trúc và tham số xác định mạng
này sẽ có cấu trúc và tham số xác định. Bước
tiếp theo là dùng phương pháp điều khiển dự
báo MPC để thiết kế bộ điều khiển dự báo.
2. MÔ HÌNH TOÁN CỦA CÁNH TAY
ROBOT MỘT BẬC TỰ DO
Hình 1. Cánh tay máy một bậc tự do
Tọa độ của cánh tay máy trong hệ tọa độ
OXY là:
R
R
Xlsin
Ylcos
(1)
Mô hình toán của cánh tay máy một bậc
tự do:
yaybsiny
(2)
trong đó: l là chiều dài của cánh tay máy, m
là khối lượng,
là góc quay của khớp cánh
tay,
moment làm quay khớp nối, và a, b là
các hằng số chưa biết, y =
, u =
.
Hình 2. Khối điều khiển
3. NHẬN DẠNG DÙNG MẠNG NƠ-RON
Trong phần này, ta dùng mô hình toán của
cánh tay máy để tạo ra tín hiệu mẫu:
210
s
in( )
(3)
trong đó,
là mô men hoặc động lực tác động
lên khớp,
là góc quay của khớp.
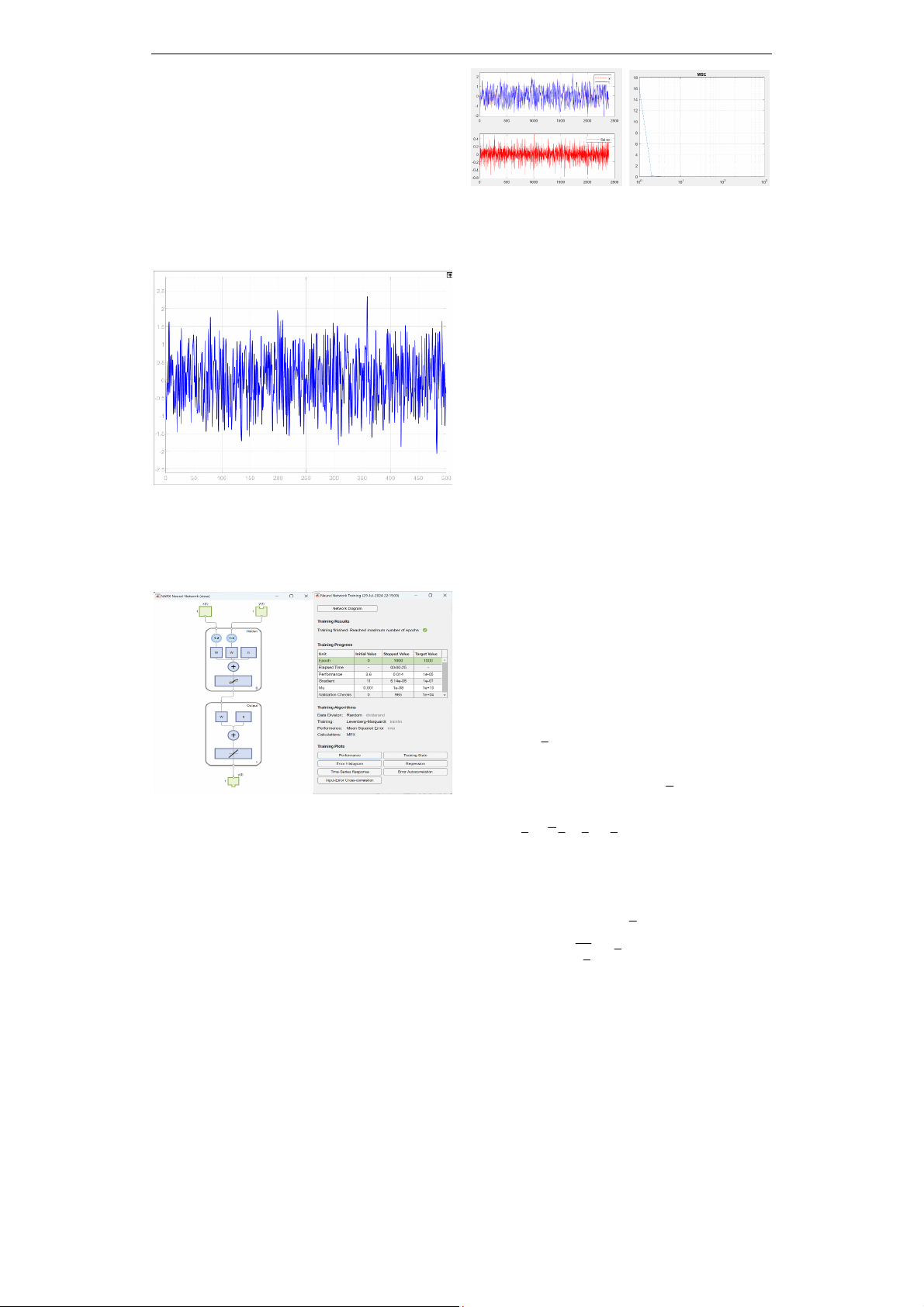
Hình 3. Tín hiệu đầu vào mẫu cho nhận dạng
Tuyển tập Hội nghị Khoa học thường niên năm 2024. ISBN: 978-604-82-8175-5
343
Tín hiệu đầu vào mẫu
sẽ được lựa chọn
có dạng như hình 3. Các hàm bước nhảy có
độ rộng ngẫu nhiên trong đoạn [0.1;1] và
biên độ nằm trong đoạn [-10;10]. Tín hiệu
đầu vào mẫu
sẽ được sử dụng để tác động
vào đối tượng, và đo đầu ra của đối tượng
tương ứng để có tín hiệu đầu ra mẫu. Tín hiệu
đầu ra mẫu thu được từ mô hình như hình 4.
Với đầu vào mẫu p, đầu ra của đối tượng
thu thập được tương ứng là t như hình 5.
Hình 4. Tín hiệu ra vào mẫu cho nhận dạng
