Tr l i mô hình hóa ả ờ
Lý thuy tế
1. Các ph ng trình cân b ng đi n áp c a các cu n dây máy phát đ ng b tr cươ ằ ệ ủ ộ ồ ộ ở ụ
a,b,c. Gi i thích các đ i l ng.ả ạ ượ
Tr l i ả ờ
Trong đó :
;;
Ph ng trình cân b ng cu n kích tươ ằ ở ộ ừ
2. Các ph ng trình t ng h t c a các cu n dây máy phát đ ng b tr c a,b,c.ươ ươ ỗ ừ ủ ộ ồ ộ ở ụ
Gi i thích các đ i l ng.ả ạ ượ
Tr l i ả ờ
Ph ng trình t ng h t nói lên r ng t thông c a các cu n ph thu c vào cácươ ươ ỗ ừ ằ ừ ủ ộ ụ ộ
h s h c m và dòng đi n c a các cu n trong m ch t ệ ố ỗ ả ệ ủ ộ ở ạ ừ

Cu n n đ nh theo tr c d c không b nh h ng b i các cu n dây bên statoộ ổ ị ụ ọ ị ả ưở ở ộ
3. Xét s thay đ i c a các h s h c m c a các cu n dây stator?ự ổ ủ ệ ố ỗ ả ủ ộ
Tr l i ả ờ
Ta th y 2 cu n đ t l ch nhau 1 góc là 120ấ ộ ặ ệ 0 nên góc này là âm và khi quay đ cượ
900 thì giá tr là nh nh t ị ỏ ấ
Đ i v i cu n kích t ố ớ ộ ừ
4. Xét s thay đ i c a các h s h c m c a các cu n dây stator và cu n n đ nh ?ự ổ ủ ệ ố ỗ ả ủ ộ ộ ổ ị
Tr l i :ả ờ
V i cu n n đ nh ớ ộ ổ ị
Cu n n đ nh theo tr c d c tr pha 90ộ ổ ị ụ ọ ễ 0 so v i tr c ngang ớ ụ
5. M i quan h gi a 2 h tr c (a,b,c) và (d,q)? Vi t bi u th c c a các đ i l ngố ệ ữ ệ ụ ế ể ứ ủ ạ ượ
đi n áp, dòng đi n, t thông th hi n m i quan h gi a 2 h tr c?ệ ệ ừ ể ệ ố ệ ữ ệ ụ
Tr l i :ả ờ
L y đ i l ng đi n áp đ xét ấ ạ ượ ệ ể
Hình
Dòng đi n ệ
T thông ừ
Ta th y t thông s m h n đi n áp 1 góc 90ấ ừ ớ ơ ệ 0 nên ta có
Hình
6. Trình bày MFĐ Đ ng b gi t ng và các ph ng trình t ng h c a chúngồ ộ ả ưở ươ ươ ỗ ủ
( Ψf, Ψd, Ψq, ΨD, ΨQ)?
