10/27/2018
1
Nhập môn Cơ điện tử
Introduction to Mechatronics
Giảng viên: TS. Nguyễn Anh Tuấn
Bộmôn Cơ điện tử–ĐHBK Hà Nội
Email: bktuan2000@gmail.com
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
UNIVERSITY OF SCIENCE AND TECHNOLOGY
1
Chương 4. Điều khiển trong Cơ điện tử
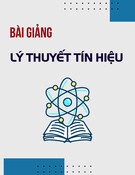
Content
1
Introduction to Mechatronics
1. Giới thiệu
2. Các thành phần của hệCĐT
3. Mô hình HT CĐT
5. Vai trò HTCĐT
4. Thiết kếHTCĐT
10/27/2018
2
Chapter 4. Control in Mechatronics
1. Giới thiệu
2
CHƯƠNG 4. ĐIỀU KHIỀN TRONG CĐT
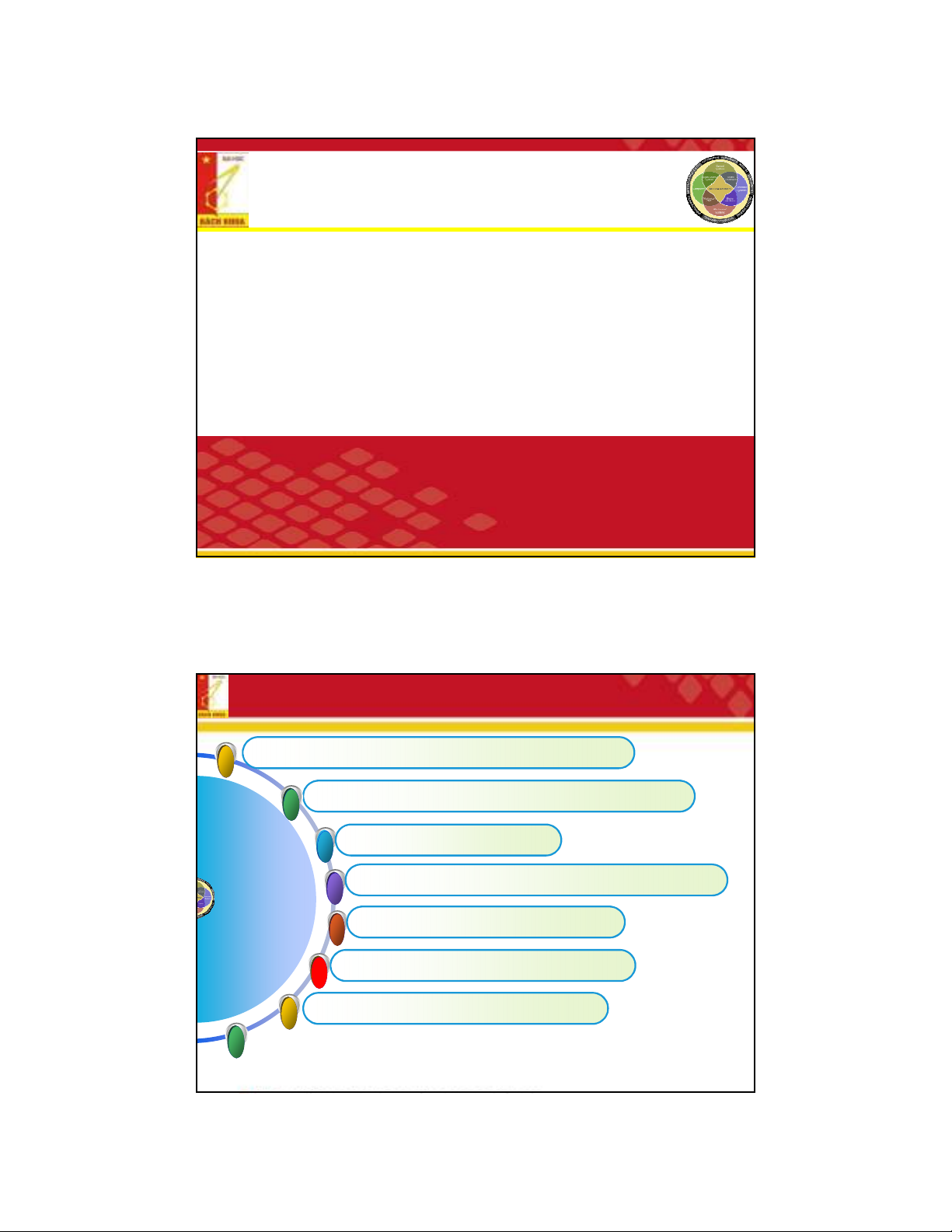
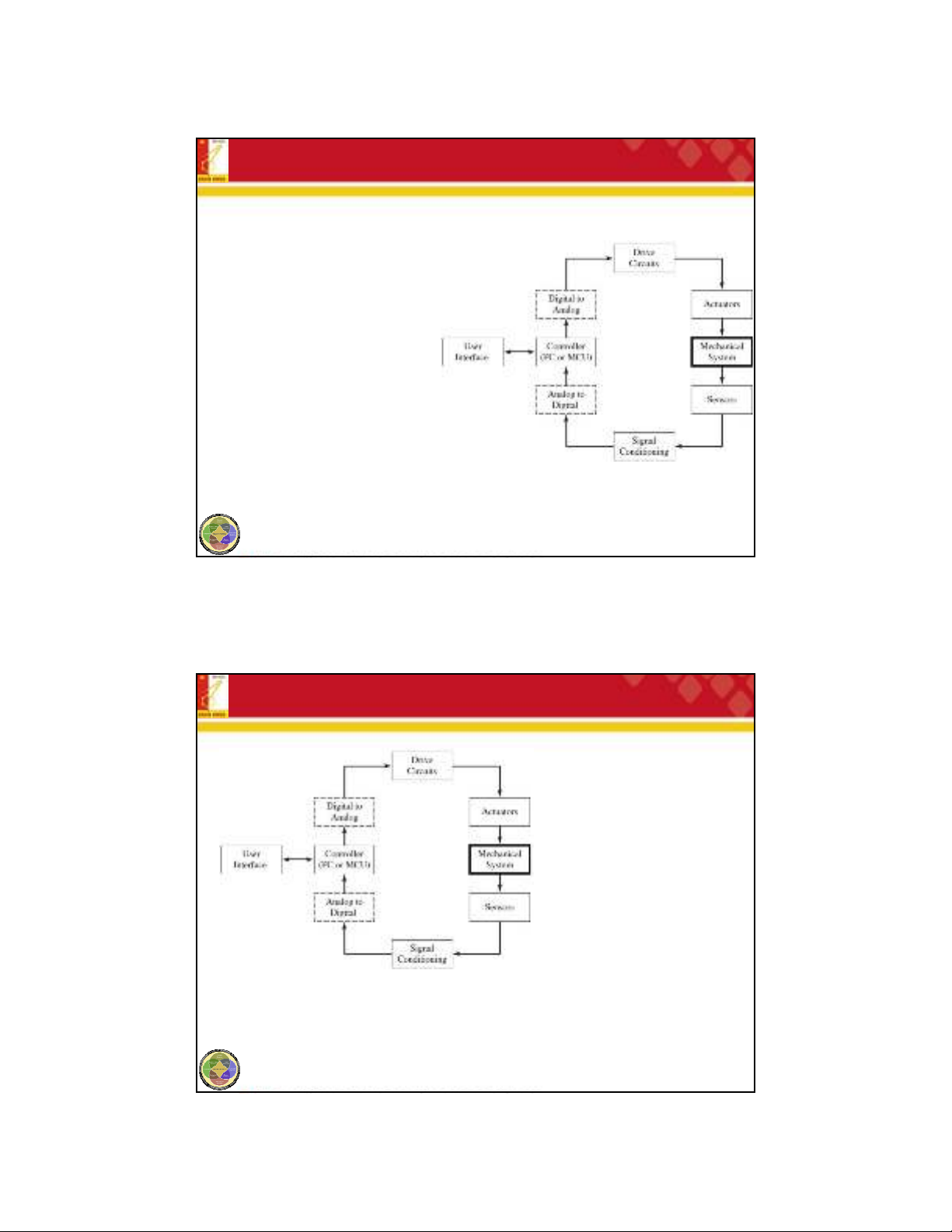
Sơ đồ tương tác giữa các phần tửtrong hệCĐT
Hệ thống truyền động
(Action)
•Mạch điều khiển điện
tử (Drive circuits)
•Phần tử chấp hành
(Actuator)
•Động cơ (Motor)
Hệ thống điều khiển
(Control)
•Mạch điều khiển hở
(Open Loop Control )
•Mạch điều khiển kín
(Closed Loop Control )
Hệ thống đo (Sensing)
•Cảm biến (Sensor)
•Xử lý tín hiệu đo (Sensor Conditioning)
•Chuyển đổi tương tự/số hoặc số/tương tự (A/D or
D/A converter)
4
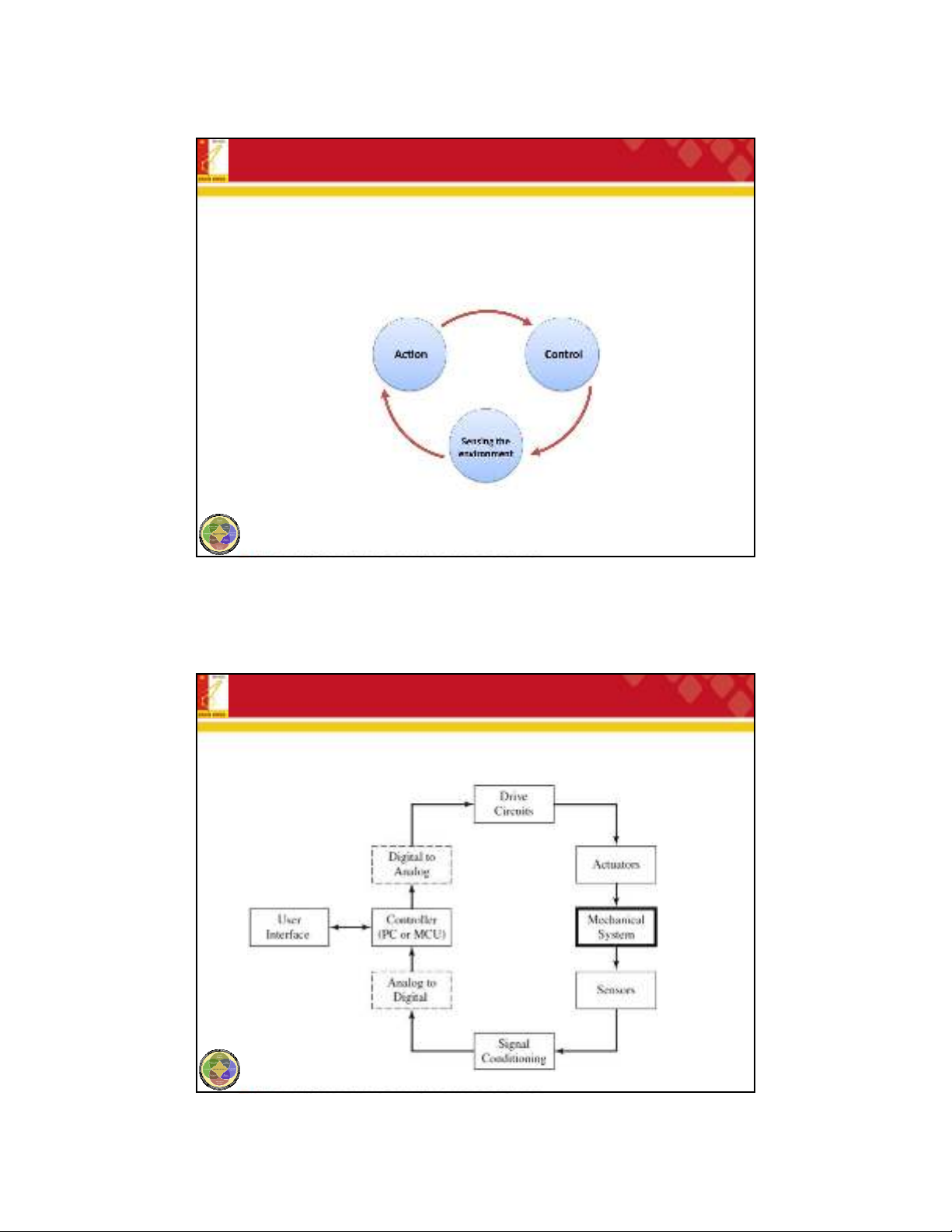
Sơ đồ hệ thống điều khiển CĐT
Introdution