Bộ tín hiệu
p
t sẽ dược dùng để huấn
luyện mạng nơ-ron.
Hình 5. Sơ đồ
cấu trúc
mạng nơ-ron
Hình 6. Cấu trúc
mạng nơ-ron
của đối tượng nnp
Sau khi huấn luyện mạng, đáp ứng đầu ra
của mạng nơ-ron và sai số được vẽ trong
hình 7.
Đồ thị hàm mục tiêu theo số kỉ nguyên
huấn luyện như trong hình 8.
Hình 7. Đáp ứng
đầu ra của mạng
nơ-ron và sai số
Hình 8. Đồ thị
hàm mục tiêu
Sau khi huấn luyện mạng nơ-ron của đối
tượng NNp, mạng này sẽ có cấu trúc và tham
số xác định. Bước tiếp theo là dùng phương
pháp điều khiển dự báo MPC để thiết kế bộ
điều khiển dự báo.
4. THIẾT KẾ BỘ ĐIỀU KHIỂN DỰ BÁO
DÙNG MẠNG NƠ-RON
Đáp ứng xấp xỉ đầu ra của hệ thống là:
11 22 33 44
ˆ
y( t ) a v a v a v a v e( t ) (4)
với: y(t) là đáp ứng đầu ra tại thời điểm t, a1,
a2, a3, a4 là các hệ số, và:
0 110 220 330 440
,,,,
e(t) g v av av av av
Áp dụng định luật điều khiển cho bài toán
ta được mô hình dự báo:
32
22
10
d
kk
Jyy(tk) [Δu( t k )]
ˆmin
(5)
Trong thời điểm dự báo t = t + k ta có giá
trị đặt là yd, u là giá trị sai lệch của u tại thời
điểm (t + k + 1) và (t + k).
với:
1
11
221
u( t ) u( t ) u( t )
u( t ) u( t ) u( t )
u( t ) u( t ) u( t )
(6)
với: 1
2
u( t )
uu(t)
u( t )
Từ phương trình hàm
J
(u) ở (5) ta có
phương trình ở bài toán như sau:
1
2
T
J
(u) u Au Bu C min (7)
trong đó: A là ma trận có kích thước 33, là
ma trận đối xứng AT = A trận 31 và C là
hằng số.
