NGHIÊN CỨU KHOA HỌC
54 Tạp chí Nghiên cứu khoa học, Trường Đại học Sao Đỏ, Số 4 (79) 2022
Nghiên cứu sự ảnh hưởng của tổng số lượng lấy mẫu
đến chất lượng của phương pháp Polynomial Chaos
Study on the effects of total sampling quantity on the quality
of Polynomial Chaos method
Đào Đức Thụ
Email: ducthuhd@gmail.com
Trường Đại học Sao Đỏ
Ngày nhận bài: 02/11/2021
Ngày nhận bài sửa sau phản biện: 24/8/2022
Ngày chấp nhận đăng: 03/01/2023
Tóm tắt
Trong quá trình nghiên cứu về các bài toán động lực học, việc sử dụng phần mềm mô phỏng sẽ giảm bớt chi phí
về thực nghiệm nhằm tạo ra sản phẩm mới một cách nhanh chóng. Để mô phỏng gần với thực tế thì các bài toán
mô phỏng thường gồm nhiều hệ phương trình phức tạp với nhiều tham số không chắc chắn. Một trong những
phương pháp hiệu quả thường được sử dụng là phương pháp Polynomial Chaos (PC) [7]. Trong bài báo này
tác giả sẽ trình bày ảnh hưởng của cách chọn tổng số lượng lấy mẫu đến chất lượng kết quả của phương pháp
PC. Với các kết quả mô phỏng thu được, tác giả sử dụng phương pháp Monte Carlo (MC) để kiểm chứng lại.
Từ khóa: Phương pháp lấy mẫu; phương pháp Polynomial Chaos; động lực học; biến ngẫu nhiên.
Abstract
In the process of studying dynamic problems, the use of simulation software will reduce the cost of experiments
in order to quickly create new products. To simulate close to reality, simulation problems often include many
complex systems of equations with many uncertain parameters. One of the effective methods commonly used is
the Polynomial Chaos (PC) method [7]. In this paper, the author will present the influence of the total sampling
method on the results quality of the PC method. With the obtained simulation results, the author uses the Monte
Carlo method (MC) to verify.
Keywords: Sampling methods; Polynomial Chaos method; dynamics; random variable.