10/27/2018
3
5
2. Các thành phần của hệcơ điện tử
•Phần tử cơ khí (Mechanical)
•Phần tử Điện tử (Electronics)
•Cảm biến (Sensors)
•Phần tử chấp hành (Actuators)
•Mạch điều khiển (Control)
•Mạch tính toán (Computer)
Components of a Mechatronic System
6
•Một hệ thống cơ điện tử
có cốt lõi của nó là một
hệ thống cơ khí được
điều khiển bởi một bộ
điều khiển. Bộ điều
khiển cần thông tin về
trạng thái của hệ thống.
Thông tin này được lấy
từ các cảm biến.
•Các tín hiệu đo của cảm biến cần được xử lý và chuyển đổi cho phù
hợp với cơ chế hoạt động của mạch điều khiển hệ thống CĐT. Các tín
hiệu sau khi được xử lý sẽ được chuyển đổi sang giá trị số thông qua
card A/D và gửi tới bộ điều khiển.
Components of a Mechatronic System
10/27/2018
4
6
Components of a Mechatronic System
•Bộ điều khiển là “trí
tuệ" của hệ thống cơ
điện tử, trong đó xử lý
và gửi lệnh đk đến các
cơ cấu chấp hành trong
hệ thống.
•Thiết bị truyền
động là các
thiết bị có thể
chuyển đổi
năng lượng
điện để tạo
thành cơ năng.
•Tín hiệu điều khiển thông
qua các thiết bị bao gồm:
các nút lệnh, đồ họa giao
diện người dùng (GUI),
màn hình điều khiển,
hoặc bảng điều khiển.
