Tuyển tập Hội nghị Khoa học thường niên năm 2023. ISBN: 978-604-82-7522-8
42
PHƯƠNG PHÁP TÍCH HỢP CƠ SỞ TRI THỨC XÁC SUẤT
DỰA TRÊN LÝ THUYẾT DEMSPTER-SHAPER
Nguyễn Văn Thẩm
Trường Đại học Thủy lợi, email: thamnv@tlu.edu.vn
1. GIỚI THIỆU CHUNG
Với sự phát triển của công nghệ máy tính,
Internet và các lĩnh vực liên quan khác, công
nghệ tổng hợp thông tin đã và đang phát triển
vượt bậc. Việc thực hiện hợp nhất thông tin
cần phải xử lý rất nhiều thông tin không chắc
chắn. Các công cụ lý thuyết hiện có để xử lý
thông tin không chắc chắn bao gồm lý thuyết
xác suất, lý thuyết tập mờ, lý thuyết bằng
chứng Dempster-Shafer, lý thuyết entropy
thông tin. Lý thuyết Dempster-Shafer là một
công cụ điển hình và được sử dụng rộng rãi
để xử lý thông tin không chắc chắn và hợp
nhất dữ liệu, và nó được sử dụng rộng rãi
trong các lĩnh vực khác nhau.
Bài báo đề xuất một mô hình tích hợp cơ sở
tri thức (CSTT) xác suất bằng cách kết hợp lý
thuyết xác suất và một số luật hợp nhất được
phát triển từ lý thuyết Demspter-Shaper.
2. NỘI DUNG
2.1. Một số khái niệm
Đặt
1
E, ,E
n
là một tập hợp các sự
kiện được biểu thị trong không gian mẫu .
Với F, G , đặt FG là giao của F và G, F
là phủ định của F. Let 12
ΘEE
ˆˆ ˆ
E
n là hội
đầy đủ của
với
iE
ˆ
E,Eii
. Đặt h=2n và
1
ΓΘ,,Θ
h
là tập các hội đầy đủ của
và 12 n
E E …E =. Hội đầy đủ thỏa mãn U, kí
hiệu ΘU, nếu U xuất hiện dương trong Θ.
Định nghĩa 1. [1] Hàm
0,1
:Γ m
được gọi là phép gán xác suất cơ bản (Basic
probability assignment-BPA) nếu thỏa mãn
các tính chất sau:
(i)
0
m
(ii)
1
m
Hàm
0,1
:Γ được gọi là độ đo
xác suất của
trên
Γ nếu:
ΕΘ
ΘΕ
m
Định nghĩa 2. [2] Đặt F, G and
0,1
. Một ràng buộc xác suất (RBXS) là
một biểu thức có dạng
,
c trong đó
|cFG.
Định nghĩa 3. [2] Một cơ sở tri thức
(CSTT) xác suất là một tập hữu hạn các
RBXS:
1,,
n
trong đó,
1,
iii
cin
Định nghĩa 4. [2] Một hồ sơ TTXS
trên tập các sự kiện
là một bộ , ,
trong đó
là một tập hữu hạn gồm n sự
kiện và là một đa tập hữu hạn gồm h
CSTT xác suất.
Định nghĩa 5. [2] Một hồ sơ TTXS
,
là hồ sơ TTXS nhất quán nếu và
chỉ nếu
: nhất quán.
Đặt
,
U=1 nếu ΘU, ngược lại
,
U=0. Đặt
ij
nh
Aa
là ma trận đặc
trưng của CSTT xác suất , trong đó
ij ,1 ,
ii j i ii j i
aFG FG .