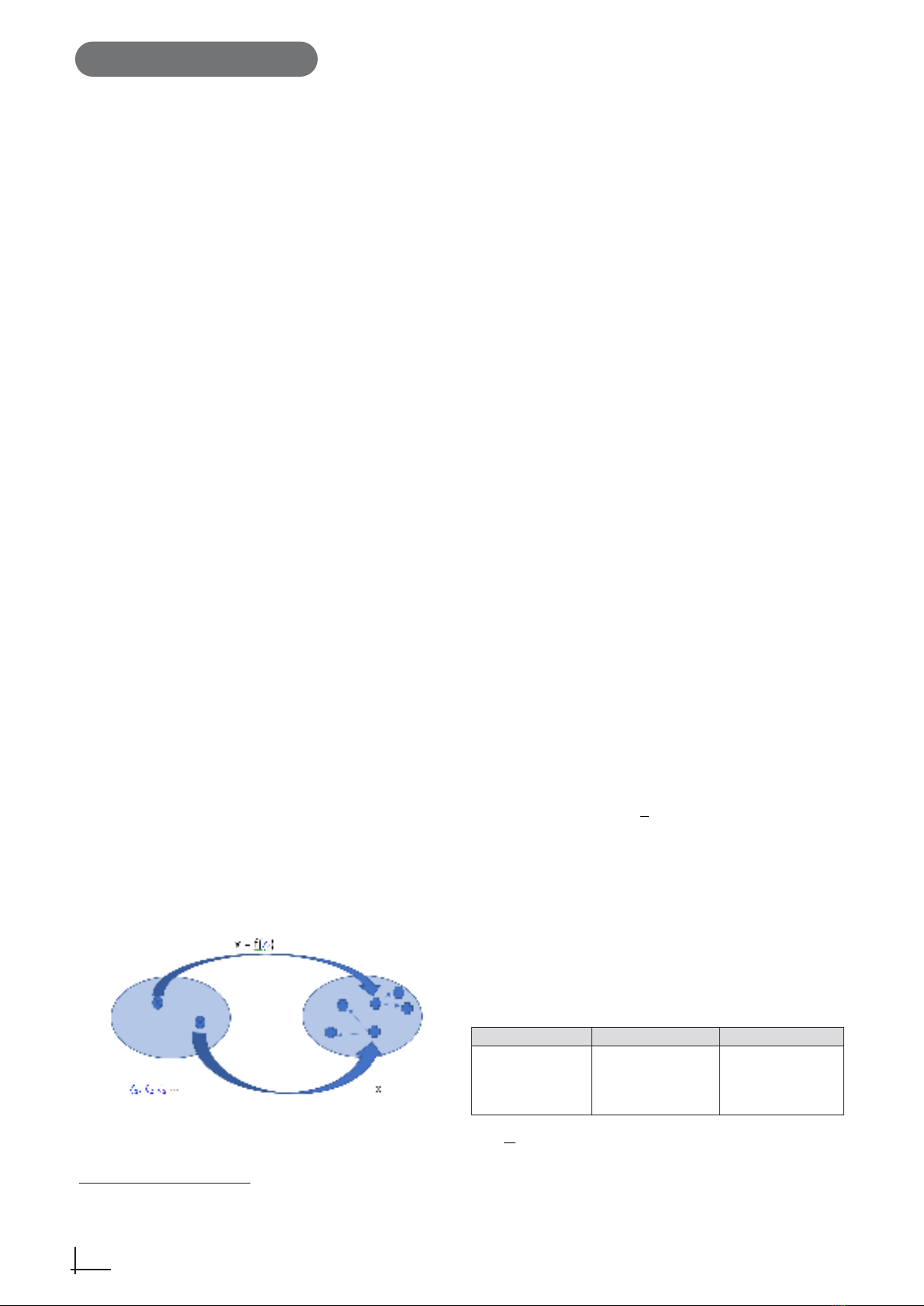
1. PHƯƠNG PHÁP POLYNOMIAL CHAOS
Đây phương pháp tính theo xác suất. Với phương
pháp này người ta sẽ chọn một số lượng mẫu nhỏ,
tính toán trên các mẫu này, các kết quả còn lại sẽ được
nội suy theo kết quả tính toán ở các mẫu. Do đó với
phương pháp này tính toán với số lượng mẫu nhỏ nên
thời gian tính toán được rút ngắn, tuy nhiên kết quả có
sai số.
Hình 1. Sơ đồ khối phương pháp Polynomial Chaos
Với xi là các mẫu được lấy trong tập hợp Ar,p, giá trị
trung bình được tính theo công thức [1], [2]:
),(),(),(
0
txtxtx
j
N
j
j
PC
p
xfxx
å
=
=»
(1)
Trong đó:
fj: Đa thức của PC,
),...,( 1r
xxx
=
là các vectơr độc
lập;
r: Số lượng biến không chắc chắn.
Mối quan hệ giữa các biến này với đa thức của PC sẽ
được thể hiện trong Bảng 1 [2].
Bảng 1. Mối quan hệ giữa biến
x
và đa thức của PC
Biến
x
Đa thức fjGiá trị
Gaussienne
Uniforme
Gamma
Beta
Hermite
Legendre
Legendre
Jacobi
(−∞, +∞)
[a,b]
[0, ∞)
[a,b]
Với
),...( 1r
aaa
=
và biến
x
theo quy luật Uniforme,
theo tài liệu [2] đa thức này được tính theo công thức:
)(...)()()(
)(1
1)()...(
1,,1
rji
r
kjij
rjrj
LL
xxxfxf
aa
Ä== Õ
=
(2)
Người phản biện: 1. PGS. TS. Trần Văn Như
2. TS. Cao Huy Giáp
LIÊN NGÀNH CƠ KHÍ - ĐỘNG LỰC
55
Tạp chí Nghiên cứu khoa học, Trường Đại học Sao Đỏ, Số 4 (79) 2022
Với
)( ji
k
L
(k = 1÷r) là đa thức Legendre được xác định
bởi công thức:
)()()12()()1(
11
xnLxxLnxLn
nnn -+
-+=+
(3)
Với.
1)(
0=xL
và
xxL =)(
1
Theo [9]
a
tính theo công thức:
)...(
1
q
r
q
q
aaa
++=
(4)
(Với phương pháp PC thì q = 1, đối với phương pháp
Polynomial Chaos Creux thì 0<q<1).
Có 2 cách để chọn giá trị cho ||
a
||q [8], [9].
Trường hợp 1 (TH1):
rp
q
´£
a
, với trường hợp
này thì Np được tính theo công thức:
r
p
pN )1( +=
(5)
Trong đó:
r: Số lượng tham số không chắc chắn;
p: Hệ số của đa thức (do người tính toán chọn).
