
56
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ NĂNG LƯỢNG - TRƯỜNG ĐẠI HỌC ĐIỆN LỰC
(ISSN: 1859 - 4557)
PHƯƠNG PHÁP KẾT HỢP TÍCH LŨY TƯƠNG QUAN VÀ LỌC SỐ ĐỂ TÁCH MỤC TIÊU RAĐA DI ĐỘNG
THE COMBINATION METHOD OF CORRELATION ACCUMULATION AND DIGITAL FILTERING FOR DETECTING MOVING
RADAR TARGETS
Trần Văn Nghĩa (1), Đặng Trung Hiếu (2), Trương Hữu Đông Hà (3), Nguyễn Văn Linh (3)
(1)
Học viện Phòng không-Không quân,
(2)
Trường Đại học Điện lực,
(3)
Viện Kỹ thuật Phòng không-Không quân
Ngàynhậnbài:24/06/2024,Ngàychấpnhậnđăng:25/07/2024,Phảnbiện:TS.LưuĐứcThọ
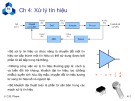
Tóm tắt:Trong bài báo này, trước tiên các tác giả nghiên cứu các phương pháp tách mục tiêu rađa di động truyền thống, sau đó, các tác giả đề xuất phương pháp kết hợp tích lũy tương quan và lọc số cho tín hiệu rađa có điều tần tuyến tính (Linear Frequency Modulation - LFM). Các kết quả thực hiện bằng công cụ System Generator và thử nghiệm trên FPGA cho thấy khả năng triển khai thực tế phương pháp đề xuất.Từ khóa: Hệ thống rađa điều chế tần số tuyến tính, tích lũy tương quan, bộ lọc số, bộ phát hiện mục tiêu rađa dịch chuyển.Abstract:In this paper, the authors rst investigate traditional methods for detecting moving radar targets, and then propose a approach which combines correlation accumulation and digital ltering for radar signals with linear frequency modulation (LFM). The implementation results via the System Generator tool and FPGA testing demonstrate the practical feasibility of the proposed method.Keywords: Linear frequency modulation radar system, correlation accumulation, digital lter, moving radar target detector.1. GIỚI THIỆU CHUNG
Ngày nay, các thiết bay không người lái UAV
(UnmannedAerialVehicle)vàcácthiếtbịbaycỡ
nhỏnhưFlyCamđượcứngdụngvàsửdụngrộng
rãitrênnhiềulĩnhvựcđờisốngxãhội,gópphần
tíchcựcvàosựpháttriểnxãhội.Tuynhiên,chúng
cũngđemđến nhiềumặttráikhi bị lợidụngđể
tiếnhànhmộtsốhoạtđộnggâynguyhạitớiquốc
phònganninh,antoànhàngkhôngvàtrậttựxã
hội.Dođó,việcpháthiệnUAV,FlyCamvàcác
vấnđềxửlýtínhiệuứngphóvớihoạtđộngcủa
chúnglàchủđềmangtínhcấpthiết.
Trongnhữngnămgầnđây,việcnghiêncứuvàthử
nghiệmcácthuậttoánxửlýtínhiệurađađiềutần
tuyếntínhLFMđangđượcquantâmmạnhmẽnhờ
vào khảnăngpháthiệnmụctiêuở cựlyxa hơn
đồngthờicũngcókhảnăngphânbiệtcaohơntheo
cựly[1]-[5].Trongsốđócónhiềuthuậttoánhiệu
quảđượctriểnkhaiứngdụngthựctiễntrongcácđài
rađahiệnđại.Đặcbiệt,nhờvàogiảiphápđềxuất
trong[5,6],máythurađacóthểphânbiệtđượccác
đốitượngbayđến2–3m(xemHình1),phùhợpcho
việcpháthiệncácthiếtbịbaykhôngngườiláiUAV
cỡnhỏvàFlyCam.