Định lý 1. [2] Cho CSTT xác suất . Một
BPA của tương ứng với lời giải tối ưu *
của bài toán tối ưu:
(,) 1
ainrg m
hn
n
i
Ri
Tuyển tập Hội nghị Khoa học thường niên năm 2023. ISBN: 978-604-82-7522-8
43
với các ràng buộc:
0, 0
AA
1
1, 0, 0
h
i
i
Định lý 2. [2] Đặt F, G . Hàm
0,1
:Γ thỏa mãn các luật xác suất:
(P0)
ΘΓ ,ΘF
Θ
F
(P1)
ΘΓ ,ΘFG
Θ
FG
(P2)
FG G F G
2.2. Một số luật hợp nhất
Định nghĩa 6. [1,3] Đặt 1
m và 2
m là hai
BPA, luật Dempster (Dempster Rule) DSR
được định nghĩa như sau:
i
0NÕu
Ng−îc ¹
1 l
m
trong đó,
12
ij
ij
mm ,1,ij h
12
ij
ij
mm ,1,ij h
Định nghĩa 7. [1,3] Đặt 1
m và 2
m là hai
BPA, luật hợp tổng quát (Generalized
Combination Rule) GCR được định nghĩa
như sau:
12 NÕu
1
Ng−îc l
¹
1 i
mm
mm
trong đó,
1 m
12 1
ij
ij
mm
12
ij
ij
mm và
12
ij
ij
mm ,1,ij h
Định nghĩa 8. [1] Đặt 1
m và 2
m là hai
BPA, luật hội chuyển TCR (Transferable
Conjunctive Rule) được định nghĩa như sau:
12
ij
ij
mmm
trong đó
0NÕu
N1
g−îc
i
1l¹ ,2
i
i
i
m
m
i
m
2.3. Mô hình đề xuất
Bài toán tích hợp các CSTT xác suất dựa
trên khoảng cách được định nghĩa:
(1) Đầu vào: Một hồ sơ CSTT xác suất.
(2) Đầu ra: Một CSTT xác suất.
(3) Phạm vi bài toán: CSTT được biểu
diễn bằng ràng buộc xác suất.
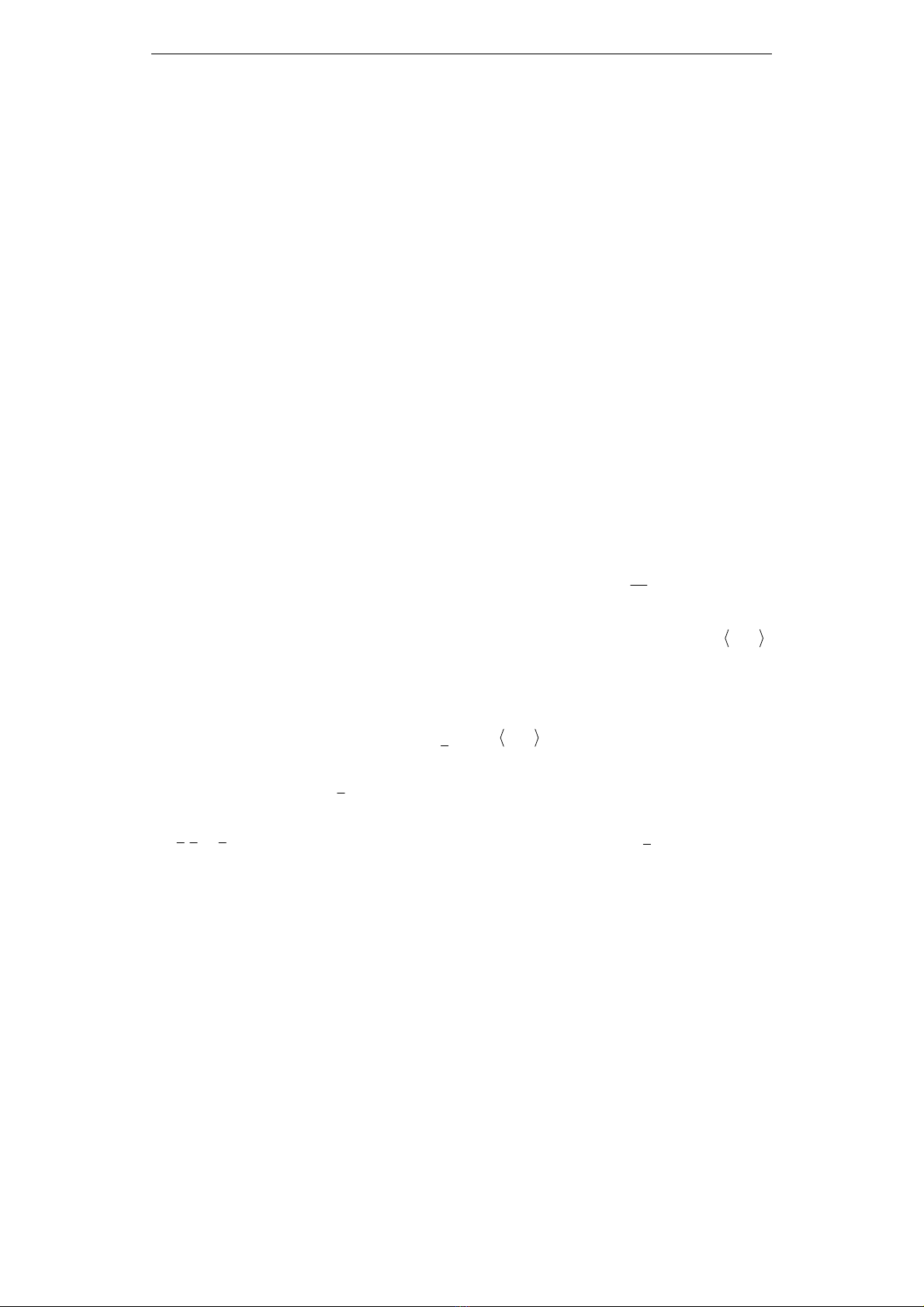
(4) Tiến trình tích hợp:
- Bước 1: Tìm các BPA của mỗi CSTT
i
trong hồ sơ CSTT xác suất theo Định
lý 1.