Ví dụ: Việc chọn đa thức với 1 hệ thống có 2 tham
số không chắc chắn (r = 2) và hệ số của đa thức
p = 2. Việc chọn
a1
và
a2
cần đảm bảo các điều kiện như:
và
p£
1
a
p£
2
a
rp
q
´£
a
Để đảm bảo các điều kiện trên thì việc chọn
a
1
và
a
2
được thể hiện trong Bảng 2. Các kết quả ||
a
||q không
đảm bảo được điều kiện
rp
q
´£
a
sẽ được thể hiện
là mầu đỏ nét đậm và bị gạch ở chân.
Bảng 2. Chọn biến ||
a
||q trường hợp
rp
q
´£
a
a
1
a
2
||
a
||q
0 0 0
01 1
0 2 2
101
1 1 2
123
2 0 2
21 3
2 2 4
Với các kết quả như trên các biến
a
1
,
a
2
sẽ được thể
hiện như Hình 2.
0 0.5 11.5 2 2.5 3
1
0
0.5
1
1.5
2
2.5
3
2
Hình 2. Chọn
a
1
,
a
2
trong trường hợp
rp
q
´£
a
Trường hợp 2 (TH2):
rp
q
´£
a
, với trường hợp này
thì Np được tính theo công thức:
!!
)!(
1rp
rp
Np
+
=+
(6)
Tương tự như trong trường hợp 1, để đảm bảo các
điều kiện thì các kết quả không đạt yêu cầu sẽ được
thể hiện là mầu đỏ nét đậm và có gạch ở chân.
Bảng 3. Chọn biến ||
a
||q trường hợp
2=£p
q
a
a
1
a
2
||
a
||q
0 0 0
01 1
0 2 2
101
1 1 2
123
2 0 2
213
2 2 4
Với các kết quả thu được ở Bảng 3
a
1
,
a
2
sẽ được
biểu diễn thông qua Hình 3.
0 0.5 11.5 2 2.5 3
1
0
0.5
1
1.5
2
2.5
3
2
Hình 3. Chọn
a
1
,
a
2
trong trường hợp
2£p
q
a
j
x
là hệ số của PC được tính theo công thức:
)()())()((
)()(1)()( qqTqqT
xx
xxfxfxf
-
=
(7)
Với
),...,( )()(
1
)( q
r
q
q
xxx
=
với q = 1,…,Q.
)( )(q
xf
được xác định bởi công thức:
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
è
æ
=
-
-
)()(
