TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA CƠ KHÍ CHẾ TẠO MÁY
BỘ MÔN CƠ ĐIỆN TỬ
-------------------------
ĐỀ THI CUỐI KỲ HỌC KỲ 2 NĂM HỌC
2018-2019
Môn: Điều Khiển Tự Động
Mã môn học: AUCO330329
Đề số: 01 Đề thi có 2 trang.
Thời gian: 90 phút.
Sinh viên được phép sử dụng tài liệu và máy vi
tính nhưng không được kết nối wifi, 3G, Internet,
và không sử dụng điện thoai di động.
ĐÁP ÁN
Môn Thi: Điều Khiển Tự Động
Câu 1: <2,5 điểm>
Đáp án
Điểm
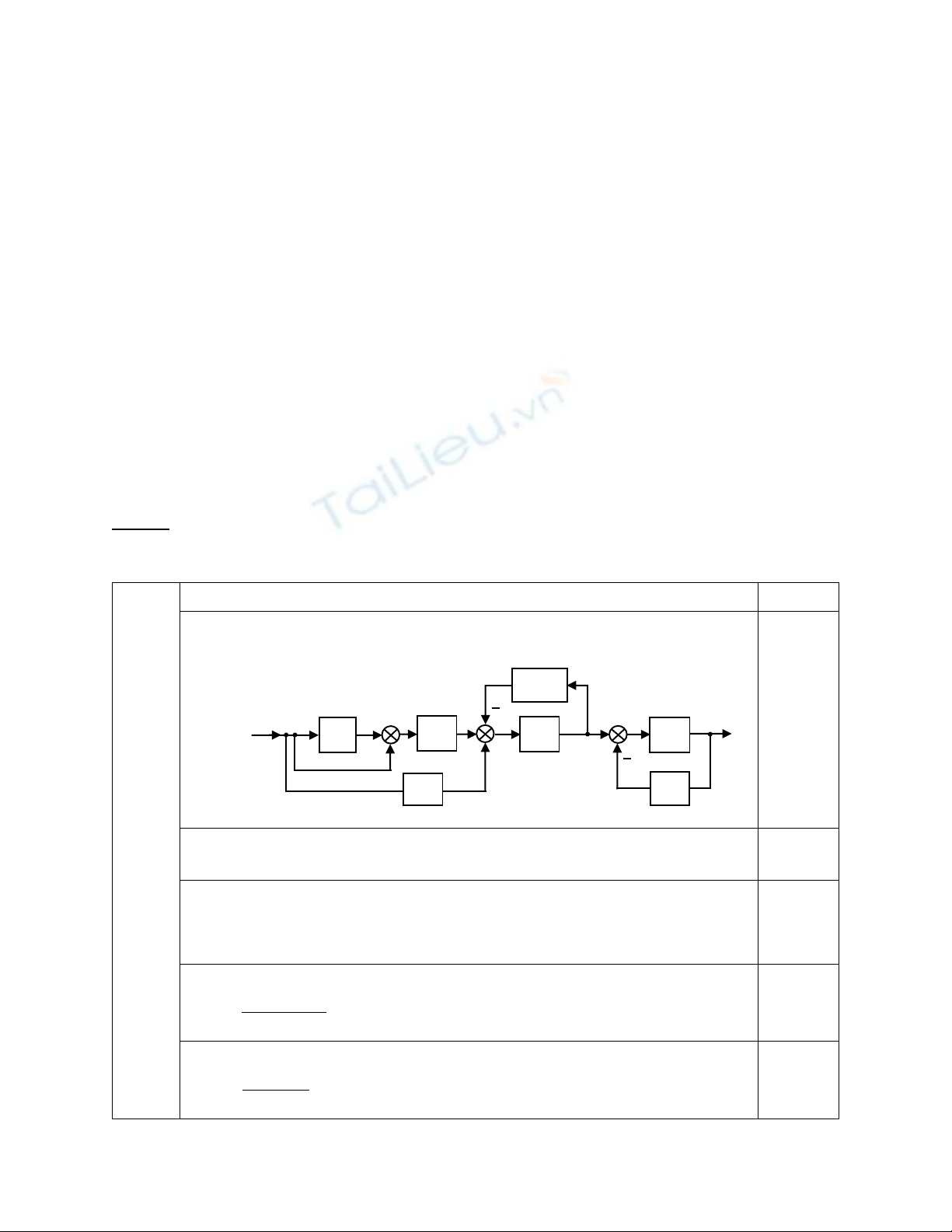
Sơ đồ tương đương:
- Biến đổi đúng quy tắc đại số sơ đồ khối (0,25đ)
- Có đóng khung các khối (0,25đ)
0,25
0,25
Xét hệ G1 // mạch đơn vị :
td1 1
G G 1
0,25
Xét hệ (Gtd1 nối tiếp G2) // G5 :
td2 td1 2 5
td2 1 2 2 5
G G G G
G G G G G
0,25
0,25
Xét hệ hồi tiếp âm đơn vị G3 – G2H1:
3
td3 3 2 1
G
G1 G G H
0,25
Xét hệ hồi tiếp G4 – H2:
4
td4 42
G
G1 G H
0,25
R
Y
G2
G1
G2H1
G3
G4
G5
H2
CÂU 2
(2,5
điểm)
Đáp án
Điểm
a Giả sử tín hiệu nhiễu d(t)=0, tìm hàm truyền giữa ngõ ra y(t) và tín
hiệu vào r(t).