Đạo hàm hàm J theo u ta được:
0
JAu B
u (8)
Tuyển tập Hội nghị Khoa học thường niên năm 2024. ISBN: 978-604-82-8175-5
344
Nghiệm của (8) là:
1
*
uAB (9)
Từ (5) ta có đáp ứng đầu ra tại thời điểm t
+ 1, t + 2, t + 3 lần lượt là:
12 34
ˆ(1) () (1) () (1) ()yt ayt ayt aut aut et (10)
1234
ˆ(2) (1) () (1) ()()yt ayt ayt aut aut et (11)
12 4
ˆ(3) (2) (1) (2) (1) ()yt ayt ayt aut aut et (12)
Biến đổi công thức (5) ta được:
32
222
10
222 22
2222
2( ) ( ) ( )
2(1) (1) 2(2) (2)
2(3) (3) () (1) (2)
dd
kk
dd dd d
d
J y yytk ytk utk
yyyt yt yyyt yt y
yyt y t u t u t u t
(13)
Thay (7), (10), (11), (12) vào (13) ta được:
2
12 12
2
12 12
2
1212
2
1212
2
121
2()(1)()(1)()
() ( 1) () ( 1) ()
2(1)()(1)()()
( 1) () ( 1) () ()
2 ( 2) ( 1) ( 2)
dd
dd
dd
Jy yaytayt butbut et
ayt ayt but but et
yyayt aytbut butet
ayt ayt but but et
yyayt ayt but
2
2
1212
22 2
(1) ()
(2) (1) (2) (1)()
(()(1))((1)())((2)(1))
but et
ayt ayt but but et
ut ut ut ut ut ut
(14)
Đặt:
11 2
21 2
31 2
() ( 1) ()
(1) () ()
(2) (1)()
maytayt etn
mayt aytet
mayt ayt et
(15)
Ta được:
2222
1232 12
22 2 2 22
12 2 3 1 2
222 2 2
12 1
12 12
12 11 12
32 (1) (1)
2(1) (1)() 2
(1) 2 (2)
() ( 1)2 2 ( 1) ( 2)2 2
222(
()
dd
d
Jy ymmmbut mbut
mbut m m ut ut b b
ut b b ut b
utut bb ut ut bb
yb b mb bbut
ut
22
12 21 32 1 31
1)
22(1)
(1)2 2 2 (2)2 2
dd
mb ut
ut ybb mbmbut ybmb
(16)
Kết hợp (9) và (16) ta được:
22
12 12
22
12 1 2 12
2
12 1
22 2 0
22 222
022
bb bb
Abb bb bb
bb b
và
12 11 12 22
12 21 32
131
222(1)22(1)
222
22
d
d
d
yb b mb bbut mb ut
Bybbmbmb
yb mb
Kết luận:
Qua quá trình tính toán ta tìm được:
*
** 1
*
()
() ( 1)
(2)
ut
ut ut AB
ut
(17)
Ở chu kì tiếp theo, ta đưa *
u(t) ra điều
khiển đối tượng và thực hiện lại các bước
