1
Chương 3. Khảo sát ổnđịnh hệtuyến tính liên tục.
Điều khiển tự động
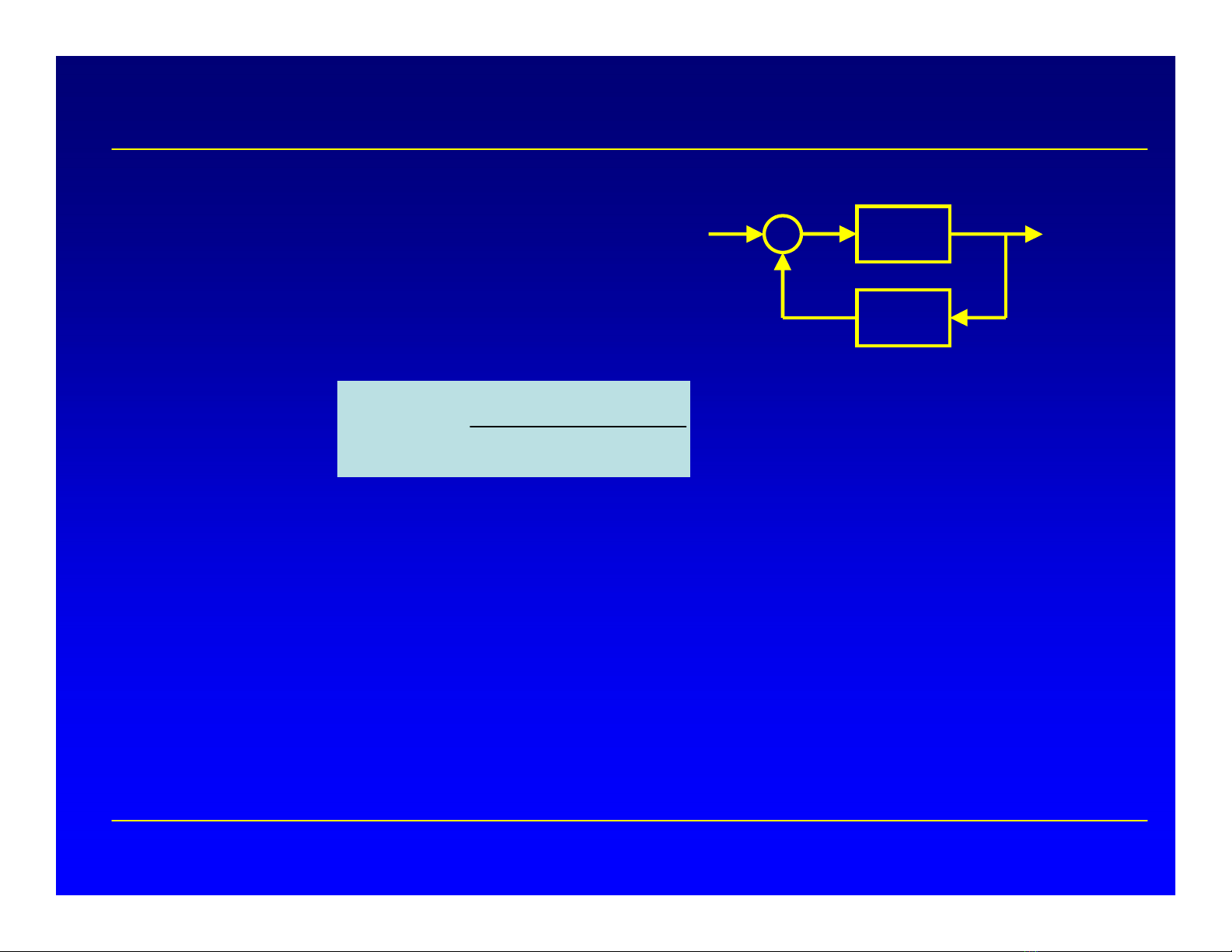
G
R
-
C
H
Cho hệthống:
Hàm truyền vòng kín:
)()(1
)
(
)( pHpG
p
G
pM
Phương trình đặctrưng (PTĐT):
F(p) = 1 + G(p).H(p) = 0
Định nghĩa hệthống ổnđịnh : tín hiệu ngõ ra bịchặn khi tín
hiệu ngõ vào bịchặn.
|r(t)| ≤N < ∞| c(t) | ≤M < ∞
I. Khái niệm chung