Văng ngang đuôi ô tô, hiện tượng cần kiểm soát
Xin giới thiệu bài viết “Văng ngang đuôi ô tô, hiện tượng cần kiểm soát” của
PGS.TS Nguyễn Khắc Trai, ĐHBK Hà Nội đăng trên Tạp chí Đăng Kiểm 08/2010
A. Thực tiễn văng ngang đuôi ô tô.
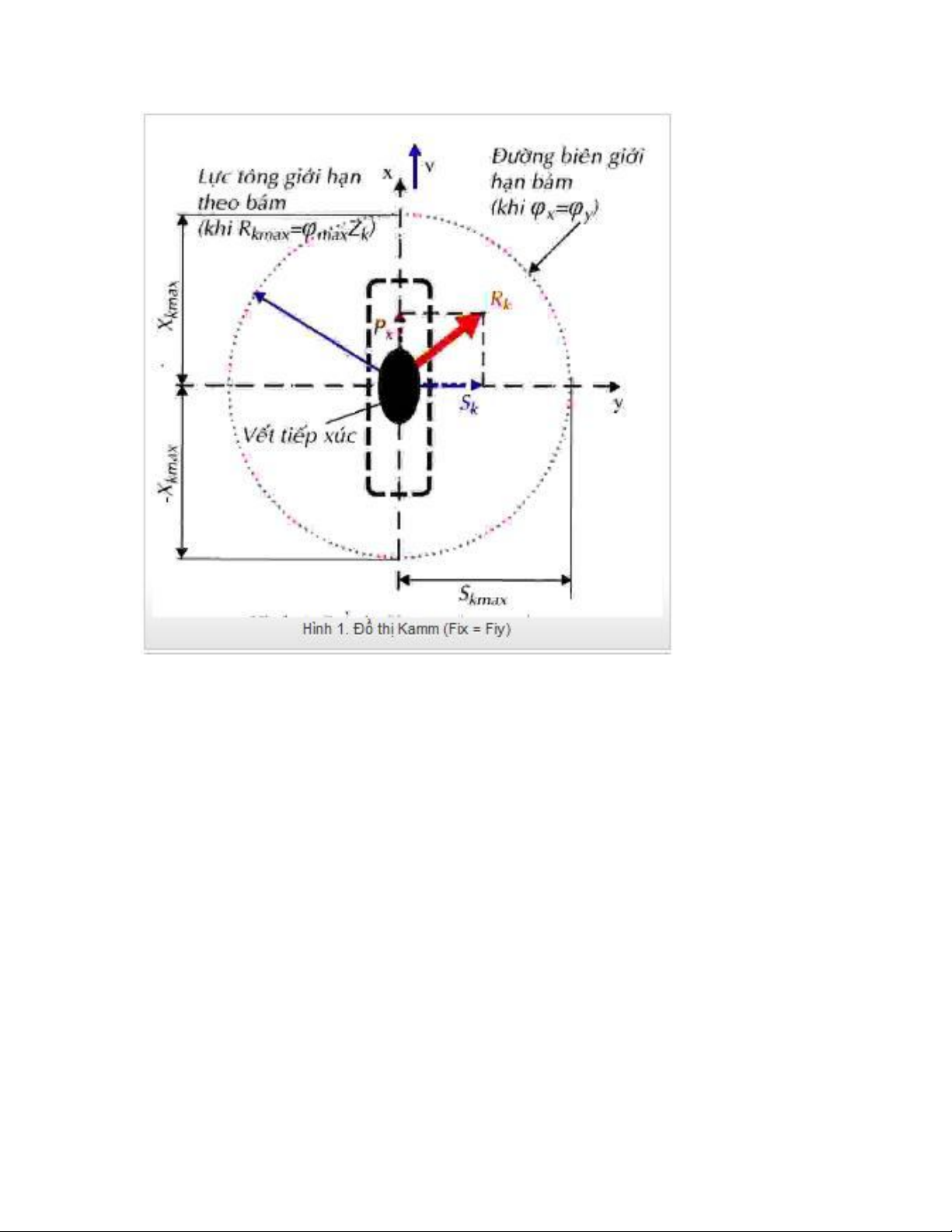
Hình 1. Đồ thị Kamm (Fix = Fiy)
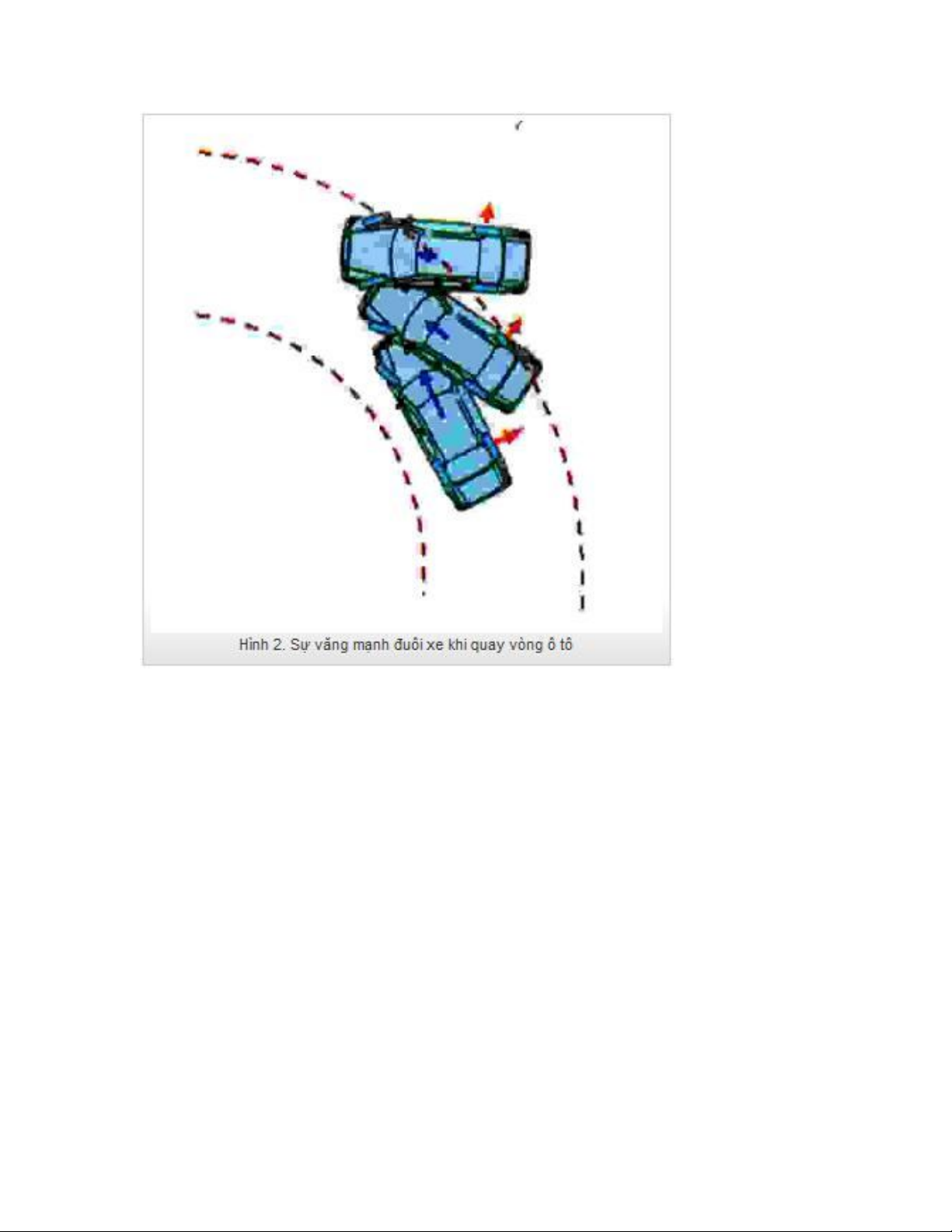
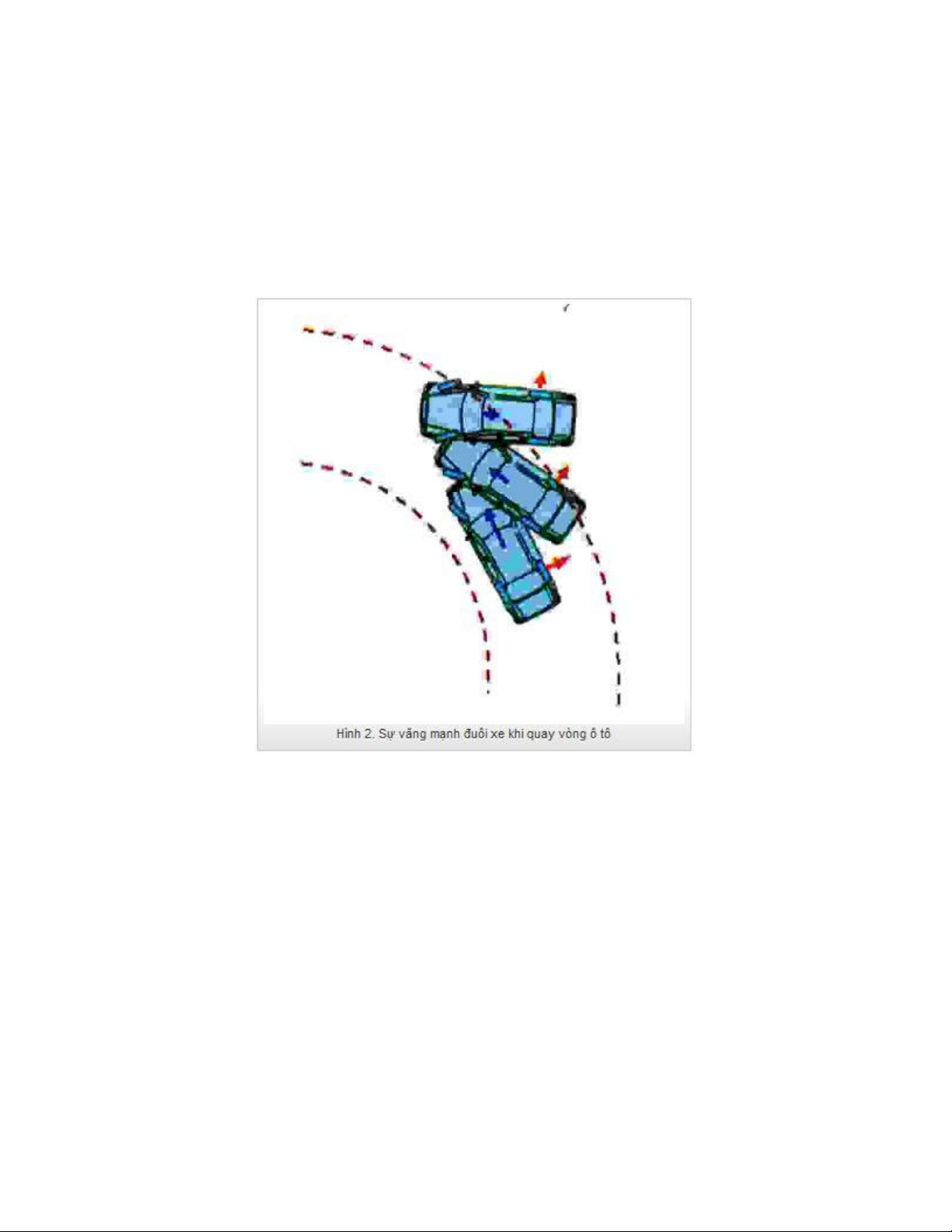
Hình 2. Sự văng mạnh đuôi xe khi quay vòng ô tô
Trong thời gian gần đây các nhà sản xuất và cơ quan kiểm định chất lượng công