2
( ) ( )
()
( ) 1 ( ) ( )
2
516
()
() 2
15 16
25
()
( ) 12 8
c
R
c
R
R
G s G s
Ys
R s G s G s
s
s s s
Ys
Rs s
s s s
s
Ys
R s s s
0,25
0,5
0,25
b Giả sử tín hiệu ngõ vào r(t)=0, tìm hàm truyền giữa ngõ ra y(t)
và tín hiệu nhiễu d(t)
0,25
0,5
Hàm truyền của hệ thống cũng là hàm truyền hệ nối tiếp:
td td2 td3 td4
G G .G .G
34
td 1 2 2 5 2 3 1 4 2
GG
G (G G G G ). .
1 G G H 1 G H
0,25
0,25
1 2 3 4 2 3 4 5 3 4
td 2 3 1 4 2 2 3 1 4 2
G G G G G G G G G G
G1 G G H G H G G H G H
0,25
Sinh viên có thể có các cách giải khác nhau và cũng sẽ được tính
điểm theo từng bước làm đúng như đáp án trên
2
() ()
( ) 1 ( ) ( )
16
()
() 2
15 16
()
( ) 12 8
D
c
R
R
Ys Gs
D s G s G s
s
ss
Ys
Rs s
s s s
Ys s
R s s s
0,25
c Giả sử tín hiệu ngõ vào r(t)=1(t) và d(t)=0,05 x 1(t), tìm tín hiệu ra
y(t).
22
2
22
25 1 0,05
( ) ( ) ( ) 12 8 12 8
2 5 2 5,05
0,05
() 12 8
12 8 12 8
RD
ss
Y S Y s Y s s s s s s s
ss
YS ss
s s s s s s
0,25
0,25