8
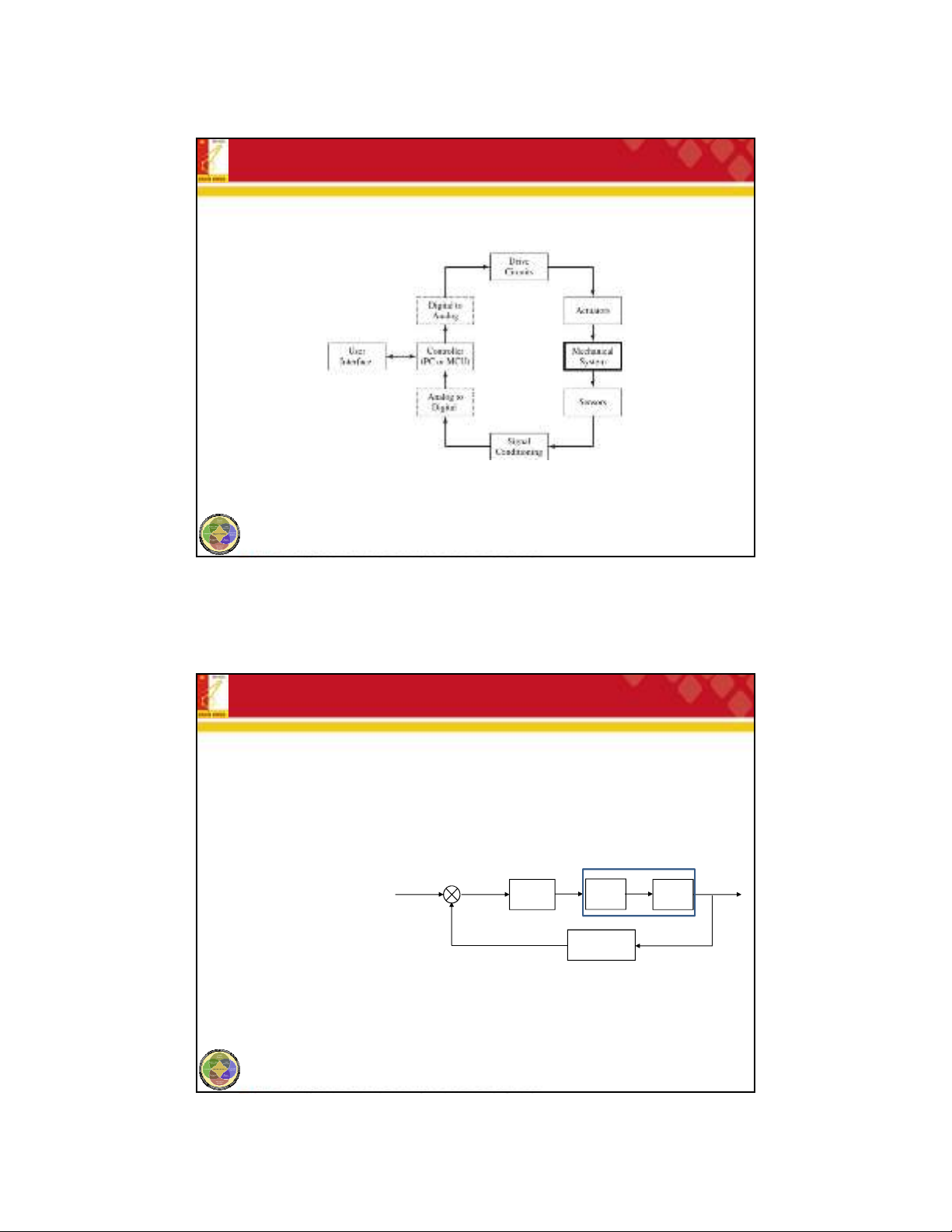
3. Mô hình hệthống điều khiển
3.1. Phần tử cơ bản:
•Hệ thống điều khiển có 3 khối chức năng cơ bản sau:
-Thiết bị điều khiển C
(Controller device).
-Đối tượng điều khiển O
(Object device)=A
(Actuation) + P (Process).
-Thiết bị đo lường M
(Measuring device).
