Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN : 978-604-82-1710-5
148
CẢI THIỆN CHẤT LƯỢNG BỘ ĐIỀU KHIỂN PI BẰNG
PHƯƠNG PHÁP TÁCH KÊNH CHO HỆ THỐNG MIMO
Phan Thanh Tùng
Đại học Thủy lợi, email: phanthanhtung86@gmail.com
1. GIỚI THIỆU CHUNG
Các mô hình toán học cho đối tượng công
nghiệp thông thường là hệ nhiều đầu vào
nhiều đầu ra MIMO. Các đầu vào và đầu ra
này có sự tương tác lẫn nhau và việc thiết kế
bộ điều khiển đáp ứng yêu cầu cho các hệ
thống này đòi hỏi nhu cầu cấp thiết. Có rất
nhiều bộ điều khiển hiện đại như bộ điều
khiển mờ, bộ điều khiển nơron… nhưng
thiết kế đơn giản mà tin cậy nhất là bộ điều
khiển PI.
Bộ điều khiển PI đã được phát triển và
ứng dụng rộng rãi trong công nghiệp, tuy
nhiên nó chỉ được thiết kế cho đối tượng một
vào một ra SISO. Nội dung của bài báo nhằm
sử dụng phương pháp tách kênh để biến một
hệ thống MIMO trở thành các hệ SISO riêng
rẽ và từ đó dễ dàng thiết kế được các bộ PI
cho từng phần.
2. PHƯƠNG PHÁP NGHIÊN CỨU
Qua nghiên cứu về tư tưởng thuật toán, tác
giả đề xuất phương pháp tách kênh để hỗ trợ
tính toán các bộ điều khiển PI nhằm cải thiện
chất lượng điều khiển: giảm thời gian xác lập
của hệ thống, và chống nhiễu tác động. Từ đó
chất lượng của hệ thống sử dụng phương
pháp tách kênh có chất lượng nâng cao so với
hệ thống cũ.
Mô hình trạng thái tuyến tính đối tượng
MIMO hai đầu vào, hai đầu ra:
dA B E
dt
xx u d
y = Cx
Trong đó:
10,334 4,050 0
A 9,834 5,332 3,050
0 1,282 3,550
,
1 0 0
C0 0 1
0,3737 0,4263
B 0,4263 0,3737
00
,
0,3737 0
E 0,0263 1
00
Với:
xT = [x1, x2, x3] là vector 3 biến trạng thái
uT = [u1, u2] là vector 2 đầu vào điều khiển
dT = [d1, d2] là vector 2 nhiễu loạn.
yT = [y1, y2] là vector 2 biến đầu ra.
Sử dụng phương pháp cặp đôi vào/ra dựa
trên RGA thì ta chọn cặp đôi u1-y2 và u2-y1. (1)
Hàm truyền cho mỗi cặp biến vào ra u1-y2;
u2-y1
2
21 1
Y ( s )
G ( s ) U ( s )
0,74223.(1 0,0527.s )
(1 0,06784.s ).(1 0,2345.s ).(1 4,5004.s )
1
12 2
Y ( s )
G ( s ) U ( s )
0,0737(1 0,207.s )(1 2,0008.s)
(1 0,0678.s ).(1 0,2347.s ).(1 4,5455.s )
Thiết kế bộ điều khiển phi tập trung PID
tức là ta chỉ thiết kế bộ điều khiển cho cặp
biến chính (u1-y2) còn ảnh hưởng của các
biến khác (từ u2 đến y2 coi là nhiễu).
