Nghiên cứu thiết kế chế tạo bộ giao tiếp giữa máy tính và ecu điều khiển động cơ
Mục tiêu của chủ đề này là thiết kế, chế tạo bộ giao tiếp giữa máy tính và ECU
điều khiển động cơ và giao diện giao tiếp bằng phần mềm Matlab.
KS. Huỳnh Quốc Việt
Học viên cao học khoá: 2003 - 2005
Khoa Cơ khí Động lực
Trường Đại học Sư phạm Kỹ thuật TP. Hồ Chí Minh
email: vietckd@yahoo.com
Tóm tắt
Mục tiêu của chủ đề này là thiết kế, chế tạo bộ giao tiếp giữa máy tính và ECU
điều khiển động cơ và giao diện giao tiếp bằng phần mềm Matlab. Từ đó, đưa ra
giao thức truyền dữ liệu giữa động cơ và máy tính thông qua cổng nối tiếp RS-
232, sao cho, trên giao diện người sử dụng có thể quan sát sự thay các thông số
động cơ. Mặt khác, họ có thể thay đổi các thông số đầu vào để thấy được các đáp

ứng của các tín hiệu điều khiển cơ cấu chấp hành. Ngoài ra, người sử dụng cũng
có thể điều khiển nguồn cung cấp cho động cơ, khởi động động cơ và truy xuất mã
lỗi bằng máy tính.
Abstract
The purpose of this topic is to design the interface communicator between
computer and ECU by mean of matlab software. Thenceforth, it could lay out the
protocol of data transferring between the engine and computer through the serial
port RS-232, so that the user could observe the change of the engine parameters
from the interface. One the other hand, the user could also change one of those
input parameters to see the response of actuators. Besides, the user could also use
computer to turn off/turn on, to start or access code of the engine.
Giới thiệu
Thiết kế và chế tạo mạch giao tiếp hai chiều giữa máy tính và ECU điều khiển
động cơ nhằm hiển thị các thông số hoạt động của động cơ, đồng thời, điều khiển
động cơ từ máy tính. Việc tính toán mô phỏng và điều khiển động cơ được thực
hiện thông qua phần mềm matlab. Trên cơ sở mạch giao tiếp này ta có thể phát
triển các thiết bị chẩn đoán và sửa chữa động cơ.
Trên giao diện giao tiếp máy tính chúng ta có thể:
- Điều khiển nguồn điện cấp cho động cơ, tương ứng với trường hợp công tắc máy
ở vị trí ON.
- Điều khiển động cơ khởi động, tương ứng với trường hợp công tắc máy ở vị trí
ST.
- Điều khiển động cơ đang hoạt động
+ Nếu không sử dụng giao diện giao tiếp với máy tính, các tín hiệu đầu vào của
động cơ được chuyển đến vi điều khiển sau đó truyền đến ECU để điều khiển
động cơ.
+ Nếu chúng ta đang sử dụng giao tiếp với máy tính, ngoài việc chuyển dữ liệu
đến ECU, vi điều khiển còn truyền dữ liệu đó lên máy tính.
+ Ngoài ra, vi điều khiển còn nhận các tín hiệu điều khiển đánh lửa - IGT, tín hiệu

điều khiển kim phun - #10 để tính toán tốc độ động cơ, thời gian ngậm điện, thời
gian phun nhiên liệu và truyền lên máy tính.
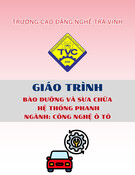
- Điều khiển chẩn đoán động cơ, bộ giao tiếp điều khiển chân TE1 nối mát và
nhận dữ liệu truyền từ chân W, xác định mã lỗi và truyền đến máy tính.
Thiết kế phần cứng bộ giao tiếp
Trong quá trình nghiên cứu lý thuyết về các xung tín hiệu của động cơ, ta thấy các
tín hiệu đầu vào khá đa dạng: gồm cả tín hiệu số và tín hiệu tương tự. Vì vậy,
trước khi thực hiện kết nối với máy tính ta cần chuyển tất cả các dạng tín hiệu về
dạng số. Để thực hiện điều này, người nghiên cứu sử dụng IC chuyển đổi 8 kênh 8
bit ADC0809.
Tuy nhiên, do mức điện áp giữa đầu ra của vi điều khiển (0 đến 5V) và chuẩn nối
tiếp RS-232 (-10 đến +10) không tương thích nên người nghiên cứu đã sử dụng IC
chuyển đổi MAX232. Ngoài ra, để thực hiện được việc điều khiển từ máy tính trở
lại động cơ, người nghiên cứu thực hiện ngắt tín hiệu từ cảm biến đến động cơ
bằng phần mềm do vi điều khiển thực hiện. Như vậy, khi nhập số liệu từ máy tính,
các thông số này sẽ được truyền trực tiếp đến ECU thông qua vi điều khiển. Do
đó, để ECU nhận và xử lý được các tín hiệu này, ta phải chuyển tín hiệu số này
sang tín hiệu tương tự bằng IC chuyển đổi DAC M62358.