- Bước 2: Hợp nhất các BPA theo các
Định nghĩa 6, 7, 8.
- Bước 3: Tìm xác suất mới sau tiến trình
tích hợp theo Định lý 2.
Mô hình tổng quát tích hợp các CSTT khả
năng được minh họa như Hình 1.
Hình 1. Mô hình tích hợp CSTT xác suất
2.3. Ví dụ tính toán và thảo luận
Vietnam Airlines thực hiện một cuộc khảo
sát về các chuyến bay bằng cách lấy ý kiến
của khách hàng, tiếp viên và phi công (gọi
chung là các chuyên gia). Họ được yêu cầu
đưa ra một số nhận định (tri thức) về: Tỷ lệ
để một chuyến bay theo lịch trình khởi hành
đúng giờ (D), tỷ lệ một chuyến bay đến đúng
giờ (A); và tỷ lệ một chuyến bay đến đúng
giờ khi khởi hành đúng giờ là (A|D).
Tuyển tập Hội nghị Khoa học thường niên năm 2023. ISBN: 978-604-82-7522-8
44
Từ kết quả của các chuyên gia cung cấp, ta
thu được hồ sơ CSTT xác suất gồm hai cơ sở
tri thức 1
và 2
được thể hiện trong Bảng 2
cùng với giá trị xác suất mong đợi (MĐ) của
mỗi RBXS trong CSTT xác suất sau tiến
trình tích hợp.
Bước 1: Tìm các BPA của 1
và 2
. Theo
Định lý 1,
1234
,,,
,
123
,,
.
1
00 11
0.4 0.6 0.4 0.6
0.5 0.5 0 0
A
BPA của 1
tương lời giải tối ưu *
của
bài toán tối ưu:
43 123
(,)
amrg in
R
với các ràng buộc:
11
0, 0, 0 1,3
i
AA i
1234
1, 0 1, 4
ii
Kết quả được thể hiện trong Bảng 1.
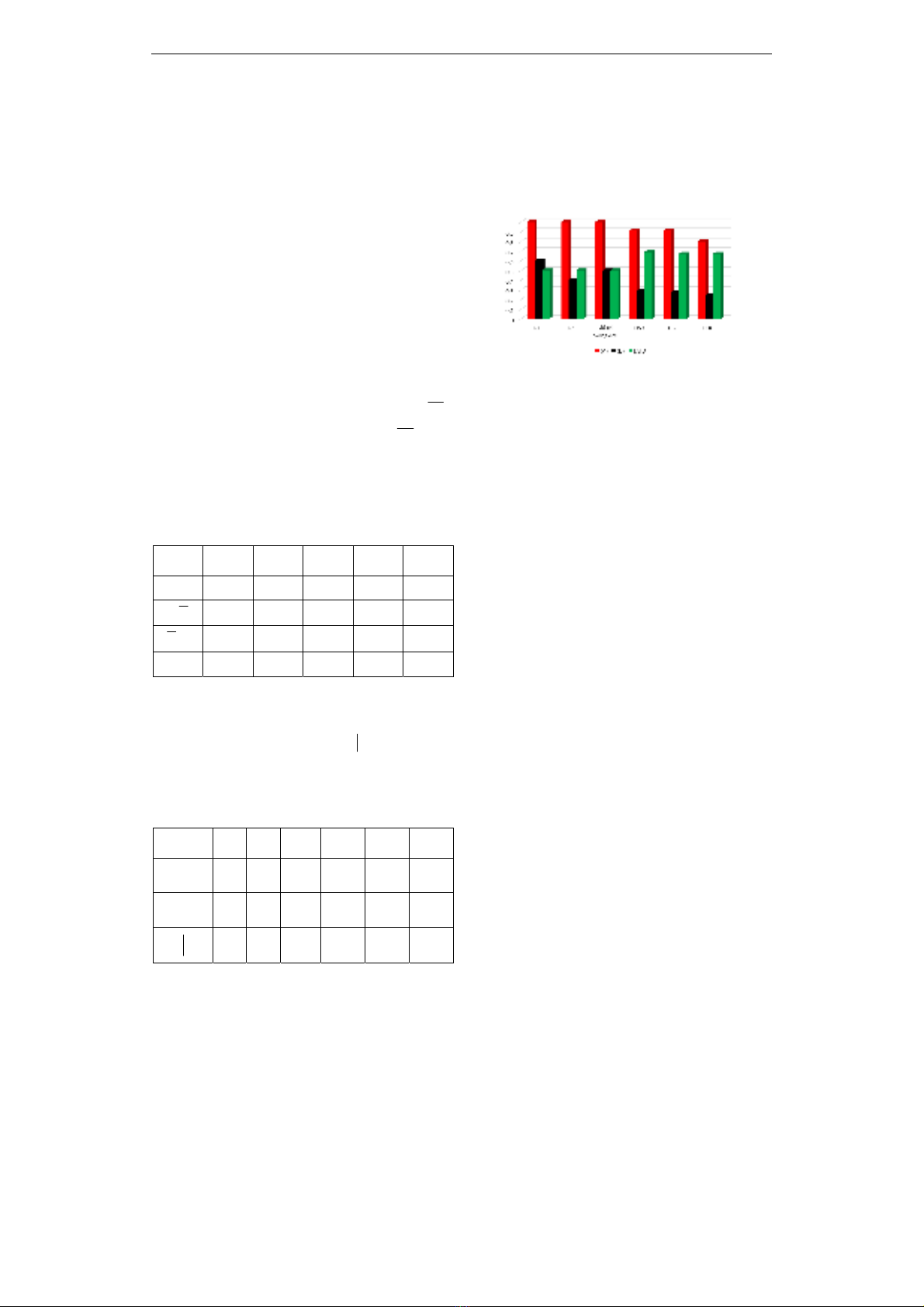
Bước 2: Hợp nhất các BPA theo các Định
nghĩa 6, 7, 8. Kết quả thể hiện trong Bảng 1.
Bảng 1. Các các BPA của 1
và 2
i 1
m 2
m DSR GSR TCR
AD 0.4 0.4 0.20 0.18 0.16
AD 0.4 0.6 0.71 0.73 0.64
AD 0.2 0 0.09 0.09 0.08
0 0 0.00 0.00 0.12
Bước 3: Tìm xác suất mới. Xét luật DSR,
theo luật (P0),
A
= 0.91,
D0.29.
Theo luật (P1) và (P2),
AD0.69. Kết
quả thể hiện trong Bảng 2.
Bảng 2. CSTT xác suất trước
và sau tiến trình tích hợp
i
c 1
2
MD DSR GSR TCR
A 1.0 1.0 1.0 0.91 0.91 0.80
D 0.6 0.4 0.5 0.29 0.27 0.24
AD 0.5 0.5 0.5 0.69 0.67 0.67
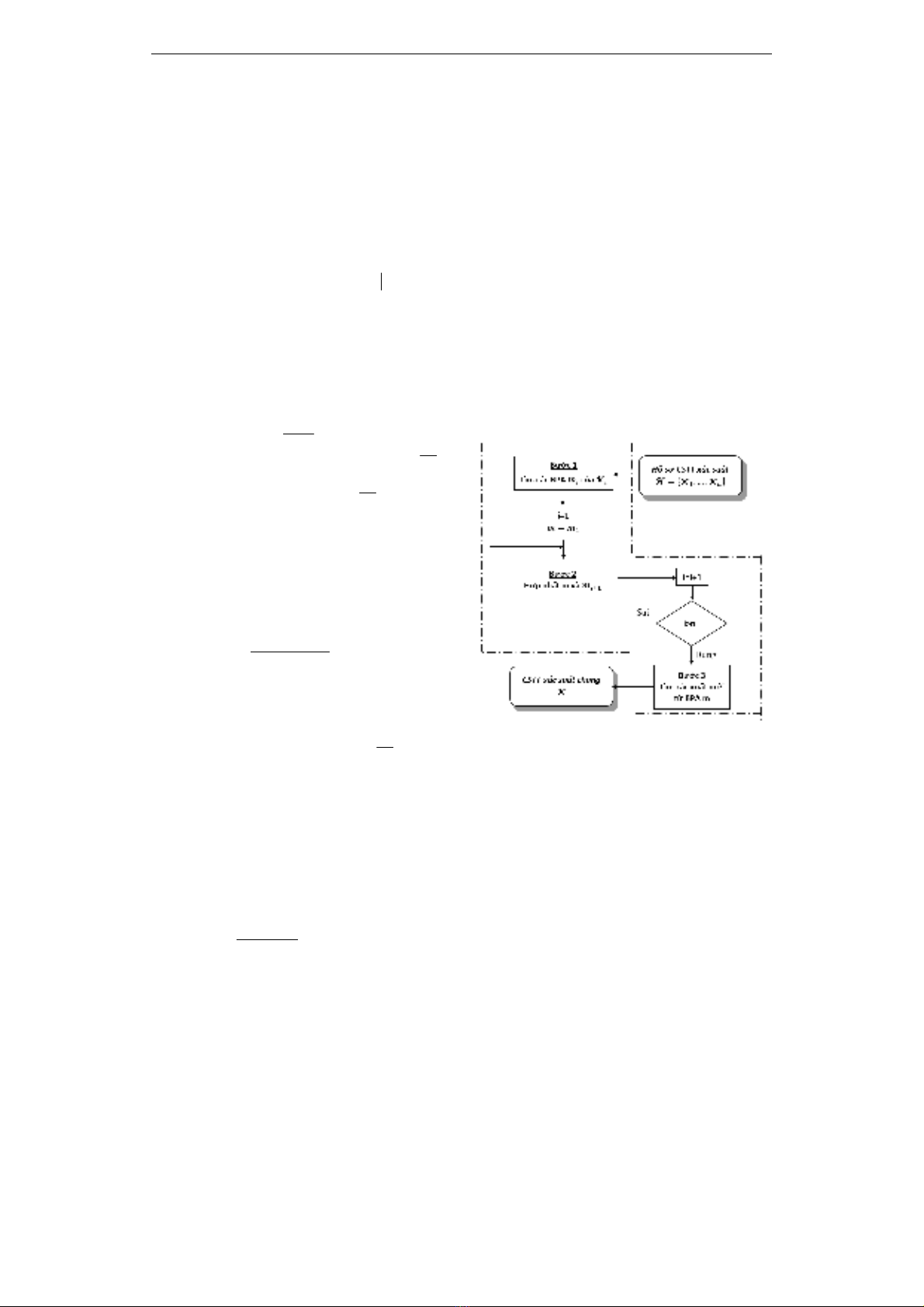
Hình 2 thể hiện kết quả thu được sau tiến
trình tích hợp CSTT xác suất và cho thấy khi
áp dụng các luật hợp nhất thì giá trị xác xuất
của các RBXS (A) và (A|D) kết quả có giá trị
gần với kết quả mong muốn. Tuy nhiên, giá
trị xác suất của ràng buộc (D) có độ lệnh cao
so với giá trị mong đợi.
Hình 2. So sánh các kết quả tích hợp
3. KẾT LUẬN
Trong bài báo này, tôi đã đề xuất một mô
hình tích hợp các CSTT xác suất bằng cách
sử dụng ba luật hợp nhất được phát triển từ lý
