NHẬN DẠNG, XÂY DỰNG THUẬT TOÁN THÍCH NGHI
TỰ CHỈNH GIÁN TIẾP CHO HỆ KHÍ ĐỘNG HỌC
QUẠT GIÓ CÁNH PHẲNG
ThS. AN HOÀI THU ANH
Bộ môn Kỹ thuật điện
Khoa Điện - Điện tử
Trường Đại học Giao thông Vận tải
Tóm tắt: Xác định hàm truyền bằng phương pháp thực nghiệm, xây dựng thuật toán điều
khiển thích nghi gián tiếp ISTR được thiết kế cài đặt ứng dụng cho đối tượng khí động học
quạt gió cánh phẳng (QGCP), qua đó ứng dụng phương pháp nhận dạng, và thiết kế các bộ
điều khiển thích nghi để điều khiển đối tượng được coi là “hộp đen”.
Summary: This paper introduces the accurately relative identification of transfer
functions and the design of Indirect Self - Turning Regulators for fan and plate control
apparatus, thereby using this identifing method for “black boxes” and designing adaptive
regulators to control them.
I. ĐẶT VẤN ĐỀ
Đối tượng điều khiển QGCP là một mô hình thí nghiệm giàu tính động học, phạm vi ứng
dụng rộng rãi cho các hệ điều khiển đơn giản như điều khiển PID Ziegler-Nickols, Takahashi, áp
đặt cực (PPC), dự đoán Smith đến hệ điều khiển phức tạp như điều khiển thích nghi, điều khiển tối
