
1
(112)
ỨNG DỤNG ĐỊNH VỊ TOÀN CẦU GPS
TRONG XÂY DỰNG ĐƯỜNG SẮT TỐC
ĐỘ CAO BẮC NAM
PGS.TS Phạm Văn Chuyên
Trường Đại học Xây dựng Hà Nội.
1.Đặt vấn đề.
Đừơng sắt tốc độ cao bắc nam là một công trình hiện đại ,qui mô lớn, dài 1541 km, điểm đầu
tại ga Ngọc hồi (Hà nội) , điểm cuối ga Thủ thiêm (thành phố Hồ chí Minh), đi qua 20 tỉnh thành ,có 23 ga
khách , 5 ga hàng , đường sắt đôi, khổ 1435 mm, điện khí hoá, tảỉ trọng 22,5 tấn/trục,tốc độ thiết kế
350 km/giờ, chạy trên ray, có khoảng 60 % là cầu cạn ,10 % là hầm , 30 % là nền đất. Để xác định vị trí ,
hình dạng , kích thước công trình này cần phải ứng dụng kỹ thuật đo đạc trắc địa tiên tiến của thế kỷ 21
là công nghệ định vị toàn cầu GPS.
2, Ưu điểm của công nghệ định vị toàn cầu GPS.
Định vị toàn cầu GPS là đặt máy tại một điểm trên mặt đất đo ngắm đến các vệ tinh bay trên bầu
trời để xác định ra tọa độ không gian của điểm đang đặt máy đó .
Định vị toàn cầu GPS (Global Positioning System) là công nghệ đo đạc trắc địa hiện đại và tiên
tiến của thế kỷ 21,có những ưu điểmvượt trội sau:
1/Cho phép định vị điểm thống nhất trong toàn cầu.
2/Cho phép định vị điểm tại bất kỳ nơi nào trên Trái đất.
3/Cho phép định vị điểm vào bất kỳ lúc nào trong suốt 24h của ngày đêm.
4/Cho phép định vị điểm trong mọi thời tiết (nắng, mưa, gió, bão…).
5/Cho phép định vị điểm mục tiêu tĩnh và điểm mục tiêu di động(đặt trên các phương tiện giao
thông như ô tô, tàu thủy, máy bay…).
6/Giữa các điểm đo không cần thông hướng như trong đo đạc trắc địa truyền thống.
7/Độ chính xác định vị cao.
8/Ứng dụng nhiều công nghệ điện tử và công nghệ thông tin làm cho việc đo đạc đạt trình độ tự
động hóa cao,tạo ra năng suất lao động cao.
9/Không đắt tiền.
2
10/Kỹ thuật định vị toàn cầu GPS được ứng dụng rất rộng rãi trong nhiều lĩnh vực khác nhau: trắc
địa, bản đồ, xây dựng, giao thông vận tải, quốc phòng, an ninh tình báo, địa chất, địa lý, hải dương học,
thám hiểm không gian, quản trị thông tin, lâm nghiệp, nông nghiệp, du lịch,…
11/Định vị toàn cầu GPS cho phép xác định tọa độ các điểm thuộc Trái đất rất thuận tiện và chính
xác cao , đáp ứng mọi yêu cầu đòi hỏi của thực tiễn .Bởi vậy , trong ngành xây dựng định vị toàn cầu GPS
được ứng dụng rất nhiều trong tất cả các giai đoan khảo sát , thiết kế , thi công và sử dụng công trình .
3. Nguyên lý đo trong định vị toàn cầu GPS.
Để định vị một vật đang vận động trong vũ trụ cần phải có bốn yếu tố về không gian và thời gian
(X,Y,Z,T). Do đó, nguyên tắc đo GPS là ở mỗi địa điểm và vào một thời điểm nhất định phải đo ngắm
được đến bốn vệ tinh,để xác định được bốn khoảng cách từ máy thu GPS đến bốn vệ tinhtương ứng ,từ đó
lập được bốn mô hình toán học,suy ra bốn phương trình, giải ra bốn ẩn số (X,Y,Z,T).