Câu 3 (2,50 điểm)
Đáp án
Điểm
A Tìm hàm truyền hệ thống kín
Hàm truyền hệ thống kín
k32
G(s) K
G (s) 1 G(s) s 15s 50s K
Phương trình đặc tính của hệ thống
32
s 15s 50s K 0
0,25
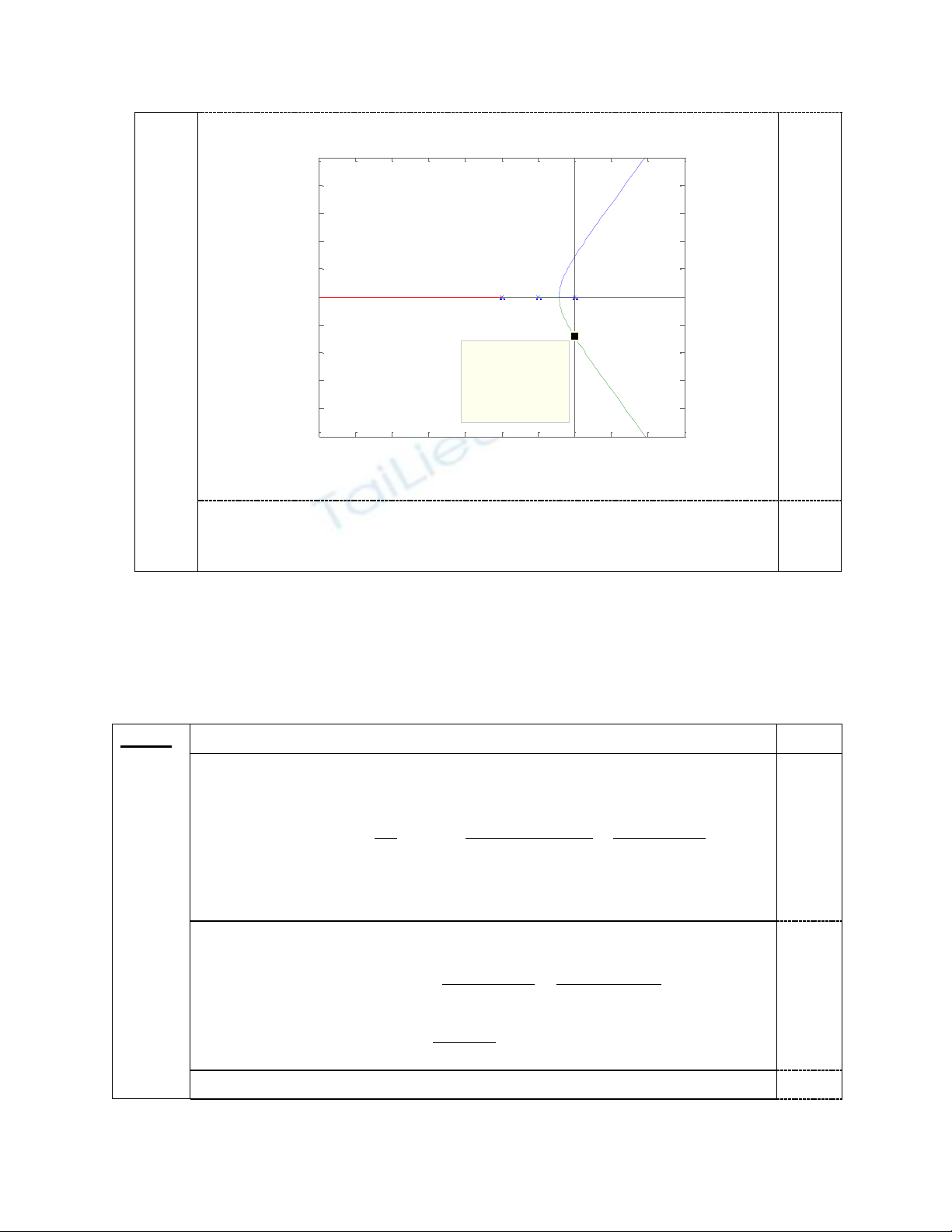
Vẽ quỹ đạo nghiệm số:
G(s) có ba cực là p1 = 0 ; p2 =
5; p2 =
10 và không có zero.
0,25
Quỹ đạo nghiệm hệ kín gồm ba nhánh xuất phát từ các cực khi K=0.
Khi K, ba nhánh tiến tới theo các tiệm cận xác định bởi:
0,25
Góc giữa các tiệm cận và trục thực
0,25
Giao điểm giữa các tiệm cận và trục thực có hoành độ:
(0 5 10) 0 5
30
o
poles zeros
Rnm
0,25
QĐN đối xứng qua trục thực
Xác định điểm tách của QĐN
Viết lại phương trình đặc tính :
32
s 15s 50s K 0
32
K s 15s 50s
0,25
Từ phương trình đặc tính suy ra:
2
dK (3s 30s 50)
ds
Do đó:
2
(3s 30s 50) 0
Giải ra ta được hai nghiệm s1 =
7.87 và s2 =
2.11
Chỉ có nghiệm s2 phù hợp là điểm tách vì thoả điều kiện tổng số cực
và zero bên phải nó là một số lẻ.