57
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ NĂNG LƯỢNG - TRƯỜNG ĐẠI HỌC ĐIỆN LỰC
(ISSN: 1859 - 4557)
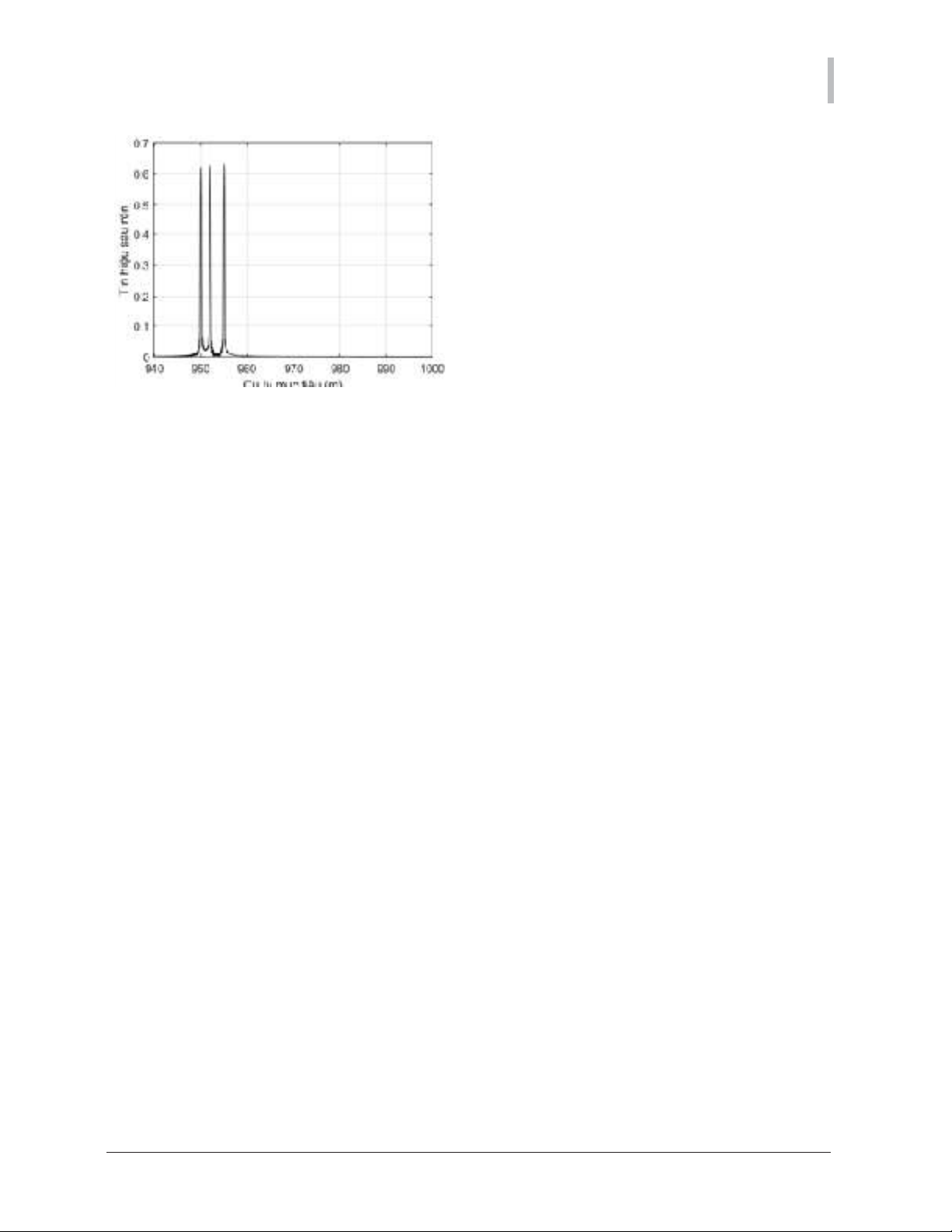
Hình 1. Tín hiệu thu rađa LFM phản xạ từ 3 mục tiêu sau nén xung [5]
Tuynhiên,cácUAVcỡnhỏvàFlyCamchủyếu
bayởđộcaothấp,dẫnđếntínhiệuthurađabao
gồmkhôngchỉtínhiệuphảnxạtừcácmụctiêu
cầnquantâm,màcòncáctínhiệutừđịavậtcố
địnhnhưmặtđất,câycối,đồinúihaycáccông
trình xây dựng, ...) và từ các đối tượng chuyển
độngchậm(vídụ,đámmâychuyểnđộngvớitốc
độgió,chimtrời,luồngkhíthảitừcácnhàmáy,
...).Tínhiệuphảnxạtrênđượcgọichunglànhiễu
tiêucựchaynhiễuđịavậtvàđôikhichúngche
lấpmụctiêuhiểnthịtrêncácmànhìnhhiệnsóng
chuyêndụnggâykhókhănchoviệcquansát,xửlý
tínhiệuvàđưaraquyếtđịnhcầnthiết.Chínhvìthế
yêucầuđặtralàcầnphảitáchđượcthôngtincủa
mụctiêuquantâmtừcácloạinhiễunày.