như trên để tìm 1
*
u(t ).
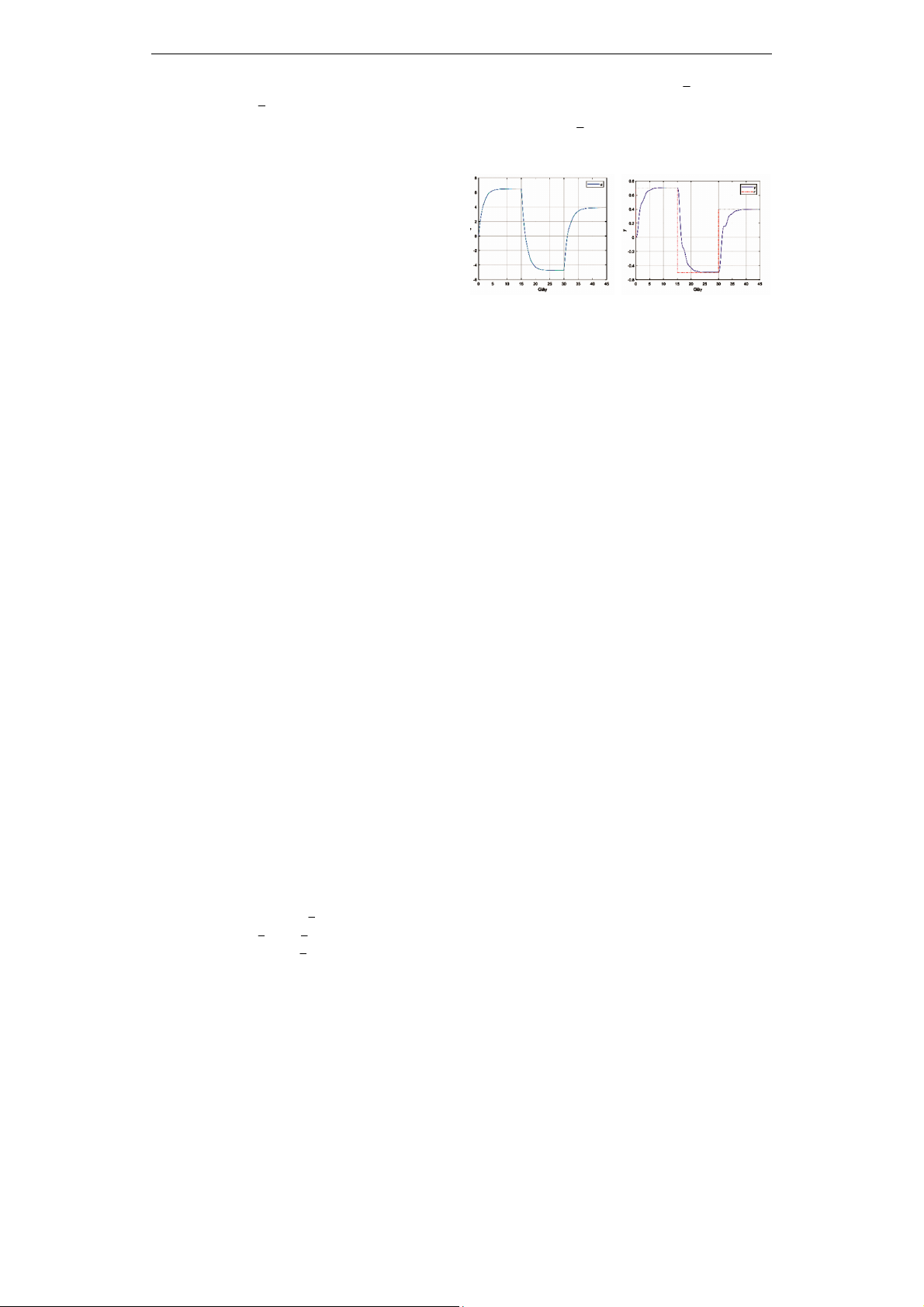
5. KẾT QUẢ MÔ PHỎNG
Hình 9. Tín hiệu
điều khiển tối ưu
Hình 10. Đáp ứng
đầu ra và giá trị đặt
6. KẾT LUẬN
Phương pháp LM dựa trên thuật toán lan
truyển ngược được sử dụng để huấn luyện
mạng nơ-ron cho đối tượng. Sau khi huấn
luyện mạng nơ-ron, ta thu được bộ tham số tối
ưu của mạng. Quan hệ vào ra của mạng là phi
tuyến do đó nếu dùng mô hình mạng này để
thiết kế bộ điều khiển dự báo sẽ gặp khó khăn.
Cho nên, mạng nơ-ron đã được tuyến tính hóa
xung quanh điểm làm việc hiện tại, hàm mục
tiêu có dạng bậc hai, một công thức tổng quát
tìm nghiệm tối ưu đã được xây dựng. Để kiểm
chứng, chương trình mô phỏng và tính toán tín
hiệu điều khiển tối ưu đã được viết. Kết quả
thu được thể hiện tính đúng đắn của thuật toán
và khả thi trong thực tế.
7. TÀI LIỆU THAM KHẢO
[1] Martin T. Hagan, Howard B. Demuth, Mark
H. Beale, Orlando De Jesus, "Neural
Network Design," Ebook.
[2] Nguyễn Doãn Phước, “Tối ưu hóa trong
điều khiển và điều khiển tối ưu”, Nhà xuất
bản Bách Khoa Hà Nội, ngày 28/09/2016.
[3] Nguyễn Hoài Nam, “Bài giảng Điều khiển
mờ và mạng nơ-ron”.
[4] Nørgård, Peter Magnus; Sørensen, Paul
Haase; Poulsen, Niels Kjølstad; Ravn, Ole;
Hansen, Lars Kai, “Intelligent predictive
Control of Nonlienar Processes Using”.
Proceedings of the 1996 IEEE International
Symposium on Intelligent Control.

















![Bài giảng Vi điều khiển Nguyễn Huy Hoàng: Tổng hợp kiến thức [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260316/hoatrami2026/135x160/72211773806757.jpg)






![Bài giảng Tự động hoá thiết bị điện [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260312/hoabattu2026/135x160/61691773631881.jpg)