)()(
)(
)()(
0
)()(
0
)(
1
1
Q
N
Q
q
N
q
q
p
p
xfxf
xfxf
xf
!
"#"
!
(8)
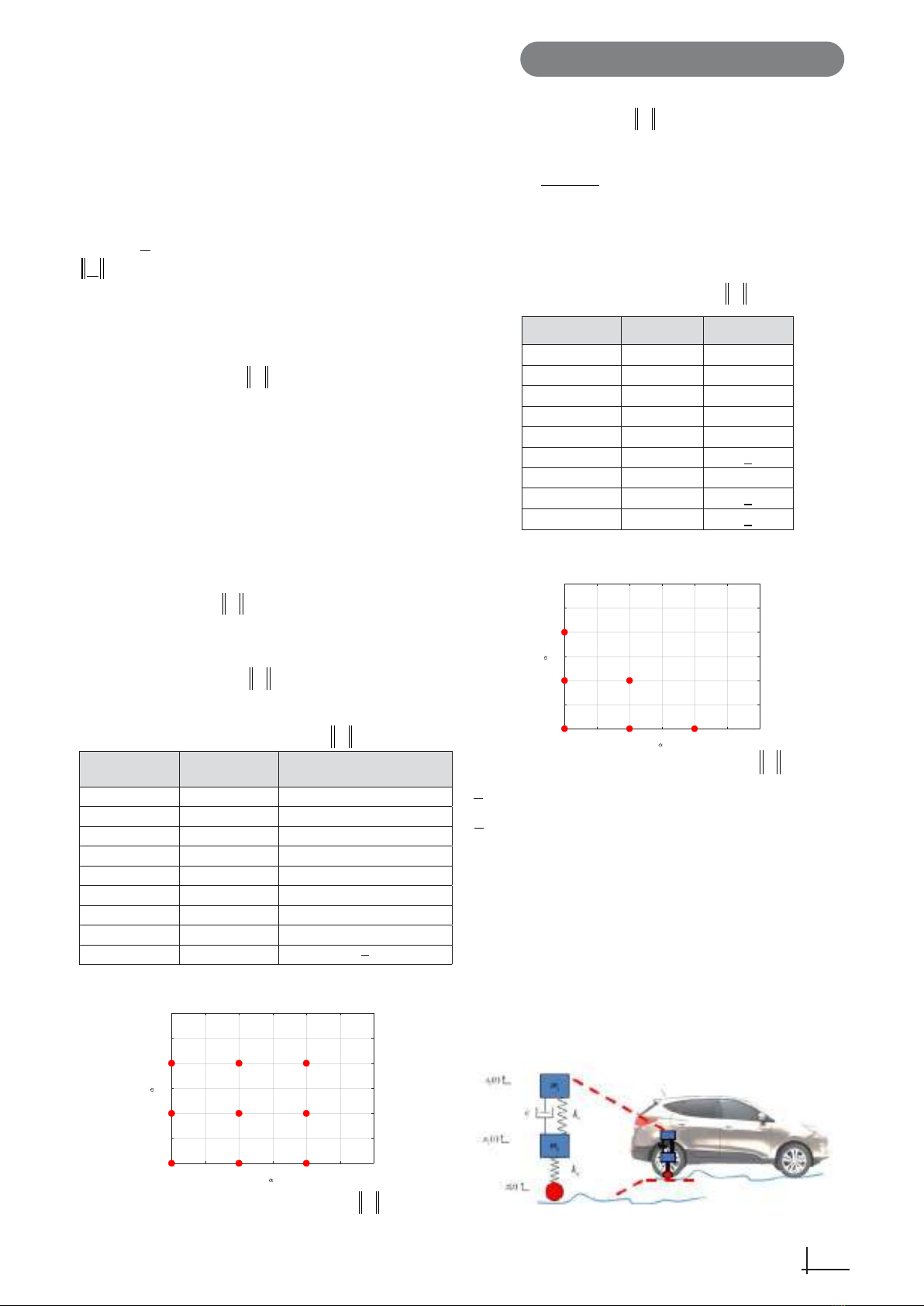
2. MÔ HÌNH DAO ĐỘNG 1/4 TRÊN Ô TÔ
Hình 4. Mô hình dao động 1/4 trên ô tô
NGHIÊN CỨU KHOA HỌC
56 Tạp chí Nghiên cứu khoa học, Trường Đại học Sao Đỏ, Số 4 (79) 2022
Theo tài liệu [5], [6], [7] mô hình dao động 1/4 trên ô tô
được mô tả như sau:
))(()()( 2
.
2
.
1
3
21
..
2xtzkxxcxxkxm usu -+-+-=
(9)
)()(
.
2
.
1
3
21
..
1
xxcxxkxm
ss
----=
(10)
Trong đó:
ms : Khối lượng của phần được treo;
mu: Khối lượng của phần không được treo;
ks: Độ cứng của hệ thống treo;
c: Hệ số cản giảm chấn;
ku: Độ cứng của bánh xe;
z(t): Độ nhấp nhô của mặt đường;
x1(t): Hệ tọa độ gắn với thân xe;
x2(t): Hệ tọa độ gắn với bánh xe.
Trong quá trình xe ô tô chuyển động có một số bộ phận
của hệ thống treo sẽ thay đổi thông số phi tuyến như:
Độ cứng của lốp xe, gối đỡ cao su,… Tác giả đề xuất
giá trị của độ cứng hệ thống treo và độ cứng của bánh
xe thay đổi trong khoảng 10%.
Bảng 4. Thông số của xe ô tô được khảo sát [5]
Thông số Giá trị
ks400 N/m ± 10%
ku2000 N/m ± 10%
ms40 kg
mu20 kg
c600 Ns/m
Zmax 0,2 m
3. KẾT QUẢ NGHIÊN CỨU
Để so sánh giữa các phương pháp tính toán, bài
báo sử dụng phương pháp so sánh sai lệch giá trị
bình phương trung bình của đại lượng so sánh theo
biểu thức:
T =
ò
òò
-
t
MC
t
MC
t
PC
dtx
dtxdtx
0
2
0
2
0
2
(11)
Trong đó:
xPCX: Kết quả của phương pháp PC;
xMC: Kết quả của phương pháp Monte Carlo;
t: Thời gian tính toán.