Cácmụctiêukhichuyểnđộngsẽtạoratrongtín
hiệuthumộtlượngtầnsốthayđổibởihiệuứng
Doppler[6,7].Địavậtcóchuyểnđộngtươngđối
bịgiớihạnsovớirađanêntồntạisựkhácbiệtvề
lượngtầnsốDopplergiữamụctiêuquantâmvới
địavậtkhôngmongmuốn.Cụthểlà,mậtđộphổ
côngsuấtcủatínhiệuthusẽtậptrungxungquanh
tầnsốDCf=0.Tuynhiên,đốivớicácrađacó
LFM,tínhiệuphátvàokhônggiancótầnsốthay
đổi,điềunàytươngđươngvớiviệctạorasựdịch
chuyểntươngđốigiữađàirađavàđịavật,đođó
gâykhókhănchoviệctáchtínhiệucủacácmục
tiêudiđộngtừđịavậtvớicácphươngpháptruyền
thống[6,7].
Bàibáotrìnhbàycácphươngphápsốtáchmục
tiêu rađa di động (TMTDĐ) và đề xuất phương
pháphiệuquảTMTDĐchorađasửdụngtínhiệu
bức xạcậnliên tục cóđiềutầntuyến tính, triển
khaithửnghiệmphươngphápđềxuấttrênFPGA.
Phươngphápđềxuấtcókhảnăngápdụngchocác
hệthốngrađaLFMhiệnđạingàynay,xửlýđược
vớitínhiệuphảnxạtừUAV,FlyCamkhicócác
phươngphápnénxungthíchhợp.
Cấutrúccácphầntiếptheocủabàibáobaogồm:
phần2phântíchmộtsốphươngphápsốtáchmục
tiêu rađa di động liên quan và đề xuất phương
pháptíchlũytươngquankếthợplọcsố,phần3
thửnghiệmphươngphápđềxuấttrênphầncứng
FPGAvàphần4đưarakếtluậncủabàibáo.
2. MỘT SỐ PHƯƠNG PHÁP SỐ TÁCH MỤC TIÊU RAĐA DI ĐỘNG VÀ PHƯƠNG PHÁP TÍCH LŨY TƯƠNG QUAN2.1. Các phương pháp số tách mục tiêu di động truyền thống
Các phương pháp số tách mục tiêu di động
(TMTDĐ)truyềnthốngcóthểchungquylạivề
mộthệthốngsốchunghoặcdướidạngbộlọcsố
đượcmôtảbằngphươngtrìnhhiệusố:
( )
0 1
( ) ( ) ( ) ( )
L M
i i
y n a i x n i b i y n i
= =
= − − −
∑ ∑
(1)
trongđóx(n)làtínhiệuđầuvàoởthờiđiểmthứn,
y(n)làtínhiệuđầuraởthờiđiểmthứn,a(i),b(i)
làcáchệsốtrọngsố,Llàbậccủabộlọc.
Khimộttrongcáchệsốb(i)≠0thì(1)sẽmôtảbộ
lọchồiquy(IIR),trongđó,tínhiệuđầurakhông
nhữngchỉphụthuộcvàotínhiệuđầuvàoởthời
điểmhiệntạivàcácthờiđiểmtrướcđómàcòn
58
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ NĂNG LƯỢNG - TRƯỜNG ĐẠI HỌC ĐIỆN LỰC
(ISSN: 1859 - 4557)
phụthuộcvàocảtínhiệuđầuraởcácthờiđiểm
trước.Khitấtcảcáchệsố b(i) =0thì(1)trởthành:
( )
0
( ) ( )
L
i
y n a i x n i
=
= −
∑
(2)
bộlọcnàygọilàbộlọckhônghồiquy(FIR),tín
hiệurachỉphụthuộcvàotínhiệuđầuvào.