ưu, điều khiển thích nghi bền vững v.v… thông qua việc cài đặt thuật toán điều khiển bằng
chương trình phần mềm trên máy tính để điều khiển thiết bị, ta có thể đánh giá, so sánh chất lượng
của các hệ điều khiển khác nhau cùng như kiểm nghiệm lại từng thuật toán khác nhau.
ĐT
II. NỘI DUNG
1. Cơ sở xây dựng và nhận dạng mô hình động lực học QGCP
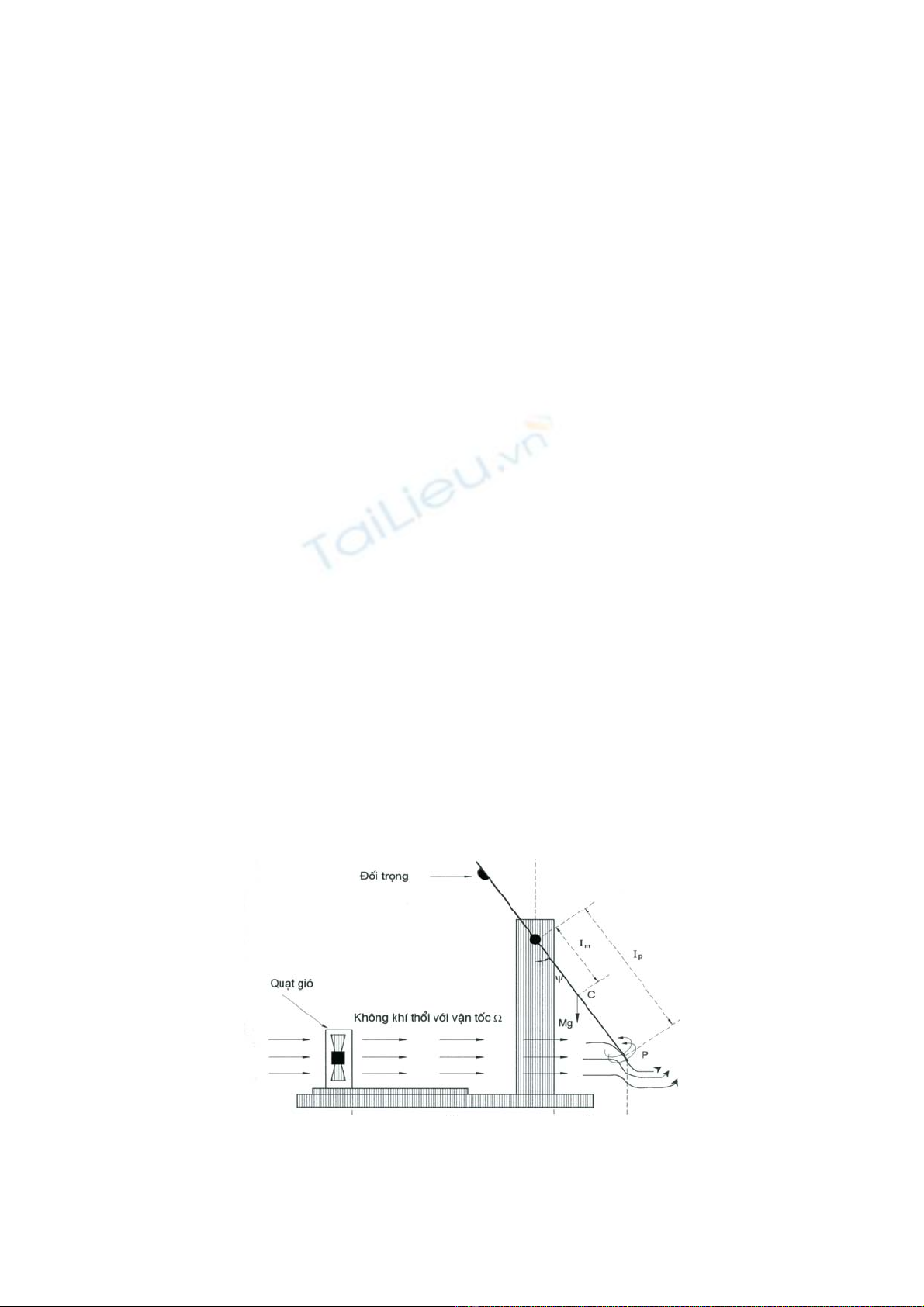
1.1. Mô hình động lực học QGCP - sơ đồ khối của mô hình:
ĐT
Gọi Ψ: Góc giữa cánh nhôm và trục thẳng đứng
Mg: Trọng lượng của cánh (kể cả đối trọng)
C: Trọng tâm của hệ
Ω: Vận tốc luồng gió
Các khoảng cách lM, lP,L1,L2 xác định như hình vẽ
J: Quán tính quay của bản lề
M : Khối lượng của cánh phẳng
A: diện tích hữu ích trên của cánh
b: Hệ số suy giảm
P: Áp suất tác động lên cánh phẳng
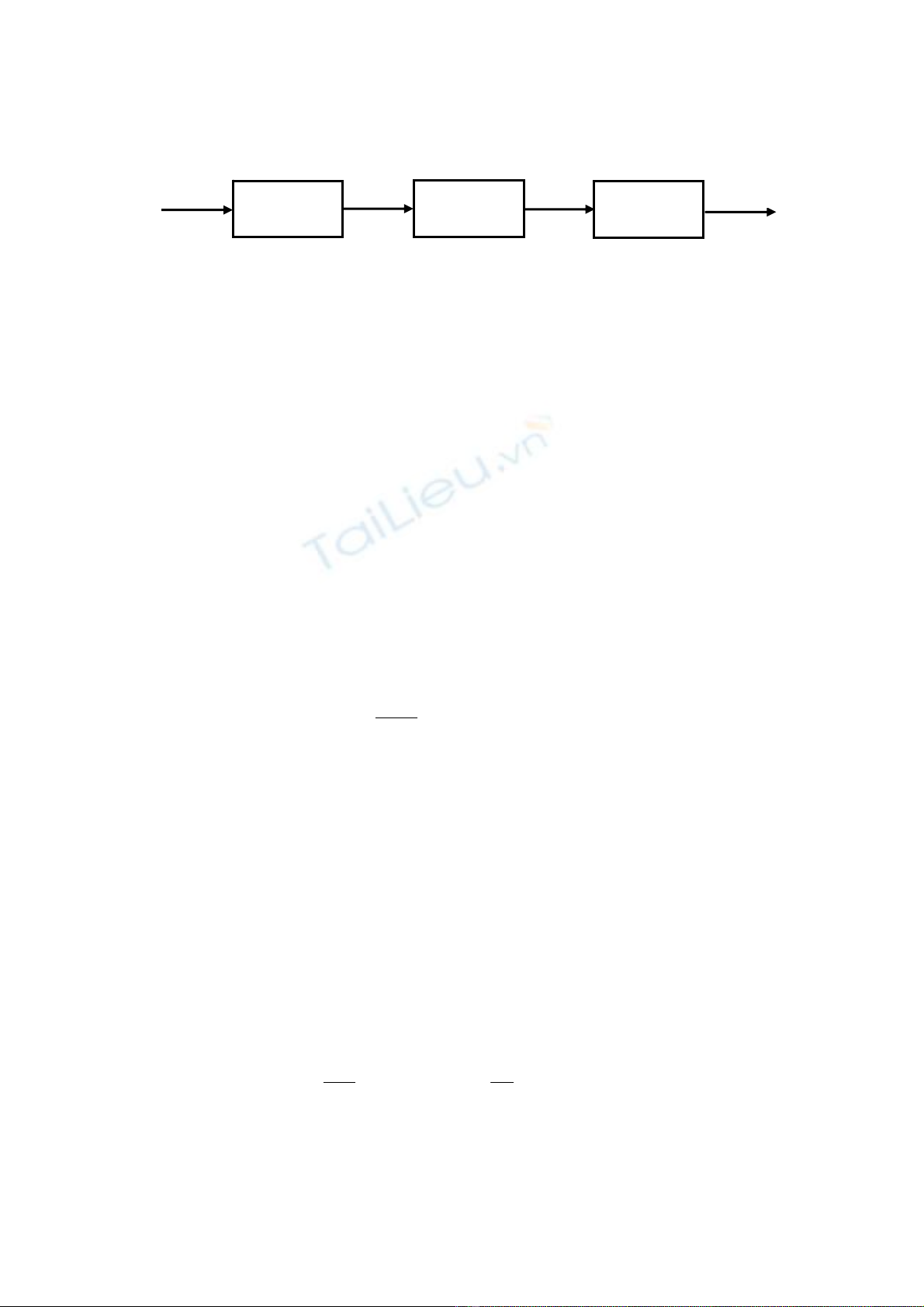
Mô hình được chia làm ba phần:
Khối quạt gió biểu diễn dưới dạng:
111 C)t(VK)t(
d
t
)t(d
T+=Ω+
Ω
T1: Hằng số thời gian
K1: Hệ số khuyếch đại ở trạng thái xác lập.
C1: Hằng số điều kiện đầu
Khối động học dòng khí: Diễn tả quan hệ giữa vận tốc dòng khí Ω và áp suất khí đập lên