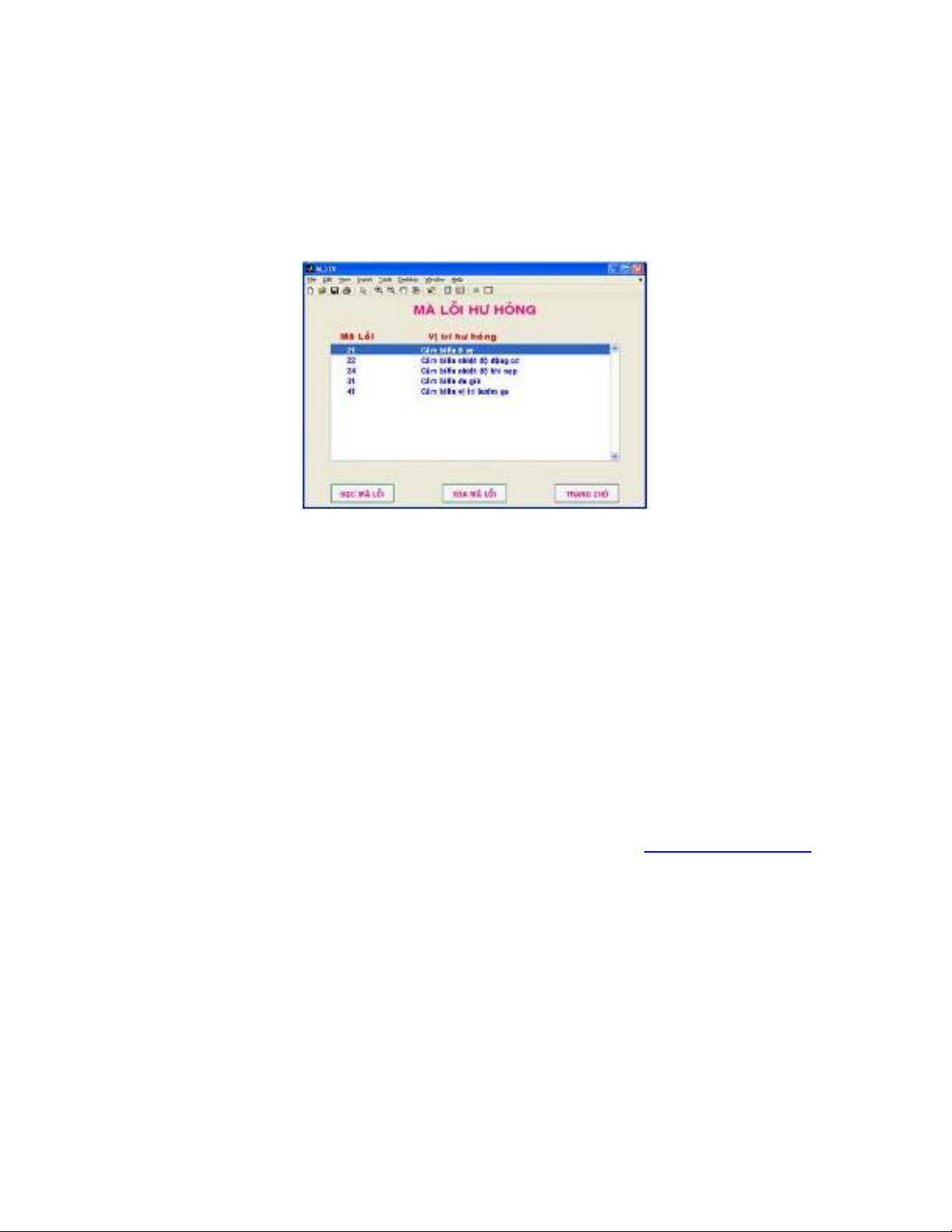
Ngoài ra, trên mạch còn sử dụng IC khuếch đại tín hiệu điều khiển từ LM324, IC
7805 chuyển đổi nguồn điện áp 5V cho bộ giao tiếp từ nguồn điện ắc quy 12V, IC
74HC14 tạo dao động cung cấp xung clock cho ADC0809, các transistor, .
Hình 1. Sơ đồ nguyên lý mạch giao tiếp
Thiết kế phần mềm bộ giao tiếp.
Giao thức truyền dữ liệu giữa máy tính và vi điều khiển được thực hiện theo kiểu
hỏi đáp. Nghĩa là nếu máy tính muốn gởi dữ liệu thì đầu tiên máy tính sẽ gởi một
tín hiệu (254), khi vi điều khiển nhận được tín hiệu này (254) thì gởi lại tín hiệu
(253) báo cho máy tính, máy tính sẽ gởi tiếp dữ liệu. Nếu vì lý do nào đó vi điều
khiển không nhận được, máy tính chờ hết thời gian xác định mà không nhận được
tín hiệu (253) báo thì máy tính sẽ gởi lại tín hiệu đó. Hướng truyền dữ liệu từ vi
điều khiển đến máy tính cũng tương tự.