Thựchiệnbộlọchồiquycầnsốkhâulọcíthơnso
vớithựchiệnbộlọckhônghồiquycóđặctuyến
tươngđươngvớinó.Tuynhiên,bộlọckhônghồi
quyluônổnđịnh,trongkhiđóbộlọchồiquysử
dụngphảnhồidễmấtổnđịnhvàsaisốtíchluỹ[1].
Cơsởđểtáchmụctiêudiđộnglàdựavàosựdịch
chuyểntầnsốDopplertrongtínhiệuthuđượcso
vớitầnsốsóngmang.DịchchuyểntầnsốDoppler
đượcxácđịnhbằngbiềuthức:
0
2 2
d
f f
c
ν ν
λ
= ± = ±
(3)
Trongđó,clàvậntốcánhsáng,vlàvậntốcmục
tiêu,f
0
vàλlàtầnsốvàbướcsóngtínhiệu.
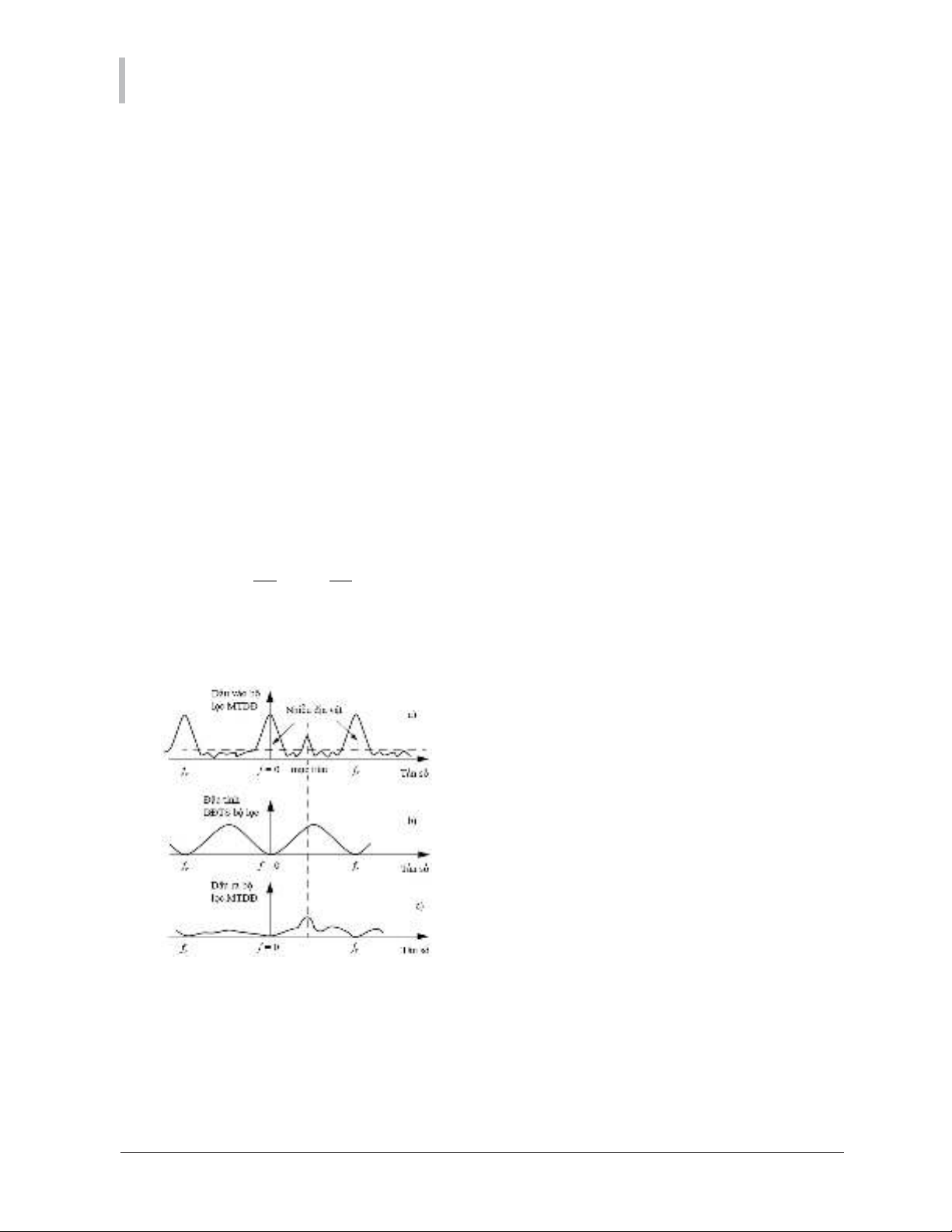
Hình 2. Quá trình lọc theo phương pháp trừ qua chu kỳ. (a) Phổ tín hiệu phản xạ; (b) Đặc tính biên độ tần số bộ lọc; (c) Phổ tín hiệu đầu ra bộ lọc
Cácloạinhiễucótầnsốthấp,quanhvùngtầnsố0
nêncácbộlọcđểTMTDĐcóđặctínhthôngdải
[1].MộtdạngcụthểbộlọcdùngđểTMTDĐcó
thểtìmthấytrongcácđàirađahiệnnaylàcácbộ
lọcsố/tươngtựtheophươngpháptrừquachukỳ
(Hình2)[8].