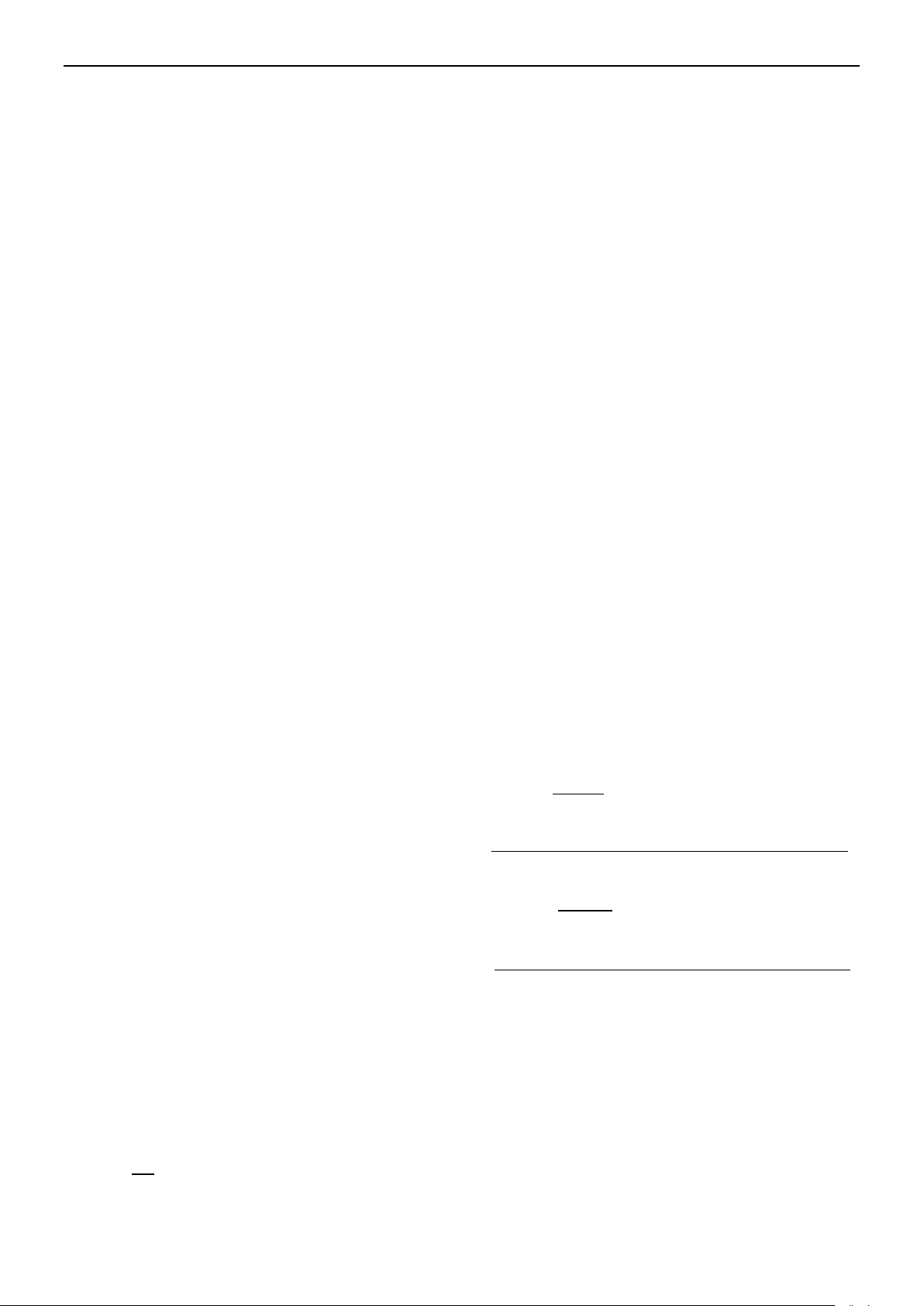
Ở đây: G = [G11 G12; G21 G22] là ma trận
hàm truyền từ đầu vào đến đầu ra;
Gd21 là hàm truyền nhiễu từ d1 đến y2;
R21 và R12 là hai bộ điều khiển cần tính;
Kd21 là hàm truyền bộ bù nhiễu.
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN : 978-604-82-1710-5
149
R21 G21
G11
G22
G12
R12
Kd21 Gd21
d1
u1
u2
y2
y1
-
-
-
+
+
+
W1
W2
Hình 1. Sơ đồ bộ điều khiển PI
chưa tách kênh.
