92
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ Trần Duy Hưng và ctv.
*Email: nvtruong.25890@gmail.com
TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ
TRƯỜNG ĐẠI HỌC HÙNG VƯƠNG
Tập 35, Số 2 (2024): 92 - 100
JOURNAL OF SCIENCE AND TECHNOLOGY
HUNG VUONG UNIVERSITY
Vol. 35, No. 2 (2024): 92 - 100
Email: tapchikhoahoc@hvu.edu.vn Website: www.jst.hvu.edu.vn
PHƯƠNG PHÁP KHỐNG CHẾ VÀ KIỂM TRA CHÂN FPGA
DỰA TRÊN TIÊU CHUẨN IEEE 1149.1 VÀ XJLINK
Trần Duy Hưng1, Bùi Hoàng Tùng1, Nguyễn Văn Trường1*, Chu Ngọc Hải1
1Trường Cao đẳng Công nghiệp Quốc phòng, Phú Thọ
Ngày nhận bài: 19/3/2024; Ngày chỉnh sửa: 04/6/2024; Ngày duyệt đăng: 10/6/2024
DOI: https://doi.org/10.59775/1859-3968.188
Tóm tắt
Trong bài viết này, chúng tôi đề xuất một phương pháp khống chế và kiểm tra khả năng hoạt động của các
chân chip FPGA khi đang hoạt động trong hệ thống điện điện tử dựa trên tiêu chuẩn IEEE 1149.1. Phương
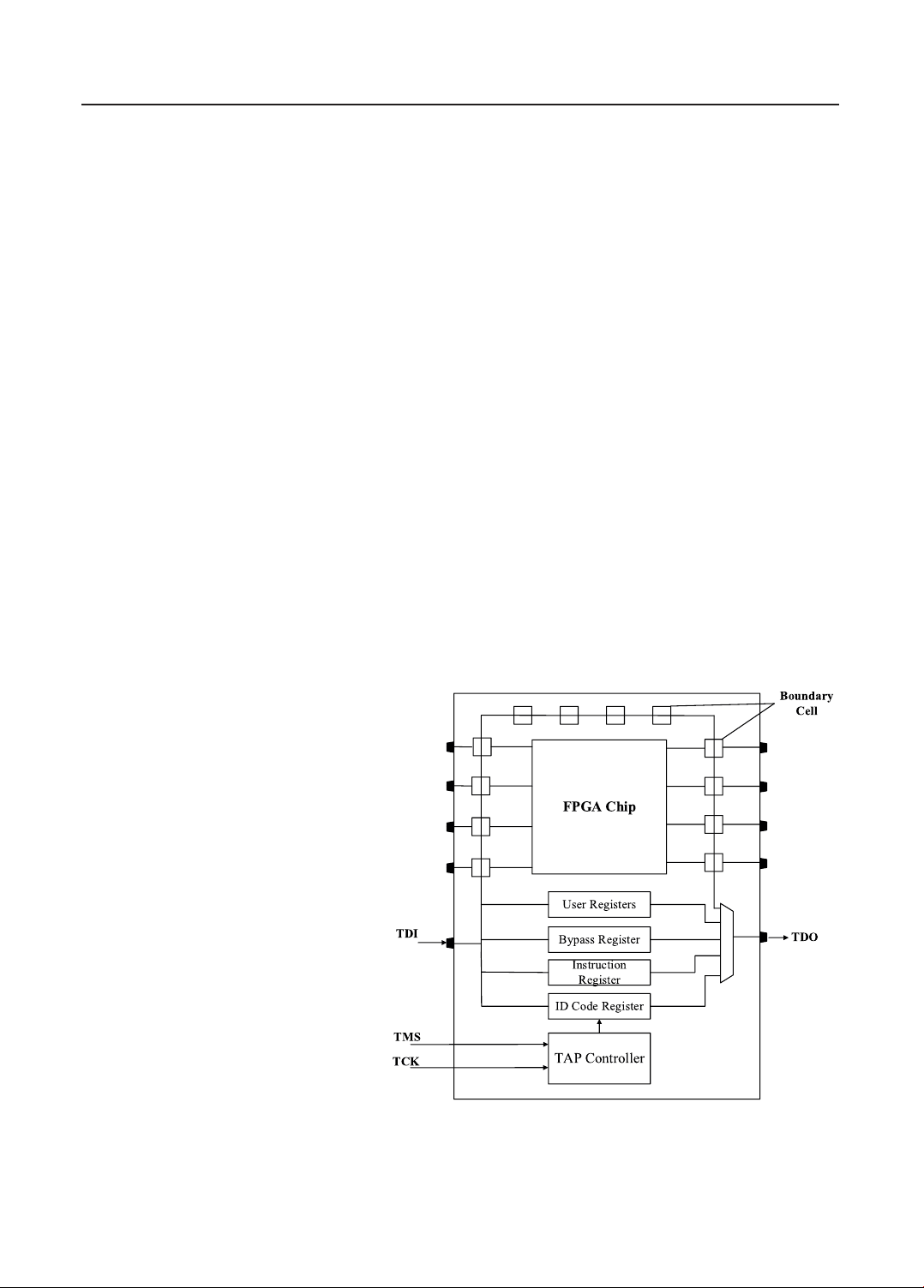
pháp sử dụng phần cứng XJLink thông qua nhân IP theo kết cấu quét biên tiêu chuẩn IEEE 1149.1 tích hợp bên
trong FPGA thực hiện khống chế và gài lỗi trên một số chân của chip để kiểm tra tính năng của các chân đó mà
không cần thực hiện các tác động vật lý hay phải tháo dỡ FPGA ra khỏi bo mạch. Kết quả thực nghiệm trên các
bo mạch Xilinx FPGA cho thấy, phương pháp đề xuất có độ tin cậy và tính linh hoạt cao, tốc độ khống chế nhanh