Cácbộlọcsốcũngcóthểthựchiệnhiệuquảbằng
biếnđổiFourierrờirạc(DFT)[1],[2].DFTthực
hiện biến đổi chuỗi N giá trị rời rạc x(n) trong
miềnthờigianthànhchuỗiX(k)trongmiềntầnsố.
1
2 /
0
( ) ( )
N
jnk N
n
X k x n e
π
−
−
=
=
∑
(4)
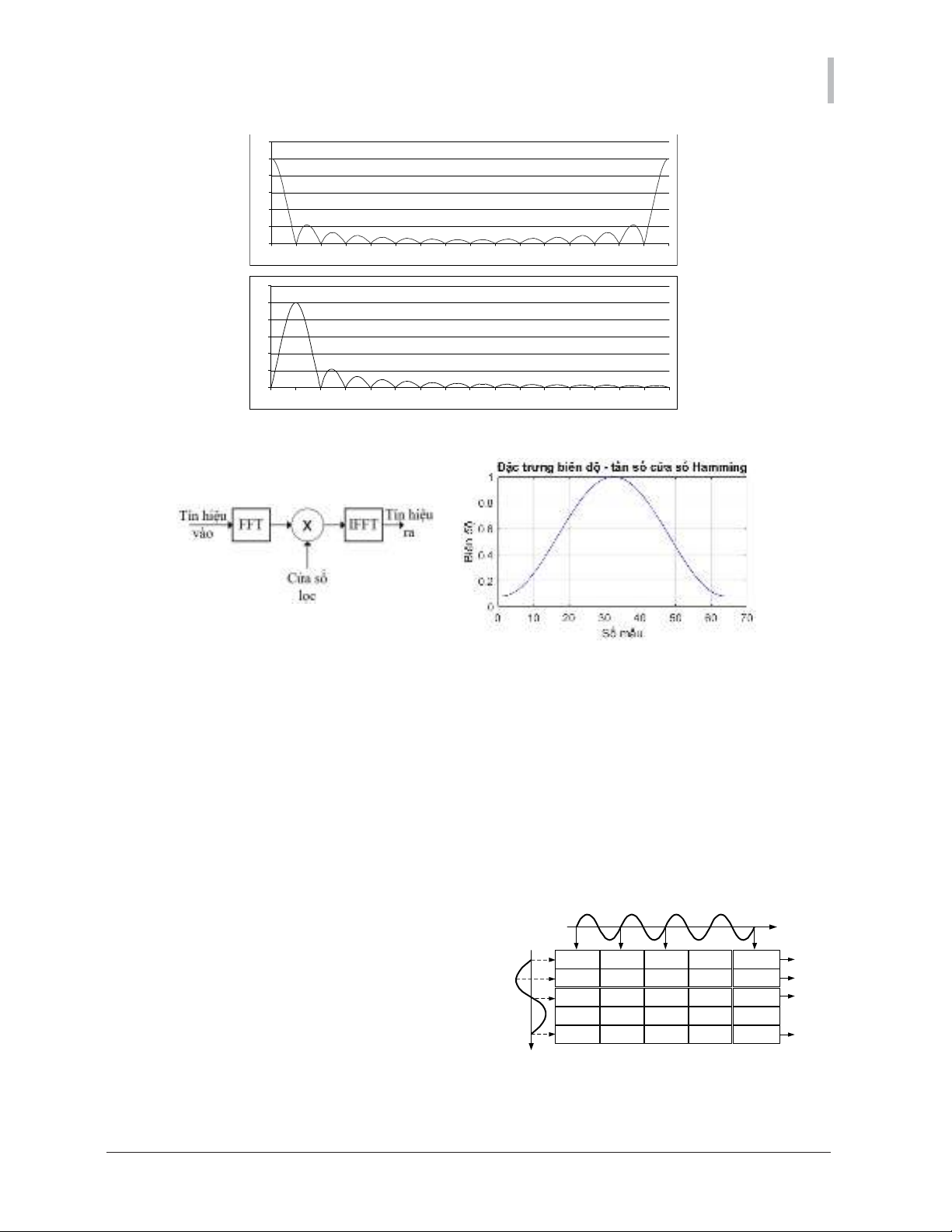
BảnchấtphépbiếnđổiDFTchínhlàthựchiệnN
bănglọcsốmắcsongsongkhônghồiquy(Hình
3).Bộlọcmụctiêudiđộngtheophươngpháplọc
sốbằngbiếnđổiFourierđượcchỉraởHình4cho
phépđiềuchỉnhđặctínhbiênđộtầnsốcủabộlọc
theoyêucầunhờhàmcửasổ.
2.2. Phương pháp tích lũy tương quan đề xuất cho tách mục tiêu di động
PhươngpháplọcsốdùngDFTcóưuđiểmthựchiện
đượcbộlọccóđặctuyếnbấtkỳ.Tuynhiên,nhược
điểmcủanólàsửdụngcặpDFT/IDFT làmtăng
đángkểđộphứctạptínhtoánvàtrễ.
Dựa trên tính đơn giản của phương pháp bù qua
chukỳ,bàibáođềxuấtphươngpháptíchlũytương
quankếthợpFFT.Quátrìnhtíchlũygồm64chukỳ
vàmỗichukỳlấymẫu512điểmđượcmôtảởHình
5vớicácbướcsau:
-Trongmỗimộtchukỳquétkhônggianrađa,các
mẫutínhiệuđượcghivàobộnhớtheochiềudọc;
-Trongcácchukỳquétkhônggianrađa,tínhiệu
đượcghivàobộnhớtheohàng;
-Quátrìnhđọcrađượcthựchiệntuầntựtheohàng