0,25
Giao điểm của QĐN với trục ảo:
Thay s = j vào phương trình đặc tính ta được:
32
j 15 50j K 0
2
3
15 K 0
50 0
0; K 0
50 ; K 750
Vậy các giao điểm cần tìm là
s j 50 j7,07
0,25
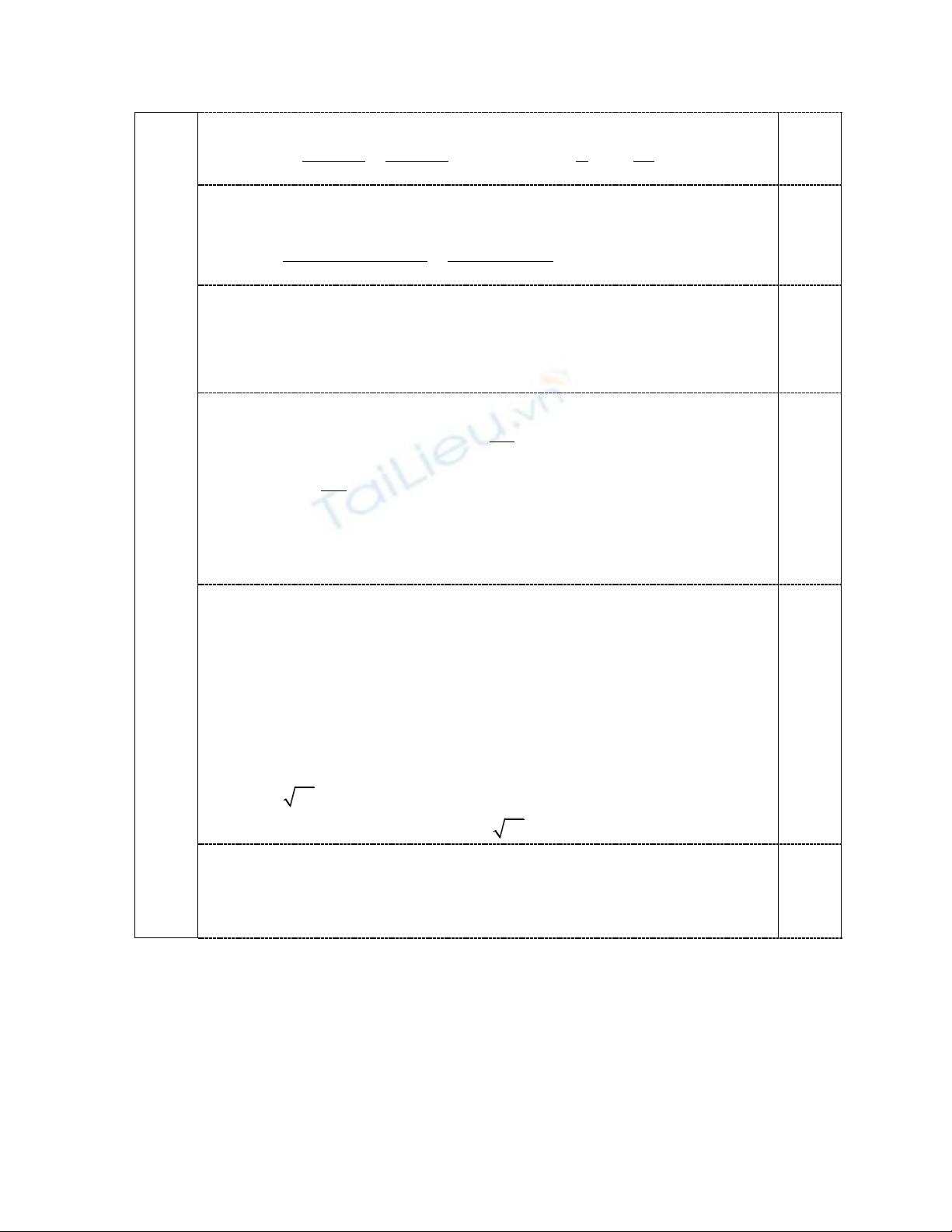
Đồ thị của QĐN:
- Vẽ đúng biên dạng quỹ đạo nghiệm số
- Đặt đúng các giá trị trên quỹ đạo nghiệm số
0,25
i(2i 1) (2i 1)
n m 3 0
5
;;
33
dK 0
ds
0 K 750
Hệ thống không ổn định
K 750
Hệ thống ở biên giới ổn định
K 750
Hệ thống ổn định
0,25
Câu 4
(2,5
điểm)
Đáp án
Điểm
a) Tìm hàm truyền của hệ thống
Hàm truyền bộ PID:
22
I D P I
PID P D
K K s K s K s 12s 35
G (s) K K s
s s s
0,25
Hàm truyền mạch chính:
2
PID
PID
h
h
s 12s 35 6
G (s) G (s).G(s) s s 5 s 17
6(s 7)
G (s) G (s).G(s) s(s 17)
0,25
Hàm truyền kín của hệ thống :
Root Locus
Real Axis (seconds-1)
Imaginary Axis (seconds-1)
-35 -30 -25 -20 -15 -10 -5 0 5 10 15
-25
-20
-15
-10
-5
0
5
10
15
20
25
System: ht
Gain: 751
Pole: 0.00179 - 7.07i
Damping: -0.000253
Overshoot (%): 100
Frequency (rad/s): 7.07
![Đề thi Điều khiển tự động cuối kỳ 1 (2020-2021) có đáp án [FULL]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260209/diegomaradona04/135x160/85251771081312.jpg)




![Đề thi Điều khiển tự động học kì 1 năm 2024-2025 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250401/lakim0906/135x160/6291743476385.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)