cánh phẳng. Khi Ω thay đổi, có hai yếu tố cần tính đến : Sự trễ chuyển động của cánh phẳng,
dòng khí chuyển động xoáy bên dưới và xung quanh cánh phẳng. Ta coi khâu này gồm trế dịch
chuyển, một dạng phi tuyến căn bậc hai và động lực học phụ thuộc hướng.
Khối biểu thị quan hệ giữa Ψ và P. Xem cánh phẳng là con lắc vật lý. Mô hình động lực
học cánh phẳng :
Ψ+
ψ
−ψ−=
ψcosPAl
dt
d
bsinMgl
dt
d
JpM
2
2
Điện áp đặ
t
vào động cơ, V Động học
dòng khí
Áp suất
P
Vận tốc
Ω Góc Ψ
Cánh phẳng
Quạt gió
1.2. Mô hình tuyến tính hoá:
Hệ thống QGCP là một hệ phi tuyến có mô hình phức tạp. Để thuận lợi khi thiết kế điều
khiển, ta tiến hành tuyến tính hoá xung quanh đoạn đặc tính làm việc với những thay đổi góc
quay nhỏ. Gọi vss, Ωss, Pss,
s
s
Ψ lần lượt là điện áp vào, vận tốc không khí, góc của cánh. Với
nhiễu nhỏ v của điện áp, VÆ Vss+v và lượng thay đổi nhỏ vận tốc
ω
thì Ω Æ Ωss + ω.
Ta có hàm truyền của toàn bộ thiết bị:
ω
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
Ψ+Ψ++
Ψ
+
=
ϕ
=
τ−
)sinAlPcosMg(bsJs
cosAle
)sT1(
K
)s(p
)s(
)s(G
sspssss
2
ssp
s
1
1
2
τ2: Thời gian trễ (phụ thuộc vào vận tốc dòng khí và L1).