nhất lên tới 150MHz trong khi các chân khác của chip vẫn hoạt động bình thường. Đồng thời, phương pháp đề
xuất còn có thể thực hiện khống chế ngay sau khi FPGA được cấp nguồn.
Từ khóa: Công nghệ kiểm tra quét biên, tiêu chuẩn IEEE 1149.1, cổng JTAG, gài lỗi, Xilinx FPGA.
1. Đặt vấn đề
Trong những năm gần đây, công nghệ bán
dẫn phát triển giúp cho các vi xử lý như mảng
cổng lập trình được dạng trường FPGA, bộ
xử lý tín hiệu DSP, vi xử lý ARM ngày càng
nhỏ gọn, mật độ chân nhiều đem đến thách
thức lớn cho lĩnh vực kiểm tra, đảm bảo tính
chính xác trong quá trình hoạt động của các
chip. Đặc biệt là trong một số lĩnh vực đặc
thù như các thiết bị máy bay, tàu ngầm quân
sự, yêu cầu rất cao về tính hoạt động chính
xác, không xảy ra sự cố, trong trường hợp
xảy ra sự cố phải cần có biện pháp phát hiện
và khắc phục ngay lập tức để đảm bảo an
toàn cho người và thiết bị.
Phương pháp sử dụng phần mềm khống
chế và gài lỗi sai khác nhau vào các chân
của chip từ đó đánh giá chất lượng của chân
được gài là phương pháp phổ biến hiện nay.
Trong bài viết của tác giả Le đã phân tích
sâu về ứng dụng và thách thức của phương
pháp gài lỗi trong các hệ thống ảo [1]. Một
số kết quả tiêu biểu sử dụng phương pháp
gài lỗi kiểm tra và khống chế chân chip như:
Bộ gài lỗi tại các nút mạch số và mạch tương
tự thông qua đầu dò do Qin Haibo đề xuất