Thiết kế bộ điều khiển PI chưa tách kênh:
Thiết kế bộ PID theo phương pháp tối ưu
độ lớn
21 p21 I21
1
R (s) k .(1 )
T .s
Tính được:
pI
21
1
k .( s)
T 12,146.(s 0,2222)
R (s ) ss
R12 (s) = -6,7843 . ( 1 +
1
1,3201.s
)
Nhận xét: Khi có bộ điều khiển PID thì
đầu ra bám giá trị đặt yêu cầu và sai lệch
tĩnh tiến tới 0. Tuy nhiên đặc tính động học
của hệ thống không tốt ở đầu ra y1 khi có
độ quá điều chỉnh lớn và thời gian xác lập
lâu. Nhược điểm chính của nó là không triệt
tiêu được ảnh hưởng của đầu vào thứ 2 lên
đầu ra thứ 2 (ở thời điểm 20s như kết quả
mô phỏng).
Thiết kế bộ điều khiển PI có tách kênh:
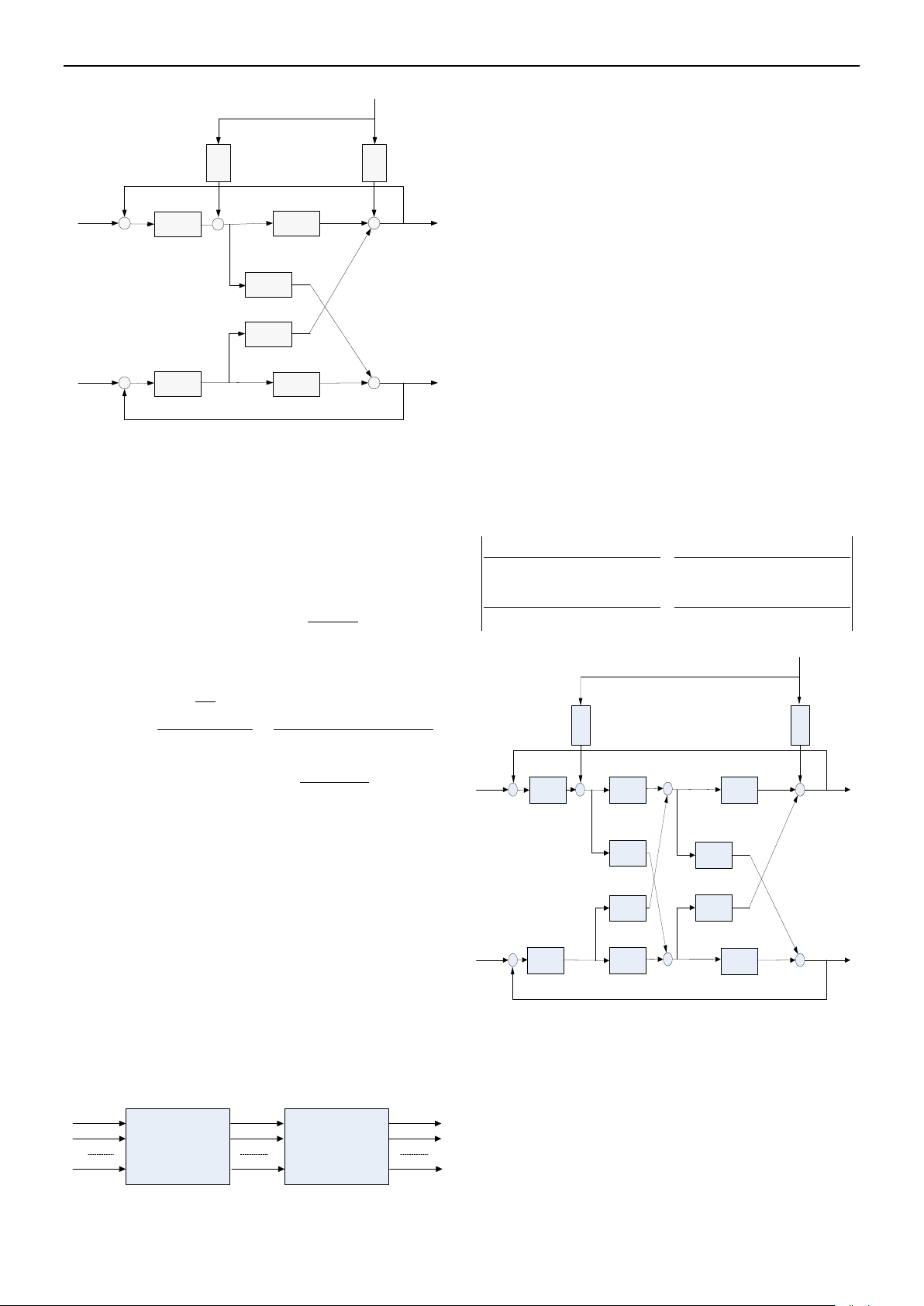
Bộ tách kênh Đối tượng
Hình 2. Sách lược tách kênh
Phương pháp tách kênh toàn phần:
1. Biến đổi G(s) = M(s).N(s)
M là ma trận đường chéo có các phần tử
là phân thức chứa mẫu số chung nhỏ nhất của
từng hàng của G. Nếu G có điểm không nằm
bên phải trục ảo thì điểm không đó phải xuất
hiện trên tử số trong từng phần tử trên đường
chéo chính của M.