Tuy nhiên hàm truyền G(s) của đối tượng điều khiển QGCP là hàm bậc 3, trong đó bỏ qua
sự xoáy của dòng khí gây ra dao động của cánh nên có sự sai lệch giữa hàm truyền G(s) với mô
hình thật. Ngoài ra các tham số thay đổi theo chế độ làm việc và luôn chịu tác động của nhiễu,
và để xác định được các tham số M, g, A, L, J… của đối tượng rất khó khăn. Vì vậy để khắc
phục những khó khăn này ta sẽ tiến hành nhận dạng mô hình toán học của đối tượng QGCP
bằng thực nghiệm.
1.3. Nhận dạng thông số cho đối tượng QGCP
ĐT
Dùng tín hiệu chuẩn (hàm bậc thang, tín hiệu giả ngẫu nhiên, tín hiệu điều hoà) ở đầu vảo
của đối tượng và ghi lại phản ứng của đối tượng ở đầu ra. Trên cơ sở phản ứng của đối tượng
đối với tín hiệu đầu vào, ta xác định được hàm truyền của đối tượng dựa trên đặc tính quá độ,
sau đó chọn các thông số của nó. Như vậy độ chính xác của phương pháp này phụ thuộc vào
việc chọn mô hình toán học có thích hợp hay không và độ chính xác của phép chọn các thông số
cho mô hình. Sau khi xác định được mô hình ta phải kiểm tra lại độ chính xác của mô hình bằng