4. Dụng cụ đo trong định vị toàn cầu GPS.
Dụng cụ đo trong định vị toàn cầu GPS gồm có hai bộ phận:
1/Bộ phận thứ nhấtlà các máy đo GPS gồm có phần cứng và phần mềm.
2/ Bộ phận thứ hai là các vệ tinh nhân tạo bay trên bầu trời quanh Trái đất, chúng hoạt động
theo sự chỉ huy của con người thông qua các trạm điều khiển tại mặt đất.
Ở đây máy đo GPS đóng vai trò như máy toàn đạc (chủ thể đo thứ nhất ), còn vệ tinh nhân tạo bay
trên bầu trời đóng vai trò như mia (chủ thể đo thứ hai ) trong đo đạc trắc địa truyền thống.
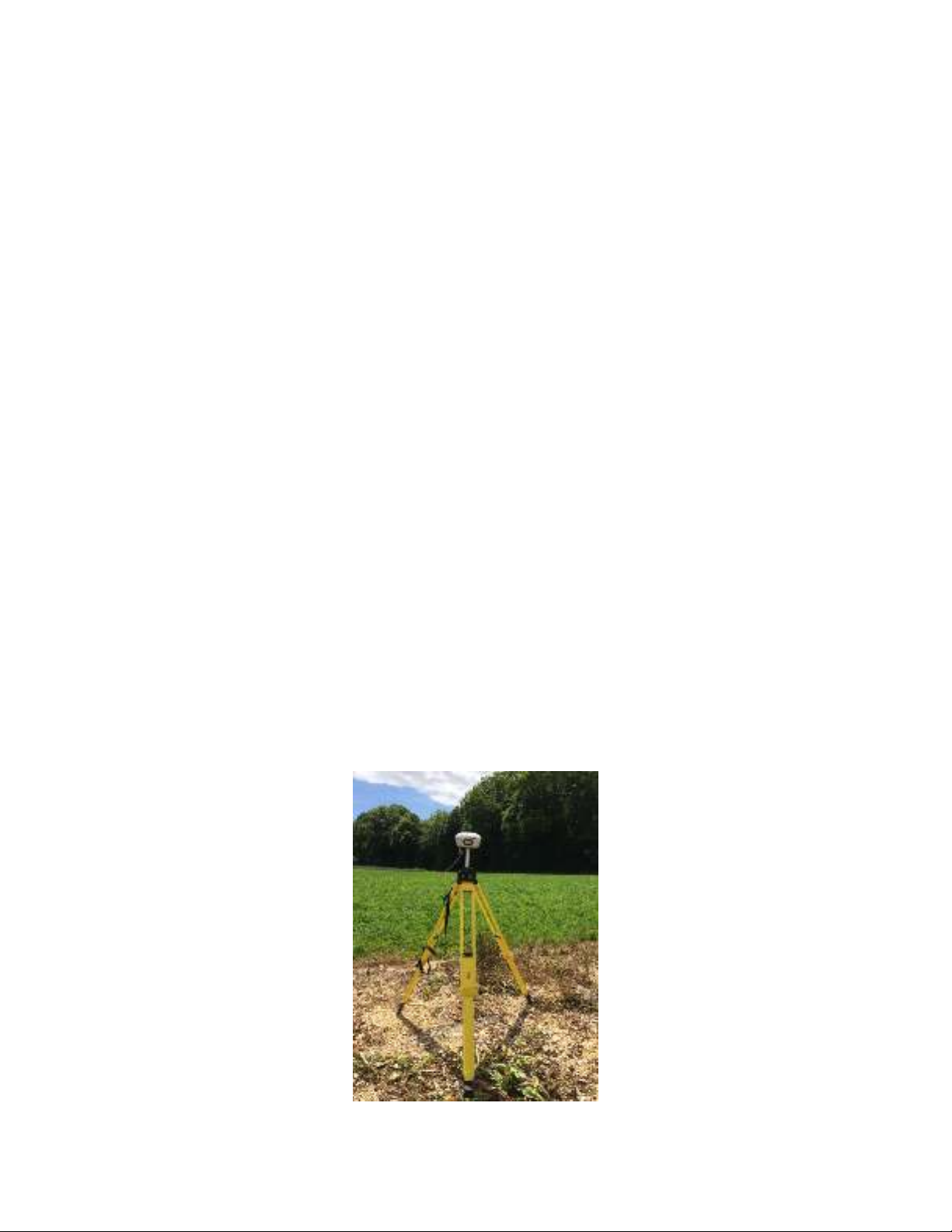
5. Máy định vị toàn cầu GPS.
Máy định vị toàn cầu GPS (hình 1) gồm có hai phần là phần cứng và phần mềm.
1) Phần cứng:
Gồm có ăngten và bộ tiến khuếch đại, nguồn tần số vô tuyến (RF), bộ vi xử lý, đầu thu, bộ điều
khiển, màn hiển thị, thiết bị ghi, nguồn năng lượng.
3
Hình 1.
2) Phần mềm:
Gồm có những chương trình tính dùng để xử lý dữ liệu cụ thể, chuyển đổi những kết quả đo thành