N là một ma trận đa thứ, có thể nhân
thêm một phân thức có mẫu số chứa các điểm
không nằm bên phải trục ảo (xuất hiện trên tử
số của M.
2. Nghịch đảo N để nhận được khâu bù D.
Từ các tham số ma trận G(s) ta tính được
ma trận bù D:
D( s )
1.0347 (s+4.832) (s+0.4998) 1.1628 (s-0.8742)
(s+14.74) (s+4.263) (s+0.2222) (s+14.74) (s+4.263) (s+0.2222)
0.90701 (s+10.51) (s+2.988) -1.3265 (s+18.96)
(s+14.74) (s+4.263) (s+0.2222) (s+14.74) (s+4.2
63) (s+0.2222)
D11 G11
G21
G12
G22
D22
Kd11 Gd11
d1
u1
u2
y1
y2
-
-
-
+
+
+
W1
W2
D21
R1
R2
D12
+
+
Hình 3. Sơ đồ bộ điều khiển PI tách kênh.
Kết quả mô phỏng:
Để đánh giá kết quả ta sẽ đưa vào tín hiệu
điều khiển u1 và u2 lần lượt các giá trị đặt ở
các thời điểm khác nhau như sau:
r1 = 1 khi t = 2s và r1 = 2 khi t = 20 s
r2 = 0.5 khi t = 2s và r2 = 1.5 khi t = 60 s.
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN : 978-604-82-1710-5
150
Kết quả mô phỏng trường hợp chưa có nhiễu tác động :
Hình 4 : Kết quả mô phỏng đầu ra hệ thống với bộ điều khiển PI
chưa tách kênh, chưa nhiễu
Hình 5: Kết quả mô phỏng đầu ra hệ thống với bộ điều khiển PI có tách kênh, chưa nhiễu
3. SO SÁNH VÀ ĐÁNH GIÁ KẾT QUẢ
Khi chưa xét ảnh hưởng của nhiễu thì với
bộ điều khiển chưa tách kênh có độ quá điều
chỉnh lớn (200% với đầu ra Y1 và thời gian
xác lập lâu đến 40s). Với bộ điều khiển tách
kênh thì độ quá điều chỉnh chỉ 5% và thời
gian xác lập 2s cho Y1.