rồiđưasanglọcsốbằngcặpFFT/IFFT.
Nhưvậysauquátrìnhtíchlũytínhiệumụctiêu
sẽ có dạng dao động theo tần số Doppler còn
59
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ NĂNG LƯỢNG - TRƯỜNG ĐẠI HỌC ĐIỆN LỰC
(ISSN: 1859 - 4557)
nhiễu có giá trị gần như không đổi trong một
khung,vìthếkhithựchiệnphântíchphổbằng
phépbiếnđổiFFTthìphổcủamụctiêusẽbịlệch
khỏivạchphổtrungtâmmộtlượngbằngtầnsố
Dopplercònnhiễusẽcóphổtrùngvớivạchphổ
trungtâm.
Đểkiểmtrathuậttoáncủabộtíchlũy,giảthiếttín
hiệuphảnxạvềtừmụctiêubayraxađàivàtín
hiệuđịavật.Tínhiệuphảnxạvềtừmụctiêucó
phađượcxácđịnhnhưbiểuthức(5)(ápdụngcho
loạitínhiệubứcxạrađaphứctạpnhưtínhiệucận
liên tục, tín hiệucó điều tầntuyến tính,...nhưng
cũngphùhợpvớicảloạitínhiệurađađơnxung),
vớiR1làcựlybanđầucủamụctiêu,
/
B
µ τ
=
là
hệsốLFM,Blàđộditần,τlàđộrộngxung.Khi
đótầnsốtứcthờicủatínhiệuphảnxạđượcxác
địnhnhưbiểuthức(6).
Tínhiệuđịavậtcóthểđượctạoragiốngnhưđối
vớitrườnghợpmụctiêuđứngyên.Tổnghợptín
hiệuphảnxạtừmụctiêuvàcácdạngnhiễusau
nénxung(thườngnénxungbằngbộlọcphốihợp)
đượcđưavàobộtínhlũytươngquan.
t
t
0*64+0
1*64+0
2*64+0
...