những thông tin định vị hoặc dẫn đường đi cho các phương tiện chuyển động.
Các máy đo GPS (máy thu GPS) sẽ thu và theo dõi các mã hoặc pha của các sóng mang (hoặc cả
hai), đồng thời tiếp nhận các thông điệp phát tín. Bằng cách so hàng tín hiệu đến từ vệ tinh với bản sao của
mã phát được ghi trong máy thu, người ta có thể xác định được cự ly đến vệ tinh (khoảng cách từ máy đo
GPS đến vệ tinh). Nếu các cự ly đến bốn vệ tinh được liên kết với các thông số quỹ đạo thì máy thu có thể
xác định được ba giá trị tọa độ địa tâm của điểm (XA, YA, ZA). Cự ly thứ tư để tính toán hiệu chỉnh đồng hồ
trên máy thu (T).
6. Hệ thống định vị toàn cầu GPS của Mỹ.
Hệ thống định vị toàn cầu GPScủa Mỹ gồm có hai phần là phần vũ trụ và phần điều khiển.
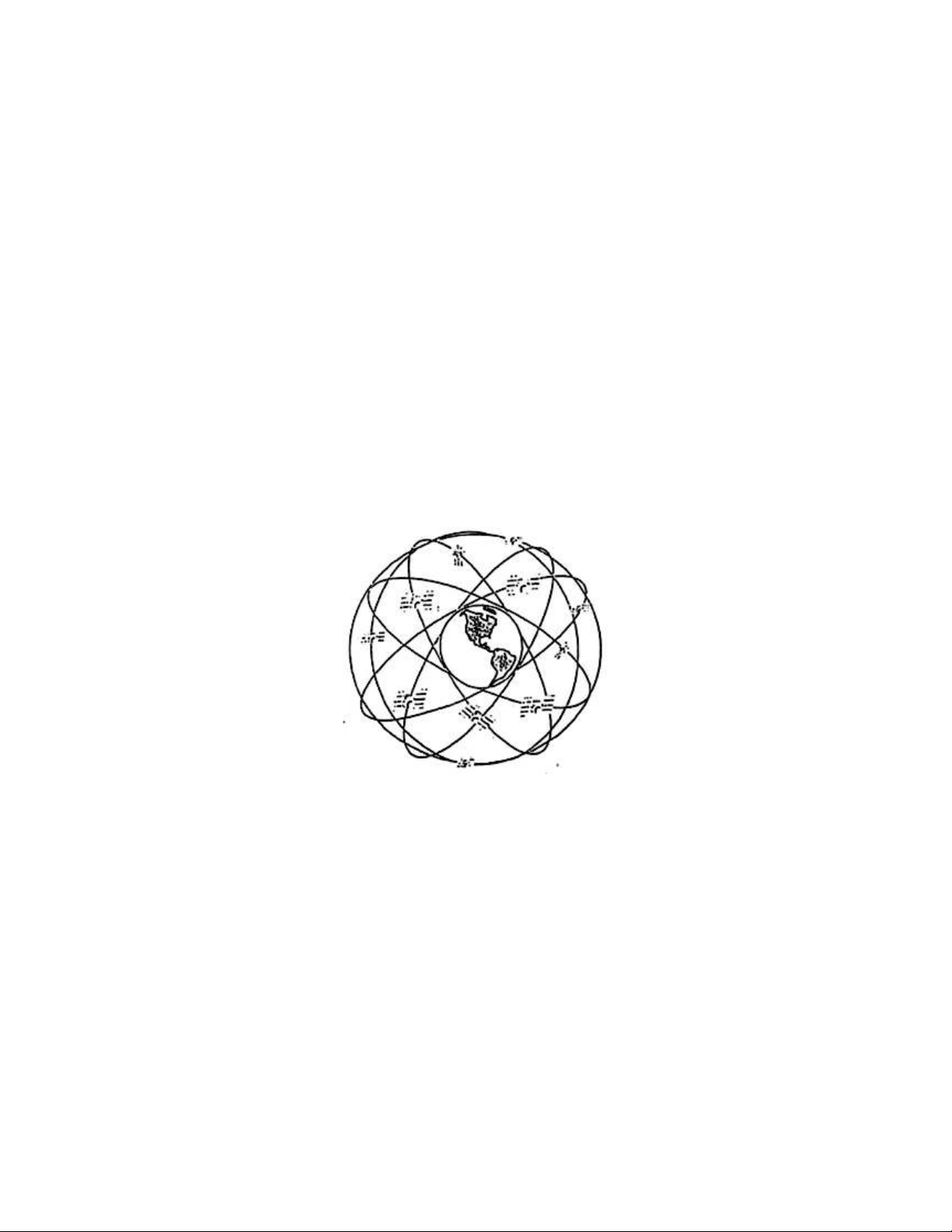
1) Phần vũ trụ:
Có 30 vệ tinh làm việc và dự phòng. Chúng được xếp trên 6 mặt phẳng quỹ đạo nghiêng 55 so với
mặt phẳng xích đạo (hình2). Mỗi quỹ đạo của vệ tinh là một vòng tròn với độ cao
Hình 2