bố về việc thu hồi một số xe hiện đại có hiện tượng “văng ngang đuôi ô tô”. Sự
“văng ngang đuôi ô tô” ở tốc độ cao thực chất là hiện tượng “trượt ngang cầu sau”.
Để hiểu rõ về vấn đề văng ngang cầu sau trên xe con hiện đại cần làm rõ về mặt lý
luận:
- Tại sao hiện tượng văng ngang cầu sau chỉ xảy ra khi quay vòng trên ô tô con
hiện đại?
- Tính chất nguy hiểm của vấn đề này như thế nào? Bạn đọc có thể tự trả lời sau
khi đọc bài này.

Sự văng ngang (còn gọi là trượt ngang bánh xe) được xuất phát từ việc xem xét
mối quan hệ của bánh xe đồng thời tiếp nhận cả lực dọc (phanh tay hay kéo) và
lực ngang.
B. Động lực học bánh xe và bản chất của hiện tượng trượt ngang.
Chưa bàn tới hiện tượng trượt ngang bánh xe trên ô tô con hiện đại, trượt ngang
bánh xe là một vấn đề không lạ với mọi trạng thái hoạt động của ô tô, kể cả ô tô
truyền thống hay ô tô hiện đại, kể cả bánh xe đặt trên cầu trước hay ở bánh xe đặt
trên cầu sau, kể cả xe đi trên đường nghiêng, khi gặp gió ngang tác dụng hay khi
quay vòng. Vì vậy về mặt động lực học tổng quát của bánh xe có thể xem xét tại
đây.