Modeling of Mechatronic Systems
P
C
M
u(t) y(t)
x(t)
e(t)
z(t)
-
u(t) tín hiệu vào
e(t) Sại lệch điều khiển
x(t) Tín hiệu điều khiển
y(t) Tín hiệu ra
z(t) Tín hiệu phản hồi
A
O
10/27/2018
5
Quá trình bị điều khiển
theo yêu cầu đặt ra
9
Quá trình điều khiển
Modeling of Mechatronic Systems
10
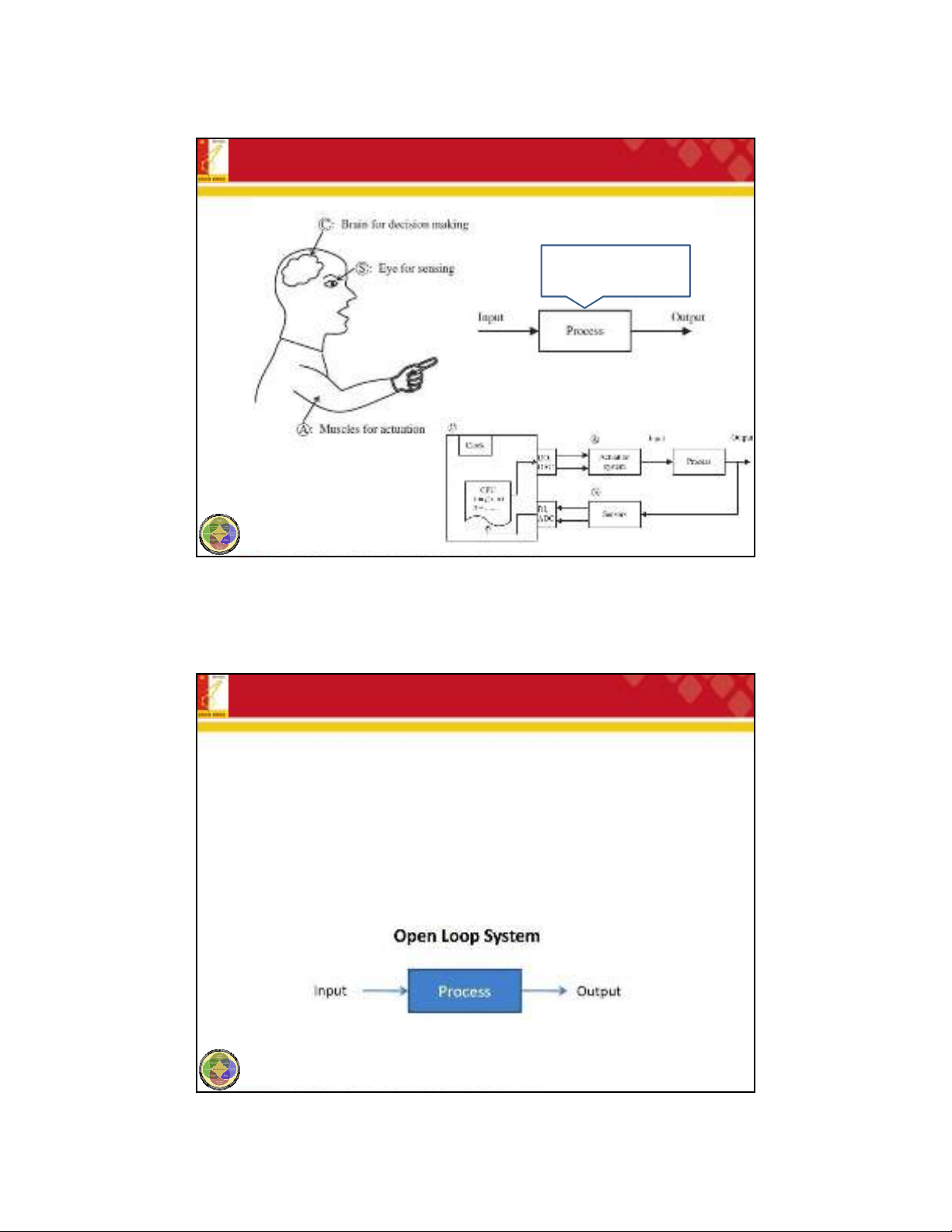
3.2. Phân loại hệ thống điều khiển:
•Open Loop Control
- Tín hiệu vào (input) và tín hiệu ra (output) không có quan hệ.
- Hệ thống nhạy cảm với nhiễu và độ bất ổn, cần có cơ chế bù nhiễu…
Sơ đồ điều khiển hệ hở
Modeling of Mechatronic Systems










![Bài giảng Giải tích mạch [chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251025/batien110906@gmail.com/135x160/97591761538639.jpg)