danh nghĩa là 20183km. Khoảng thời gian cần thiết để vệ tinh bay quanh một quỹ đạo là 12 giờ hằng tinh
(bằng một nửa thời gian tự quay quanh mình của Trái đất). Các vệ tinh được sắp xếp đảm bảo sao cho vào
một thời điểm bất kỳ, tại một trạm đo nào đó cũng quan sát được bốn vệ tinh một cách thuận tiện. Mỗi vệ
tinh phát ra hai tần số vô tuyến phục vụ mục đích định vị là L1trên tần số 1575,42MHz và L2 trên tần số
1227,6MHz. Các tần số sóng mang và công việc điều biến được được điều khiển bởi những đồng hồ nguyên
tử đặt trên vệ tinh.
2) Phần điều khiển:
Đặt trên mặt đất sẽ hiển thị sự hoạt động của các vệ tinh, xác định quỹ đạo của chúng, xử lý các
đồng hồ nguyên tử, truyền mệnh lệnh lên các vệ tinh.
7. Chọn điểm mốc GPS .
Chọn điểm mốc GPS phải:

4
1/Cao, thoáng,không gặp chướng ngại vật như tán cây, nhà cao tầng….,đảm bảo các góc
ngưỡng ngắm đến các vệ tinh lớn hơn 15 độ .
2/Cách xa đài phát sóng 200 mét, xa đường điện cao thế 50 met.
3/Các điểm đo tạo thành một vòng đo đồng thời khép kín ( vòng đo session).