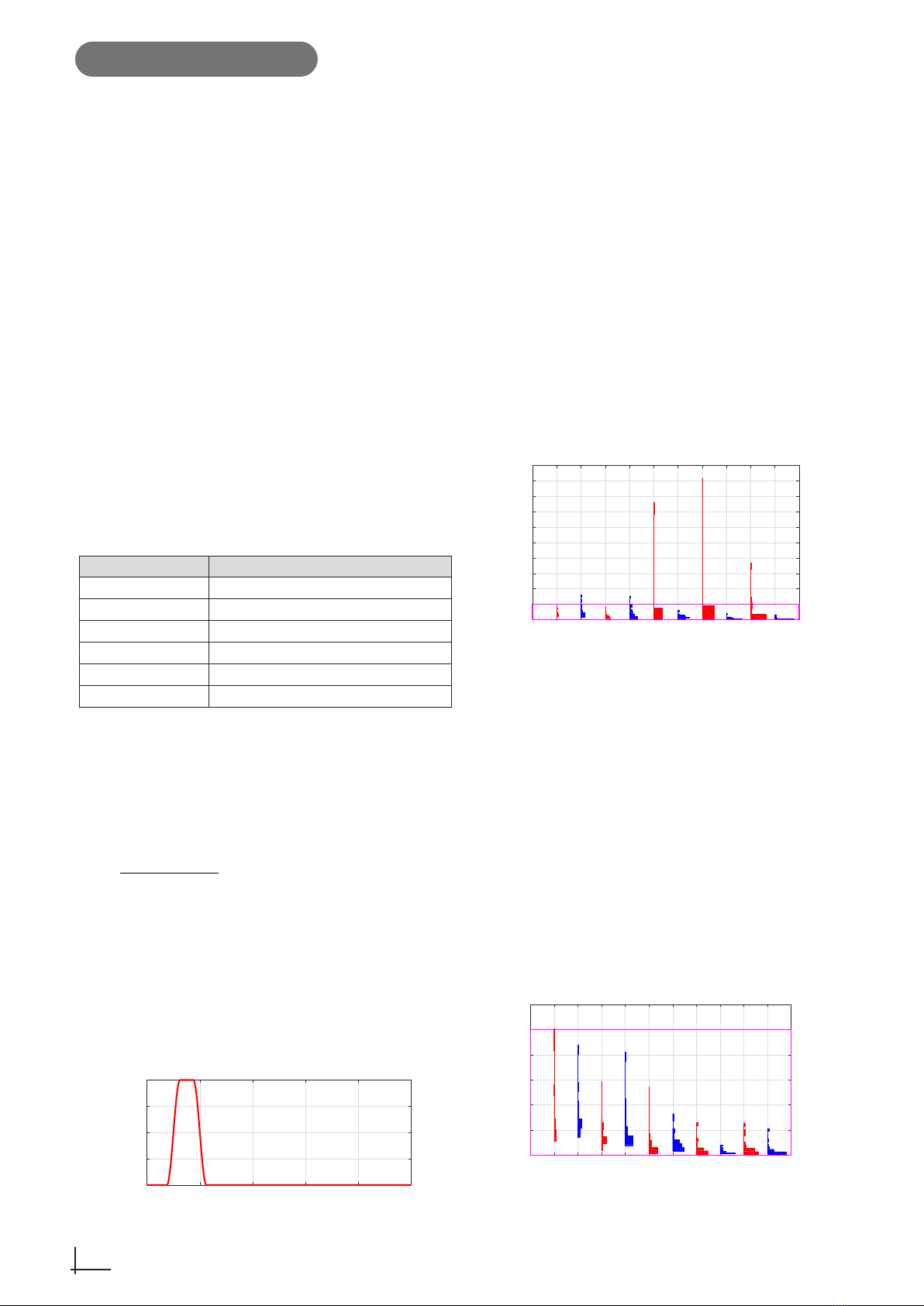
Từ các phương trình (9), (10), sử dụng phần mềm
Matlab phỏng với trường hợp đầu vào là mặt đường
được mô phỏng như Hình 5:
0 2 4 6 8 10
thời gian
0
0.05
0.1
0.15
0.2
Z(t)
Hình 5. Độ nhấp nhô của mặt đường
Từ Hình 5 ta thấy quá trình chuyển động của xe mô
phỏng: Trong giây đầu tiên xe chuyển động trên mặt
đường bằng phẳng sau đó gặp mấp mô với độ cao
là 0.2 m trong một giây sau đó xe tiếp tục đi trên mặt
đường bằng phẳng.