Hiện tượng trượt ngang bánh xe, trướt hết về mặt lý thuyêt, luôn tồn tại khi bánh
xe chịu tác động của phản lực bên. Tương thích trong mối quan hệ tổng thể, sự
trượt ngang bánh xe có thể lớn hay nhỏ và ảnh hưởng nhiều hay ít tới quỹ đạo
chuyển động và khả năng điều khiển ô tô.
Để đơn giản vấn đề, ở đây giải thích hiện tượng trượt tổng cộng (cả dọc và ngang)
của bánh xe khi chịu tác động của tải trọng thẳng đứng theo đồ thị Kamm (hình 1)
Một bánh xe lăn khi chịu tải trọng thẳng đứng Gbx sẽ xuất hiện phản lực thẳng
đứng Zbx tại chỗ tiếp xúc của mặt đường lên bánh xe. Bánh xe lăn và quay tròn
xung quanh trục quay của nó do tác dụng của mô men (lực đẩy từ từ khung đối với
bánh xe bị động, kéo đối với bánh xe chủ động) và tại chỗ tiếp xúc với mặt đường
xuất hiện lực dọc (được lý hiệu trên hình vẽ là lực X (X có dấu âm khi là lực
phanh, X có dấu dương khi là lực kéo). Khi bánh xe chịu tải trọng ngang, hình
thành phản lực bên là Sk.
Đồ thị Kamm biểu diễn quan hệ của lực dọc Xk và lực ngang Sk tác động trong khi
bánh xe chuyển động với giả thiết khả năng bám dọc và bám ngang của bánh xe

trên nền là như nhau ( φx=φy). Mô tả ban đầu là bánh xe lăn tựa trên nền có trục
tọa độ: x trùng phương của vận tốc bánh xe v, phương y vuông góc với trục x.
Trên hình minh họa vết tiếp xúc là hình elip.
Phản lực trên mặt phẳng nền là Rk được chiếu theo hai phương x và y tạo nên Pk
và Sk. Theo khả năng truyền lực của bánh xe theo bám, phản lực tổng cộng Rk phải
nằm trong đường biên giới hạn bám, tức Rk≤ Rkmax. Đầu mút của các giá trị Rkmax
sẽ vẽ nên một đường giới hạn (đồ thị Kamm giả thiết: φx=φy=φ) của phản lực là
vòng tròn tâm là vết tiếp xúc, bán kính là Rkmax=φmax.Zk.
Nếu lực tổng Rk nhỏ hơn Rkmax các phản lực được tiếp nhận và sự trượt xảy ra nhỏ.
Khi Rk lớn tới hay vượt qua giới hạn bám Rkmax bánh xe bị trượt mạnh (sự trượt
xảy ra có thể theo cả hai phương x, y).
Nhờ đồ thị Kamm có thể rút ra kết luận:
a. Nếu bánh xe chịu lực doc cực đại, bánh xe không có khả năng tiếp nhận lực
bên, hay nói cách khác: khi truyền lực dọc cực đại, chỉ cần một lực bên nhỏ tác
động bánh sẽ bị trượt mạnh.
b. Ngược lại: khi bánh xe đã bị trượt bên hoàn toàn (Sk đạt Skmax) bánh xe không
còn khả năng tiếp nhận lực dọc.
Phần lớn ô tô hiện đại đều mong muốn tận dụng cao khả năng bám theo phương
dọc, nhằm đảm bảo cho xe có khả năng cơ động. Điều này còn giúp cho sự chuyển
động của ô tô có tính kinh tế nhiên liệu, giảm thiểu ô nhiễm môi trường, nâng cao
độ bền lốp xe…. Như vậy trong trường hợp mong muốn đó (rơi vào kết luận a),
việc quản lý lực bên là cần thiết sao cho: phản lực tổng cộng tạo nên đảm bảo
bánh xe lăn với độ trượt nhỏ hợp lý.

![Máy sinh hóa tự động TC Matrix: [Thông tin chi tiết/Giá tốt nhất/Ưu đãi]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20180322/rush1987/135x160/121521683486.jpg)











![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)