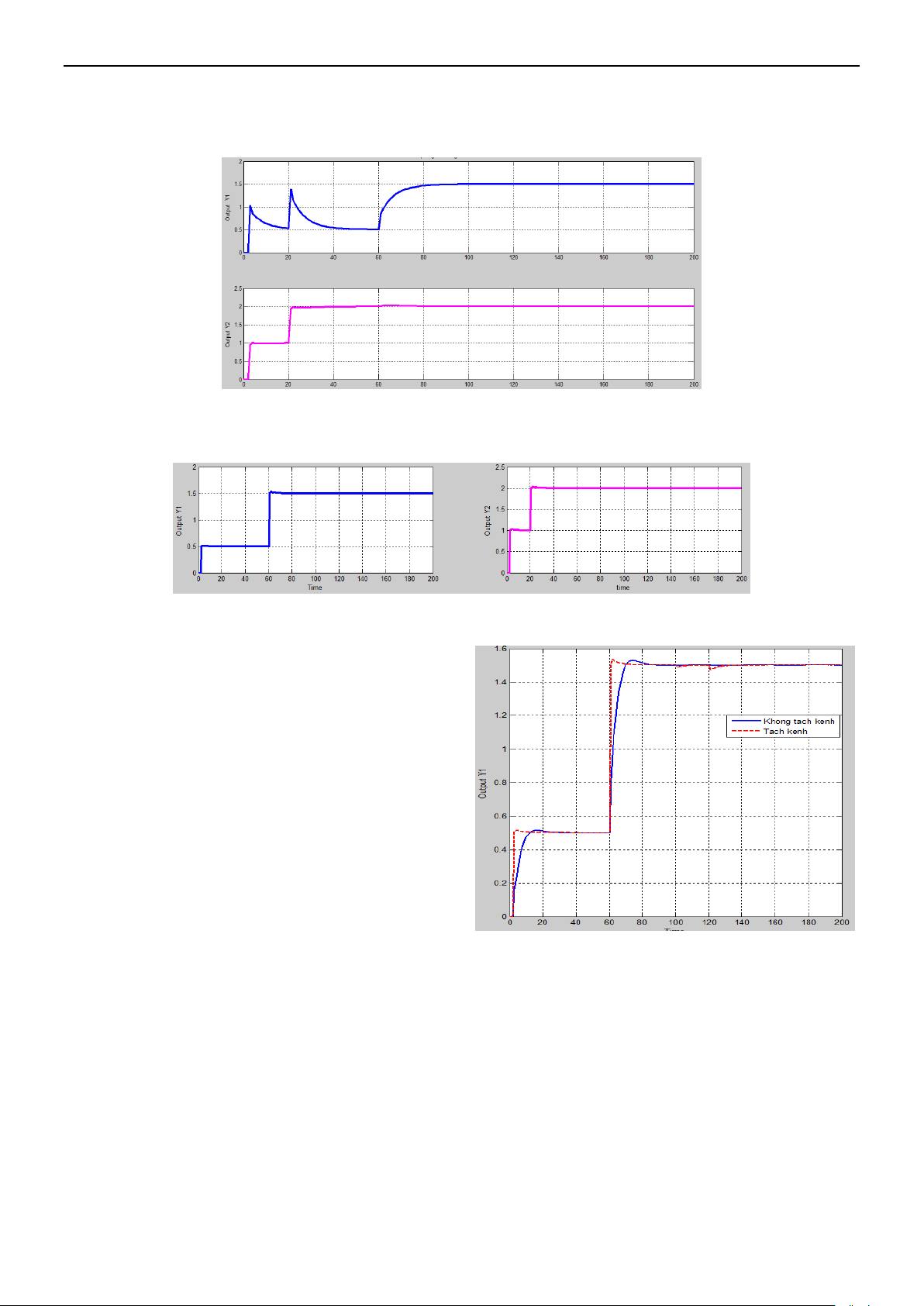
Khi xét ảnh hưởng của nhiễu ta cũng quan
sát thấy thời gian phản ứng bám giá trị đặt
của bộ tách kênh chỉ là 1s so với 5s của bộ
không tách kênh.
Ưu điểm chính của phương pháp tách kênh
đó là sự thay đổi giá trị đặt của đầu vào này
không tác động đến đầu ra kia.
4. KẾT LUẬN VÀ KIẾN NGHỊ
Với phương pháp tách kênh thì giúp cho
việc tính toán thiết kế bộ điều khiển PI trở
nên đơn giản và dễ dàng hơn. Chất lượng đầu
ra được cải thiện rõ rệt khi giảm độ quá điều
chỉnh đi 40 lần đồng thời giảm thời gian xác
lập đi 5 lần. Bộ điều khiển PI khi có tách
kênh cũng chống nhiễu tốt và mang lại lợi thế
to lớn.
Hình 6: Khi xét ảnh hưởng của nhiễu
của hai bộ PI
5. TÀI LIỆU THAM KHẢO
[1] Hoàng Minh Sơn: Cơ sở hệ thống điều khiển
quá trình, NXB Khoa học và Kỹ thuật, 2006.
[2] Nguyễn Doãn Phước, Phan Xuân Minh: Lý
thuyết điều khiển tuyến tính, NXB Khoa học
và Kỹ thuật, 2003.
[3] Robert H. Bishop: Modern Control System,
Prentice Hall, 2012.











![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)