Với các điều kiện tính toán như trên, tác giả thu được
kết quả tính toán theo các phương pháp lấy mẫu lần
lượt là: Monte Carlo (MC), Hypercube latin ngẫu nhiên
(LHSa), Hypercube latin xác định (LHSd) và lấy mẫu
bằng cách sử dụng nghiệm của các đa thức (RR) [3],
[4], [8]. Các tính toán sẽ được thực hiện trong trường
hợp với p = 2÷6. Do các kết quả sau mỗi lần tính toán
khác nhau, để quan sát được vùng sai số của các
trường hợp tính toán, tác giả đã thực hiện các phép
tính lặp lại 30 lần. Để tiện cho việc so sánh độ tin cậy
của các kết quả, tác giả đề xuất giá trị tuyệt đối sai số
nhỏ hơn 1%.
* Với phương pháp lấy mẫu là MC.
p*r p p*r p p*r p p*r p p*r p
p=2 p=3 p=4 p=5 p=6
0
1
2
3
4
5
6
7
8
9
10
sai số (%)
Hình 6. Phương pháp lấy mẫu MC
Hình 6 thể hiện kết quả của sai số giữa phương pháp
PC sử dụng phương pháp lấy mẫu là MC với phương
pháp MC. Các khối hình mầu đỏ thể hiện kết quả của
phương pháp PC với tổng số lượng lấy mẫu là p × r,
các khối mầu xanh thể hiện kết quả của phương pháp
PC với tổng số lượng lấy mẫu là p. Với đề xuất giá trị
tuyệt đối sai số nhỏ hơn 1%, tác giả tạo hình chữ nhật
mầu hồng có tọa độ trên trục y với giá trị từ 0 đến 1.
Các kết quả nếu nằm trong hình chữ nhật mầu hồng
này sẽ là các kết quả đạt yêu cầu, các giá trị nằm bên
ngoài là các giá trị không đạt yêu cầu. Với các kết quả
ở Hình 6 ta thấy rằng đối với phương pháp PC với tổng
số lượng lấy mẫu là p × r thì khi p tăng thì giá trị không
hội tụ. Đối với phương pháp PC với số lượng lấy mẫu
là p thì khi p tăng thì kết quả có xu hướng tốt hơn và
hội tụ về 0.
* Với phương pháp lấy mẫu là LHSa.
p*r p p*r p p*r p p*r p p*r p
p=2 p=3 p=4 p=5 p=6
0
0.2
0.4
0.6
0.8
1
1.2
sai số (%)
Hình 7. Phương pháp lấy mẫu LHSa
Dựa vào kết quả của Hình 7 ta thấy rằng với p = 2 thì
LIÊN NGÀNH CƠ KHÍ - ĐỘNG LỰC
57