8. Chọn khung giờ lịch đo GPS.
1/ Căn cứ vào ngày đo và địa điểm đo tra trong lịch vệ tinh để tìm ra khung thời gian trong
ngày đo ngắm tốt đến được bốn vệ tinh (ca đo GPS):
+Giờ bắt đầu đo?
+Giờ kết thúc đo?
2/Thời lượng thu tín hiệu tại mỗi điểm phụ thuộc vào phương pháp đo và độ chính xác cần đạt
được.
9. Các phương pháp đo GPS.
1/ Phương pháp đo GPS tuyệt đối.
1/ Đo GPS tuyệt đối là trường hợp sử dụng máy thu GPS đặt ngay tại điểm cần đo để xác định ngay
ra tọa độ địa tâm quốc tế WGS-84 (X,Y,Z) hoặc ra tọa độ trắc địa quốc tế WGS-84 (B,L,Htđ) của điểm cần
đo ấy.
2/ Máy thu GPS tiến hành tính toán định vị với tần xuất cứ mỗi giây được một kết quả vị trí và độ
chính xác đạt được cỡ mét. Phương pháp này thường được áp dụng cho mục đích dẫn đường gắn trên vật
thể cần theo dõi như ô tô, tàu thủy, máy bay….
2/ Phương pháp đo GPS tương đối.
+Khi cần xác định vị trí điểm với độ chính xác đạt được cỡ xăng ti mét hay cỡ mi li mét thì phải áp
dụng phương pháp đo GPS tương đối.
+Đo GPS tương đối là trường hợp sử dụng ít nhất hai máy thu GPS đặt ở hai điểm quan sát khác
nhau A và B để xác định hiệu tọa độ địa tâm quốc tế WGS-84 (X,Y,Z) hoặc hiệu tọa độ trắc địa quốc
tế WGS-84 (B,L,Htđ).
21/. Phương pháp đo GPS tương đối tĩnh (“đo tĩnh”).
1a/Phương pháp “đo tĩnh” là trường hợp cần phải có hai máy thu GPS. Cả hai máy thu GPS được
đặt ở hai điểm quan sát khác nhau A và B, cùng đồng thời thu tín hiệu từ vệ tinh chung cùng tên liên tục
trong khoảng thời gian nhất định từ vài chục phút đến vài tiếng đồng hồ.
1b/Phương pháp “đo tĩnh” được sử dụng để xác định hiệu tọa độ giữa hai điểm A và B cách xa
nhau hàng chục hay hàng trăm kilomet, với độ chính xác cao cỡ xăng ti mét hoặc cỡ mi li mét. Nghĩa là
thỏa mãn yêu cầu của việc lập lưới khống chế trắc địa. Đây là ưu điểm chính của phương pháp “đo tĩnh”.
1c/Nhược điểm của phương pháp “đo tĩnh” này là mất thời gian đo lâu, do đó năng suất lao động
không cao.
22/. Phương pháp đo GPS tương đối động (“đo động”).
2a/Phương pháp “đo động” là trường hợp cần phải có ít nhất hai máy thu GPS, đồng thời cần phải
có một cạnh đáy AB đã biết chiều dài được gối lên một điểm A đã biết tọa độ. Phương pháp “đo động” cho

5
phép xác định vị trí tương đối của hàng loạt điểm cần đo so với điểm A đã biết tọa độ, trong đó tại mỗi
điểm cần đo chỉ phải thu tín hiệu trong vòng vài giây đến vài phút.
2b/Tại một điểm đầu cạnh đáy A, đặt một máy thu GPS cố định và cho tiến hành thu liên tục tín
hiệu vệ tinh trong suốt chu kỳ đo. Máy này được gọi là máy cố định.
Tại điểm cuối của cạnh đáy B, đặt một máy thu GPS thứ hai, cho nó thu tín hiệu đồng thời với máy
thu GPS cố định trong vòng một phút. Máy này được gọi là máy di động.
Tiếp theo, lần lượt cho máy di động chuyển đến các điểm cần đo khác 1, 2, 3, …n,. Tại mỗi điểm này
chỉ cần dừng lại để thu tín hiệu vệ tinh trong khoảng thời gian vài phút.