cách so sánh phản ứng cảu mô hình và của đối tượng khi chúng có cùng đối tượng kích thích.
Nếu sai số năm trong giới hạn cho phép thì phải hiệu chỉnh lại các thông số của mô hình để đạt
được sai số cho phép. Nếu không đạt được thì phải thay đổi cả mô hình và xác định lại các
thông số của nó cho tới khi đạt độ chính xác cần thiết.
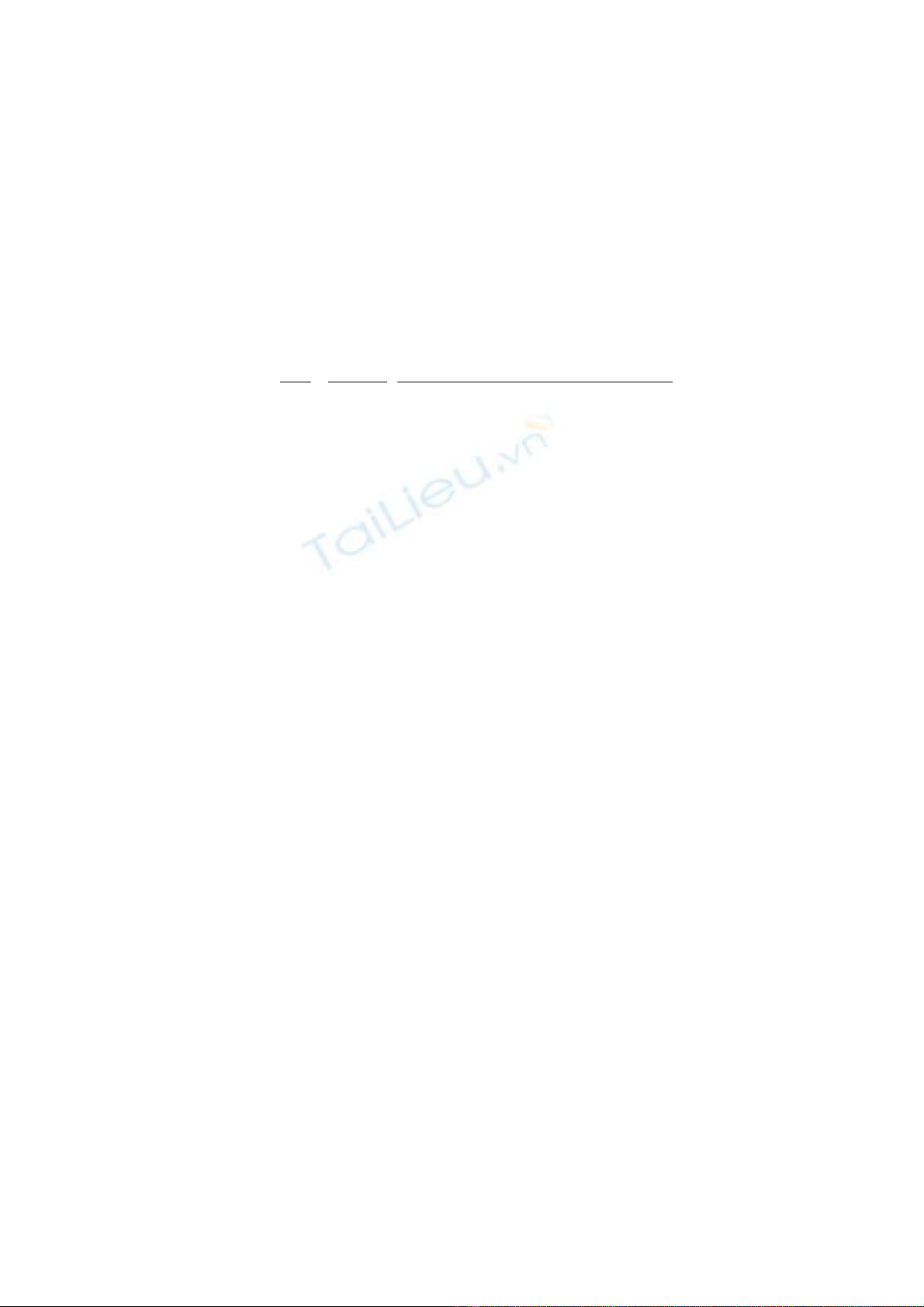
1.4. Các bước cơ bản, lưu đồ của nhận dạng thông số hệ thống
Việc nhận dạng các thông số hệ thống bao gồm các bước sau:
- Thu thập dữ liệu vào/ra của hệ thống
- Chọn cấu trúc cảu mô hình
- Đánh giá thông số của mô hình
- Hợp thức mô hình được nhận dạng
Bắt đầu
Những kiến thức đã
biết về mô hình
Cho dữ liệu mới
Đánh giá thông số mô hình
Mô hình được chấp
nhận
Kết thúc
Lập kế hoạch thực nghiệm
Hợp thức hoá mô hình
Làm t/nghiệm thu thập dữ liệu
Chọn cấu trúc của mô hình
Sai
Đúng
ĐT
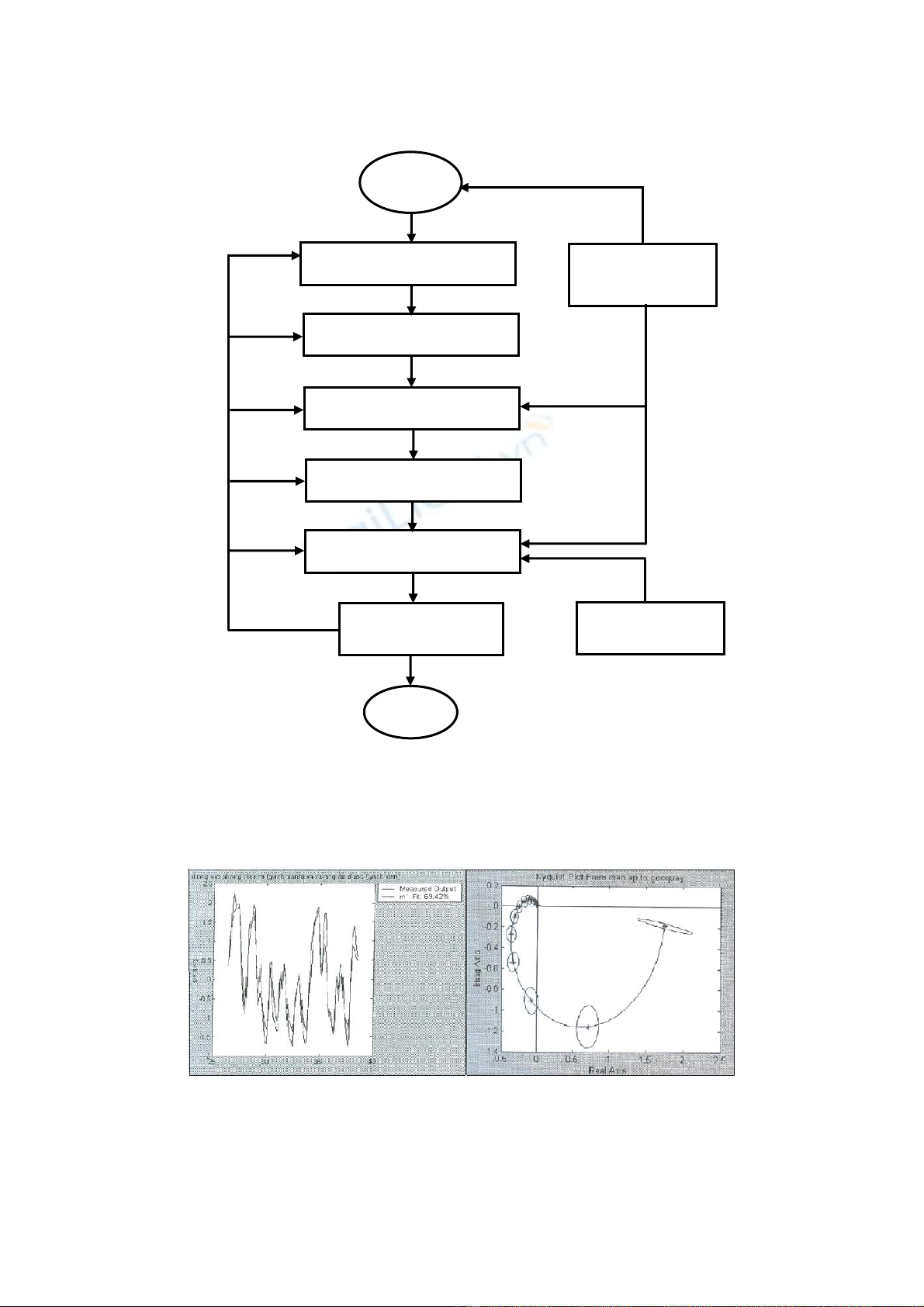
Ta thu thập dữ liệu sau khi phát dãy xung nhị phân và thu được đáp ứng, chọn cấu trúc mô
hình đánh giá dạng ARX (221), đánh giá thông số của mô hình dựa trên một trong các chỉ tiêu:
Chỉ tiêu bình phương cựu tiểu, chỉ tiêu sai số dự đoán cuối cùng FPE… nhờ phần mềm chuyên
dùng Ident Toolbox trong Matlab có kết quả sau: Độ phù hợp giữa tín hiệu ra bằng thực nghiệm
với tín hiệu ra mô phỏng là 69,42%. Điều đó chứng tỏ mô hình đã chọn là phù hợp
Hình 1. So sánh tín hiệu đo được và tín hiệu mô phỏng, tiêu chuẩn ổn định Nyquist
Bằng phương pháp thực nghiệm ta nhận dạng được mô tả toán học của đối tượng QGCP:
01
2
01
azaz
bzb
)z(G ++
+
=
01
2
01
azaz
bzb
)z(G ++
+
=
2. Hệ điều khiển thích nghi tự chỉnh cho đối tượng QGCP
Xác định được mô tả toán học của đối tượng QGCP, tiếp đến để nâng cao tính ổn định của
hệ thống ta sử dụng một số sơ đồ điều khiển thích nghi (điều chỉnh hệ số khuyếch đại, điều
khiển thích nghi theo mô hình mẫu, hệ thống tự chỉnh), đối với mô hình QGCP thì điều khiển
thích nghi tự chỉnh là phù hợp nhất. Hệ thống điều khiển thích nghi tự chỉnh bao gồm hai phần:
Đánh giá thông số và tính toán thông số, ở đây đưa ra hệ thống điều khiển thích nghi áp đặt cực-
thích nghi gián tiếp (APPC – Adaptive pole Placement) là sự kết hợp của một luật điều khiển áp
đặt cực với một luật đánh giá tham số.