Tạp chí Nghiên cứu khoa học, Trường Đại học Sao Đỏ, Số 4 (79) 2022
kết quả của phương pháp PC với tổng số lượng lấy
mẫu là p × r là không đạt yêu cầu, các kết quả còn lại
đều đạt yêu cầu. Khi p tăng thì các kết quả đều có xu
hướng hội tụ về 0.
* Với phương pháp lấy mẫu là LHSd.
p*r p p*r p p*r p p*r p p*r p
p=2 p=3 p=4 p=5 p=6
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
sai số (%)
Hình 8. Phương pháp lấy mẫu LHSd
Do ở Hình 8, các kết quả đều đạt yêu cầu và có xu
hướng hội tụ về 0 khi p tăng.
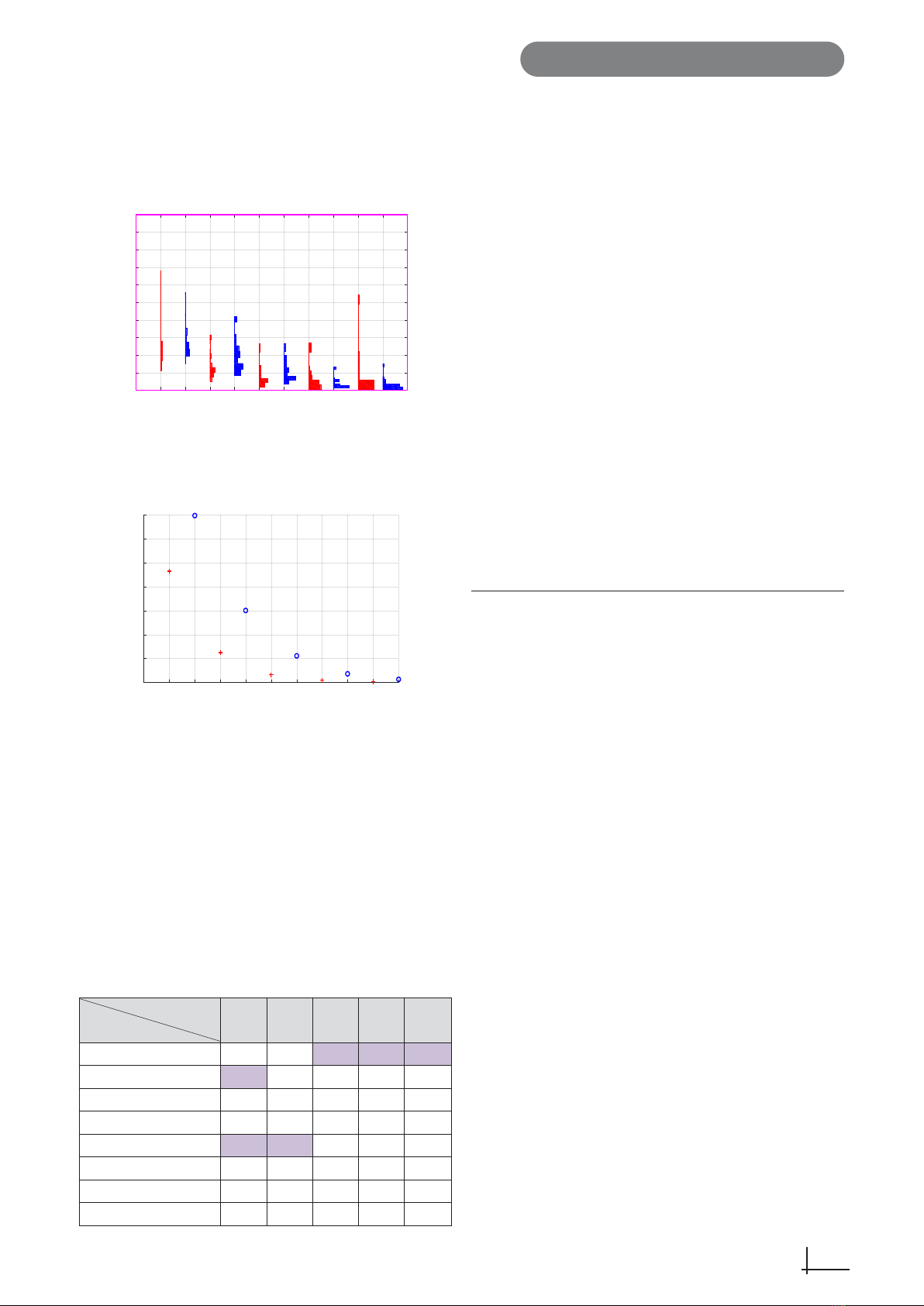
* Với phương pháp lấy mẫu là RR.
p*r p p*r p p*r p p*r p p*r p
p=2 p=3 p=4 p=5 p=6
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
sai số (%)
Hình 9. Phương pháp lấy mẫu RR
Do các kết quả ở Hình 9 đều đạt yêu cầu nên tác giả
không vẽ hình chữ nhật, để có thể quan sát rõ sự khác
biệt giữa các kết quả. Dựa vào Hình 9 ta thấy rằng khi
so sánh với cùng thông số đầu vào thì các kết quả của
phương pháp PC với tổng số lượng lấy mẫu là p × r
có chất lượng tốt hơn các kết quả của phương pháp
PC với tổng số lượng lấy mẫu là p. Với phương pháp
lấy mẫu là RR thì chất lượng kết quả đạt tốt nhất so
với các trường hợp lấy mẫu ở trên. Để tìm ra được
phương pháp tối ưu, tác giả tạo ra Bảng 5, trong bảng
này có thể hiện chất lượng và thời gian tính toán của
các phương pháp.
Bảng 5. Thời gian tính toán
p
t (giây) 2 3 4 5 6
TH1 với MC 1.58 2.2 3.04 3.56 5.31
TH1 với LHSa 1.83 2.48 3.52 4.02 5.82
TH1 với LHSd 1.92 2.51 3.67 4.23 5.93
TH1 với RR 1.86 2.62 3.55 4.07 5.87
TH2 với MC 0.42 0.63 0.78 1.36 2.37
TH2 với LHSa 0.47 0.73 1.03 1.95 2.68
TH2 với LHSd 0.48 0.74 1.34 2.10 2.87
TH2 với RR 0.48 0.68 1.08 1.93 2.72
Trong Bảng 5 các kết quả không đạt yêu cầu được
thể hiện là các ô được bôi mầu vàng nét đậm, các kết
quả đạt yêu cầu sẽ được thể hiện là các ô mầu trắng.