Cuối cùng cho máy di động quay về đo điểm xuất phát ban đầu B là điểm cuối của cạnh đáy để
khép tuyến đo.
Nghĩa là máy di động lần lượt đo B, 1, 2, 3…, n, B.
2c/Yêu cầu bắt buộc của phương pháp này là máy thu GPS cố định và máy thu GPS di động phải
đồng thời thu tín hiệu liên tục từ ít nhất bốn vệ tinh chung cùng tên trong suốt cả chu kỳ đo. Khi đo bị gián
đoạn thì phải đo lại từ đầu.
23/. Phương pháp đo GPS tương đối giả động (“đo giả động”).
3a/Phương pháp “đo giả động” là trường hợp cần phải có ít nhất hai máy thu GPS và một điểm A
đã biết tọa độ. Phương pháp này cho phép xác định vị trí tương đối giữa hàng loạt điểm cần đo so với điểm
A đã biết tọa độ trong khoảng thời gian khá nhanh.
3b/- Máy cố định được đặt tại điểm A đã biết tọa độ và tiến hành thu tín hiệu vệ tinh liên tục trong
suốt cả chu kỳ đo.
Máy di động được đặt lần lượt tại các điểm cần đo 1, 2, 3,…, n, 1. Nghĩa là từ điểm đầu 1…, đến
điểm cuối n, rồi khép lại điểm đầu 1. Đây là vòng đo thứ nhất.
Tiếp theo, ở vòng đo thứ hai, máy di động tiến hành đo lặp lại tất cả các điểm cần đo trên theo đúng
trình tự của vòng đo thứ nhất (1, 2, 3,…., n, 1), đồng thời đảm bảo sao cho thời gian dãn cách giữa hai lần
đo của cùng một điểm từ vòng đo thứ nhất đến vòng đo thứ hai phải lâu hơn một giờ đồng hồ.
3c/Yêu cầu bắt buộc của phương pháp này là phải có ít nhất ba vệ tinh chung cùng tên cho cả hai
lần đo tại mỗi điểm quan sát.
Chú ý1: Để tránh cản trở tín hiệu từ vệ tinh tới ăng ten thu thì điểm đặt máy đo GPS phải có bầu
trời quang đãng, không có chướng ngại vật như tán cây hay nhà nhiều tầng v.v… Bầu trời nói ở đây là phần
không gian có góc đứng của các tia ngắm từ máy đo GPS đến vệ tinh phải lớn hơn 15 (góc ngưỡng V >
15).
Chú ý2:Để tránh nhiễu tín hiệu từ vệ tinh tới ăng ten thu thì điểm đặt máy đo GPS phải đảm bảo
các yêu cầu sau:
+ Cách xa đài phát sóng hơn 200m.
+ Cách xa đường điện cao thế hơn 50m.
10. Kết quả đo đạc từ máy thu GPS và các bước tính toán chuyển đổi tọa độ.
Kết quả đo đạc nhận được từ máy thu GPS ở trên là những số liệu theo hệ quốc tế WGS-84, chúng
cần được tính chuyển đổi thành những số liệu theo hệ quốc gia VN-2000 bằng các công thức đã được hướng
dẫn bởi Cục Đo đạc - Bản đồ.
1/. Từ tọa độ trắc địa quốc tế WGS-84 (B,L,Htđ) tính ra tọa độ địa tâm quốc tế WGS-84 (X,Y,Z).
2/.Từ tọa độ địa tâm quốc tế WGS-84 (X,Y,Z) tính ra tọa độ địa tâm quốc gia VN-2000 (X’,Y’,Z’)









![Đề cương bài giảng Bản đồ đại cương [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260323/hoatudang2026/135x160/81191774414215.jpg)
![Tài liệu giảng dạy Bản đồ và Hệ thống thông tin địa lý [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260323/hoatudang2026/135x160/61501774414218.jpg)