511*64+0
0*64+1
1*64+1
2*64+
1
...
511*64+1
0*64+2
1*64+2
2*64+2
...
511*64+2
...
...
...
...
...
0*64+63
1*64+63
2*64+63
...
511*64+63
Quátrìnhghigiữacácchukỳ
BộnhớRAM
Quátrìnhđọc
Quátrìnhghitrongchukỳ
Hình 5. Quá trình ghi và đọc của bộ tích lũy tương quan
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4 5 6 7 89 10 11 12 13 14 15 16
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4 5 6 7 89 10 11 12 13 14 15 16
Hình 3. Đặc tuyến biên độ tần số các băng lọc (số 0 phía trên, số 1 phía dưới) của DFT
Hình 4. Bộ lọc số dùng FFT và đặc tuyến biên độ tần số hàm cửa sổ Hamming
60
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ NĂNG LƯỢNG - TRƯỜNG ĐẠI HỌC ĐIỆN LỰC
(ISSN: 1859 - 4557)
2
1 1
0
2 22 2
( ) 2 , 0
2
R R
t f t t t t
c c c c
= − + + − +
(5)
( ) ( )
1
0
1 1
0
21 2
2
2 22
i
d
Rd
f t t f t
dt c c
R RB
f t f t
c c c
= = − + −
− + − = − + −
(6)
3. THỬ NGHIỆM TRÊN PHẦN CỨNG FPGA
Đểđánhgiáthiếtkếtrênphầncứng,trongcácthử
nghiệmđãsửdụng3bomạchpháttriển:Xilinx
Kintex-7 FPGA KC705 EvaluationKit, Analog-
to-Digital Converter (ADC) board TSW1400
và Digital to Analog Converter (DAC) board
DAC34SH84EVM(Hình6).
Tínhiệuđầuvàobộtích lũy gồm tín hiệuphản
xạtừmụctiêuvàđịavậtsaunénxungbằnglọc
phối hợp được phát từ FPGA qua DAC rồi đưa
vàoADC. Các thamsốđược thiếtlậptrong thử
nghiệm:TầnsốDopplerf
d
=1/8f
L
,vớif
L
làtầnsố
lặplạicủatínhiệu.Thờigiangiữchậmphảnxạ