Dựa vào Bảng 3 ta thấy rằng thời gian tính toán của
phương pháp PC với tổng số lượng lấy mẫu là p ngắn
hơn so với thời gian tính toán của phương pháp PC
với tổng số lượng lấy mẫu là p × r. Dựa vào Bảng 3
ta có thể chọn được phương pháp tối ưu của bài toán
là: tính toán của phương pháp PC với tổng số lượng
lấy mẫu là p, phương pháp lấy mẫu là LHSa và p = 2
thì thời gian tính toán là ít nhất và kết quả vẫn đảm bảo
được chất lượng.
4. KẾT LUẬN
Khi tính toán với phương pháp PC, tổng số lượng lấy
mẫu ảnh hưởng đến chất lượng và thời gian tính toán
của phương pháp. Khi tính toán bằng phương pháp lấy
mẫu là RR và tổng số lượng lấy mẫu là p × r thì ta sẽ
có chất lượng kết quả là tốt nhất. Tuy nhiên, để đảm
bảo tiêu chí chất lượng và thời gian tính toán hợp lý thì
tác giả khuyến nghị nên tính toán bằng phương pháp
lấy mẫu là RR với tổng số lượng lấy mẫu là p. Phương
pháp này có thể mở rộng để áp dụng cho các bài toán
nghiên cứu về động lực học của ô tô.
TÀI LIỆU THAM KHẢO
[1]. Wiener N. (1938), The Homogeneous
Chaos, American Journal of Mathematics.
American Journal of Mathematics, Vol. 60, No.
4. 60 (4): 897–936. doi:10.2307/2371268.
[2]. Dongbin Xiu and George Em Karniadakis
(2002), The wiener–askey polynomial chaos for
stochastic differential equations, SIAM Journal on
Scientifific Computing, 24(2):619–644, 2002.
[3]. H. Niederreiter (1992), Random Number
Generation and Quasi-Monte Carlo Methods,
CBMS-NSF Regional Conference Series in
Applied Mathematics, Society for Industrial and
Applied Mathematics.
[4]. M. D. McKay, R. J. Beckman, W. J. Conover
(1979), A Comparison of Three Methods for
Selecting Values of Input Variables in the Analysis
of Output from a Computer Code, Technometrics
21 (2) 239–245. doi:10.2307/1268522.
[5]. Gaurav Kewlania, Justin Crawfordb and Karl
Iagnemmaa (2012), A polynomial chaos
approach to the analysis of vehicle dynamics
under uncertainty.
[6]. Ling Feng, Ma Ze-Yu,Tang Zheng-Fei, Chen
Yong-Fu (2013), Uncertainty Analysis of Vehicle
Suspension Systems Based on Polynomial
Chaos Methods.
[7]. Đào Đức Thụ, Phạm Văn Trọng, Trần Quang
Thanh (2019), Nghiên cứu phương pháp
Polynomial Chaos áp dụng cho hệ thống treo trên
ô tô, Tạp chí nghiên cứu khoa học Đại học Sao
đỏ, số 2.
NGHIÊN CỨU KHOA HỌC
58 Tạp chí Nghiên cứu khoa học, Trường Đại học Sao Đỏ, Số 4 (79) 2022
[8]. Đào Đức Thụ, Lương Quý Hiệp, Phạm Văn Trọng
(2021), Nghiên cứu sự ảnh hưởng của phương
pháp lấy mẫu đến chất lượng của phương pháp
polynomial chaos áp dụng cho hệ thống treo trên
ô tô, Tạp chí nghiên cứ khoa học Đại học Sao
đỏ, số 1.
[9]. Géraud Blatman and Bruno Sudret (2009),
Anisotropic parcimonious polynomial chaos
expansions based on the sparsity-of-effects
principle. In Proc ICOSSAR’09, International
Conference in Structural Safety and Relability.
Đào Đức Thụ
- Năm 2020: Tốt nghiệp Tiến sĩ chuyên ngành Kỹ thuật cơ khí, Trường INSA Centre Val de
Loire, Pháp.
- Tóm tắt công việc hiện tại: Giảng viên khoa Ô tô, Trường Đại học Sao Đỏ.
- Lĩnh vực giảng dạy, nghiên cứu: Cơ điện tử trên ô tô, mô hình hóa và mô phỏng các hệ
thống động lực.
- Điện thoại: 0865996170; Email: ducthuhd@gmail.com.
THÔNG TIN TÁC GIẢ














![Bài tập Đại số tuyến tính [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/dkieu2177@gmail.com/135x160/79831759288818.jpg)