thuyết Demspter-Shaper (luật DSR, luật GSR
và luật TCR) để hợp nhất các BPA của các
CSTT xác suất đầu vào. Từ BPA thu được,
tôi sử dụng các luật xác suất để thu được
CSTT xác suất kết quả được biểu diễn bằng
các RBXS. Tuy nhiên, bài báo mới tập trung
ở khía cạnh lý thuyết mà chưa xem xét bài
toán dưới góc độ thực hành. Do đó, tôi sẽ
xem xét bài toán tích hợp trên bộ dữ liệu thực
tế để kiểm thử các kết quả đề xuất.
4. TÀI LIỆU THAM KHẢO
[1] Gan, Dingyi & Yang, Bin & Tang,
Yongchuan. 2020. An Extended Base Belief
Function in Dempster–Shafer Evidence
Theory and Its Application in Conflict Data
Fusion. Mathematics.
[2] Van Tham Nguyen và công sự. 2021.
A model for building probabilistic
knowledge-based systems using divergence
distances. Journal of Expert Systems with
Applications. Elsevier.
[3] Zhang, J., Deng, Y. 2017. A method to
determine basic probability assignment in the
open world and its application in data fusion
and classification. Appl Intell 46, 934-951.















![Bài tập Đại số tuyến tính [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/dkieu2177@gmail.com/135x160/79831759288818.jpg)