1
muctieu
s
τ µ
=
,
3 .
diavat
s
τ µ
=
Hình 6. Thiết lập phần cứng thử nghiệm
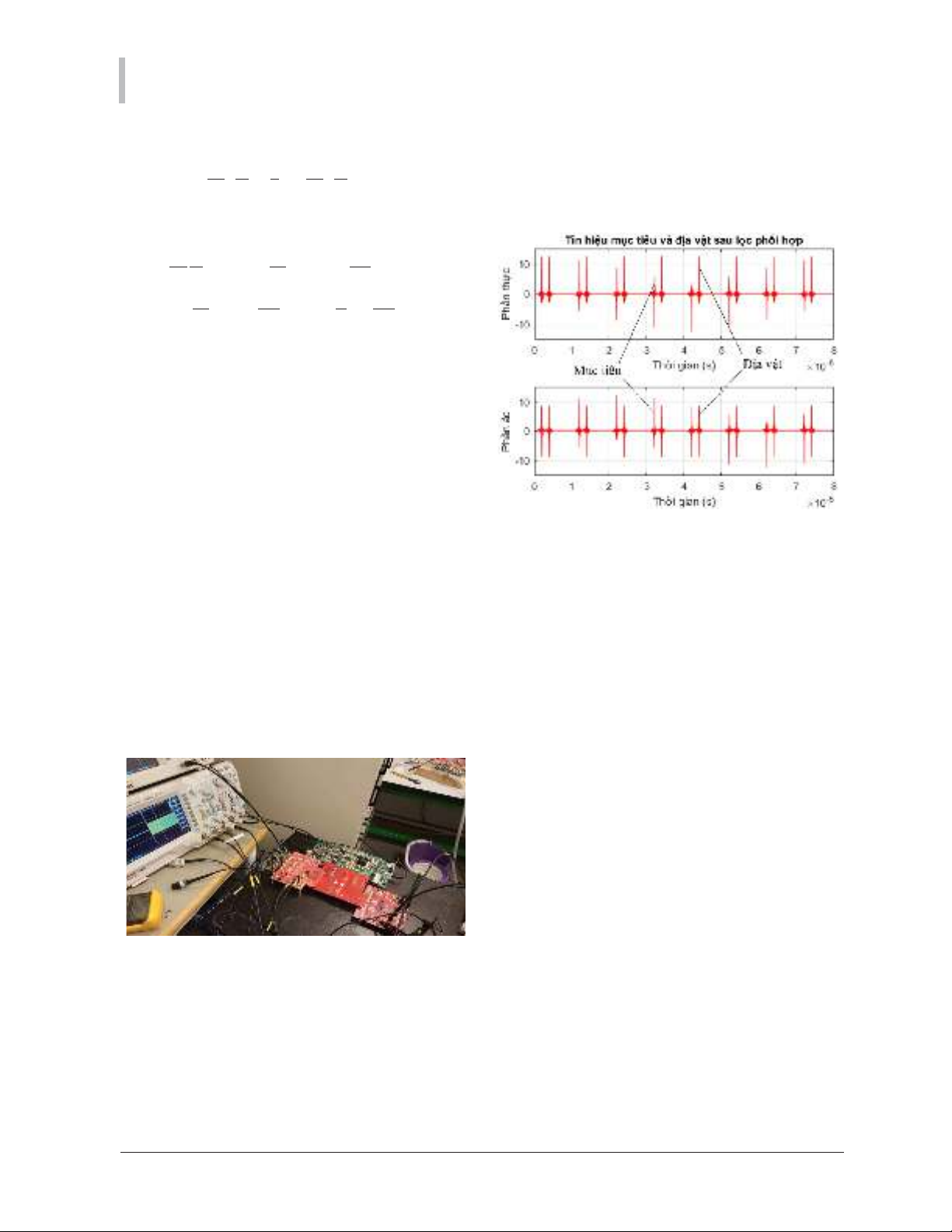
ThựchiệnmôphỏngtrênMatlab,tínhiệutạogiả
mụctiêudiđộngvàđịavậtsaukhiquabộlọcphối
hợpthểhiệnnhưHình7.Ta thấy rằng,tín hiệu
phảnxạtừmụctiêusauquabộlọcphối hợplà
xungnénxuấthiệntrướcđịavật(nghĩalàmụctiêu
nằmgầnđàirađahơn)vàcóbiênđộthayđổivới
lượngtầnsốDoppler,còntínhiệuphảnxạtừđịa
vậtcóbiênđộgầnnhưkhôngđổi.
Hình 7. Tín hiệu mục tiêu và địa vật sau khi lọc bằng bộ lọc phối hợp
Tínhiệusaunénxungbằnglọcphốihợpsẽđược
tíchlũytươngquanvàphântíchphổ.Kếtquảkiểm
tra trên System Generator trên Hình 8 cho thấy
tín hiệutrướctích lũy tươngứng vớimô phỏng
MatlabtrênHình7,trongđó,tínhiệuphảnxạvề
baogồmtínhiệucủamụctiêucógiátrịthayđổi
vàcủađịavậtítthayđổi.Sautíchlũy,tínhiệucủa
mụctiêuvàcủanhiễuđịavậtđượctáchbiệttại
cácvịtríthờigiantươngứngvớicựlycủachúng.
Hình9làđoạntínhiệumởrộngởhaivịtrítương
ứngvớimụctiêuvànhiễuđịavật.TừHình9có
thểthấy,tínhiệucủamụctiêutạicáckhungtích
lũy 64 điểmdao động theo tần số Doppler(bên
trái)còntínhiệuđịavậtgầnnhưkhôngđổi(bên
phải),điềuđóchothấysauquátrìnhtíchlũytương
quanthìtínhiệuphảnxạtừmụctiêudiđộngvà
từđịavậtkhácnhaurõrệthơntạocơsởtănghiệu
quảcholọcsốTMTDĐ.
Hình10biểudiễnphổcủatínhiệuphảnxạđược
mở rộng tại hai thời điểm tương ứng thu được









![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)