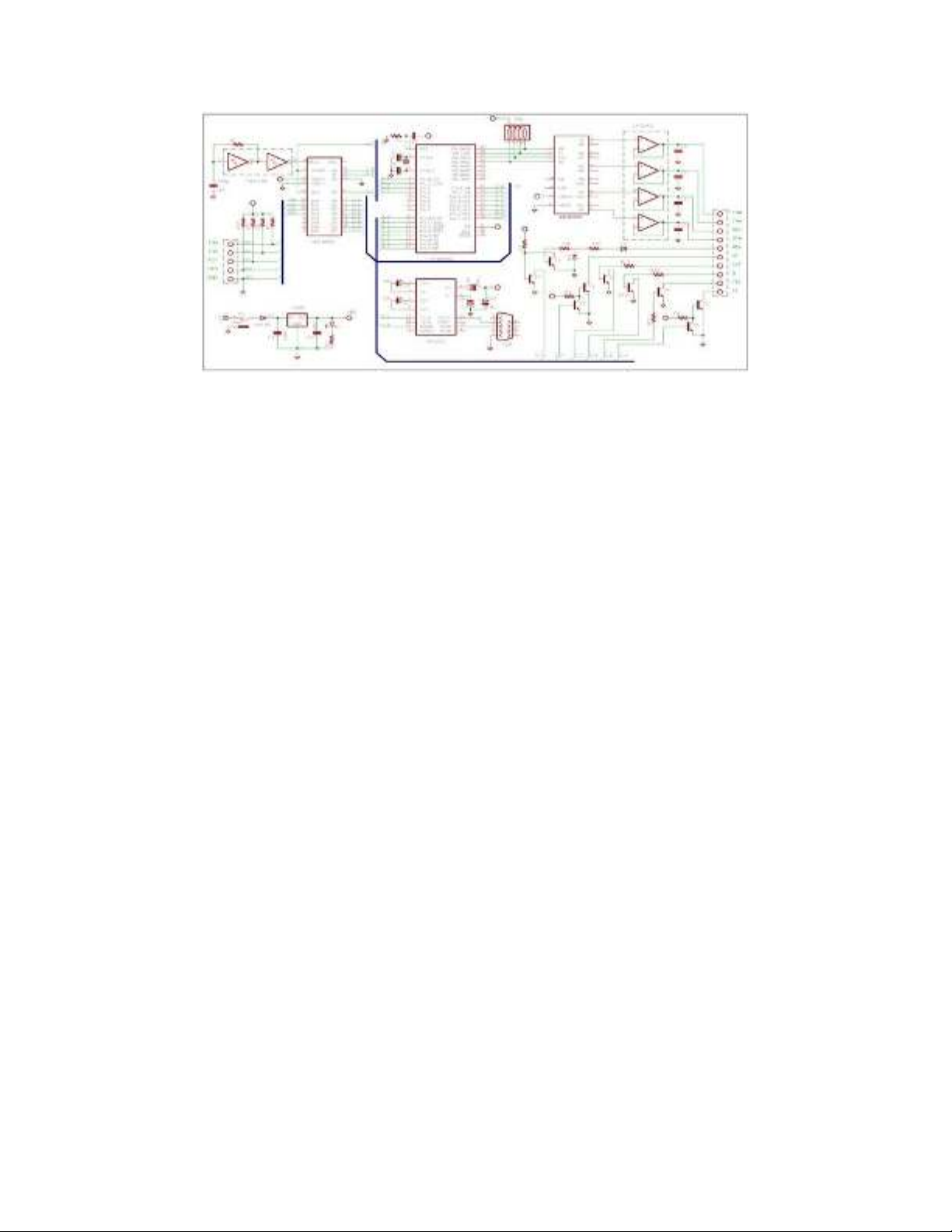
Lưu đồ chương trình chính của bộ giao tiếp trong đó gồm các chương trình con
sau:
- Call ADC: Chương trình con chuyển đổi tín hiệu tương tự - số
- Call DAC: Chương trình con chuyển đổi tín hiệu số - tương tự
- Call Load: Chương trình con chuyển dữ liệu nhận từ mày tính đưa đến chuyển
đổi DAC
- Call RPM: Chương trình con đo tốc độ động cơ
- Call TGP: Chương trình con đo thời gian phun nhiên liệu
- Call TGN: Chương trình con đo thời gian ngậm điện
Hình 2. Lưu đồ chương trình chính bộ giao tiếp.
Trong khi đang thực hiện chương trình chính nếu có xảy ra hiện tượng ngắt thì
chương trình chính tạm thời ngừng hoạt động để thực hiện các chương trình ngắt.
Sau khi thực hiện các chương trình ngắt xong, vi điều khiển sẽ quay về chương
trình chính tại vị trí ngừng lần trước.
Các chương trình ngắt được thực hiện theo lưu đồ hình 3






![Kiến thức cơ bản về điều khiển điện tử động cơ xăng [A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111124/gaunau123/135x160/dong_co_61__5197.jpg)