Tính toán thông
số bộ điều khiển
Đánh giá thông
số hệ thống
Bộ điều khiển Hệ QGCP
U
(Tín hiệu đặt)
Y
(tín hiệu ra)
Hệ tự chỉnh cho đối tượng QGCP
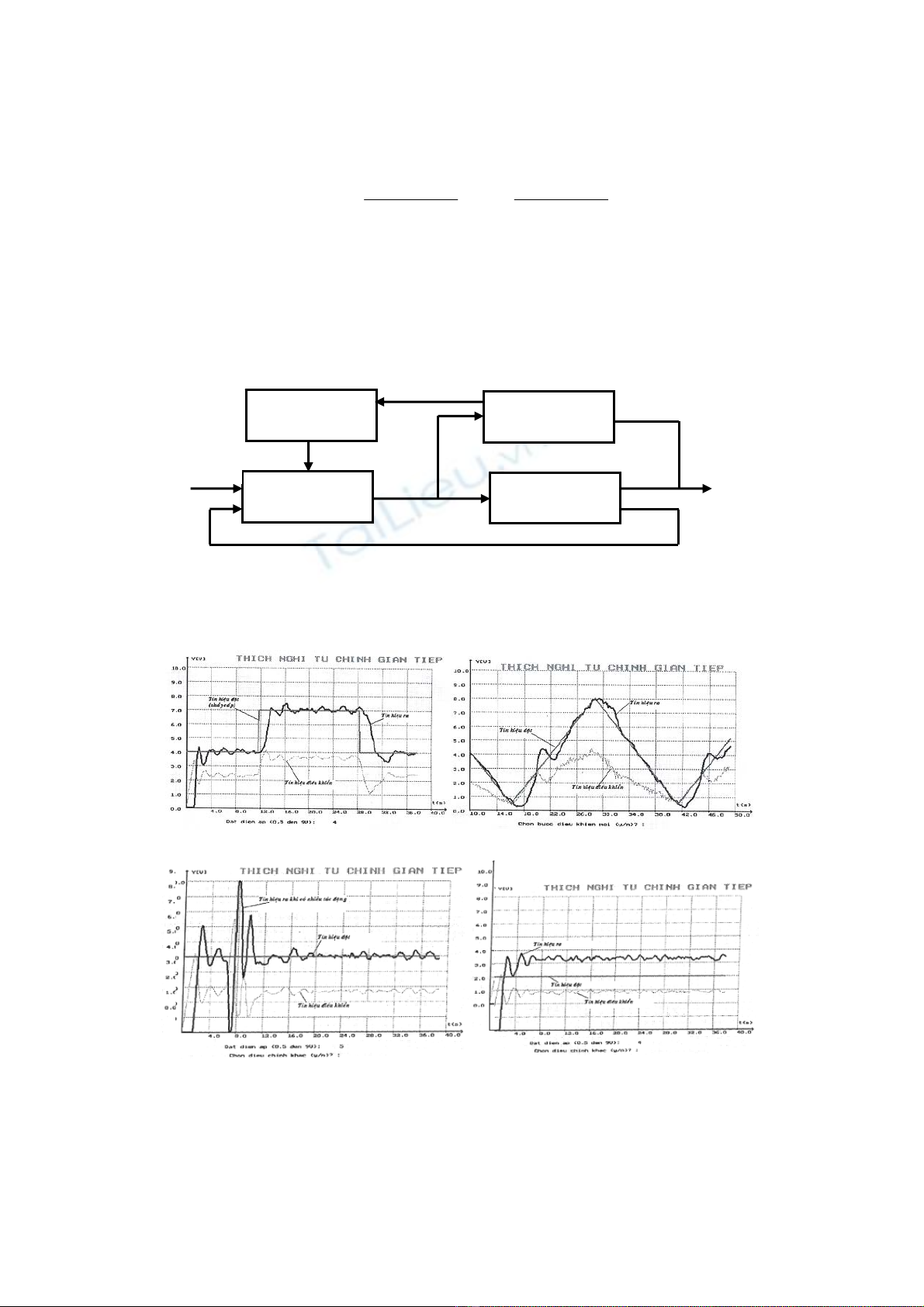
3. Kết quả thực nghiệm
Chương trình điều khiển được cài đặt bằng ngôn ngữ C
++ với CARD AD/DA 14 bit.
Chương trình chạy với bộ thích nghi tự chỉnh gián tiếp (luật điều khiển áp đặt cực với một bộ
đánh giá tham số theo phương pháp bình phương cựu tiểu truy hồi với hệ số quên λ)
ĐT
Đặc tính quá độ khi tín hiệu đặt nhảy cấp Đặc tính quá độ khi tín hiệu đặt biến đổi nhanh
Khi có nhiễu tác động vào hệ thống Tham số điều kiện đầu xa tham số hội tụ















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)