Tr l i ả ờ
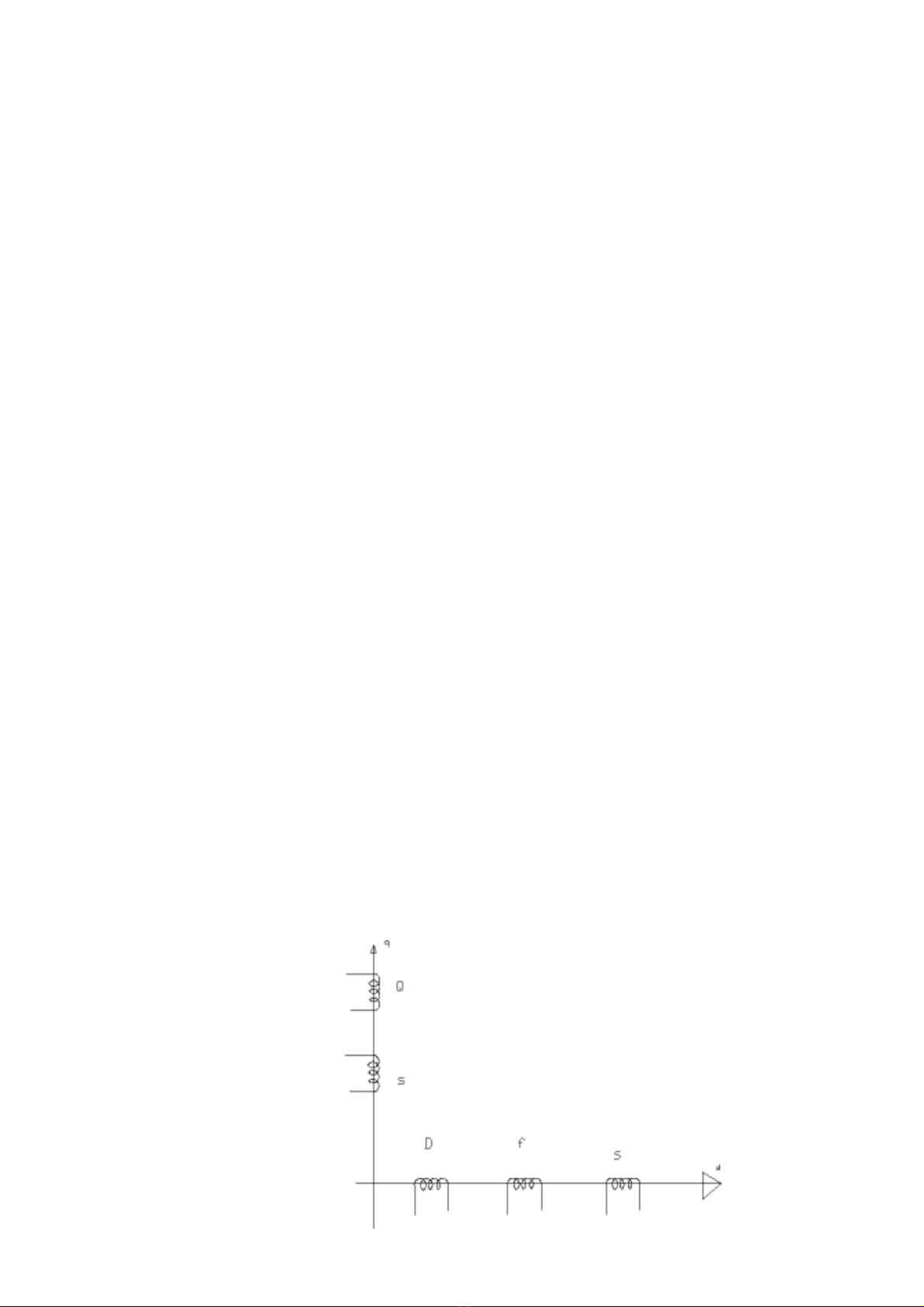
Máy đ ng b gi t ng đây là m y đ ng b g m các cu n gi t ng đ cồ ộ ả ưở ở ấ ồ ộ ồ ộ ả ưở ượ
đ t nên h tr c dq nh hình v g m cu n stato gi t ng , cu n n đ nh giặ ệ ụ ư ẽ ồ ộ ả ưở ộ ổ ị ả
t ng , cu n kích t gi t ngưở ộ ừ ả ưở
Hình

Nh v y các cu n n m trên 1 m t tr c s có m i quan h t ng h nhau ư ậ ộ ằ ộ ụ ẽ ố ệ ươ ỗ
Ta có :
7. Chuy n các ph ng trình sau v giá tr t ng đ i :ể ươ ề ị ươ ố
Ud= -r.id + + ω. Ψq
Uq= -r.iq - + ω. Ψd
Tr l iả ờ :
Đ chuy n các ph ng trình trên ta ch n các đ i l ng so sánh sau đây ể ể ươ ọ ạ ượ
biên đ đi n áp đ nh m c ộ ệ ị ứ
biên đ dòng đi n đ nh m c ộ ệ ị ứ
t ng tr đ nh m c ổ ở ị ứ
Ch n t thông lúc không t i ta có ọ ừ ả
T các giá tr trên b ng cách chia c 2 v cho Uừ ị ằ ả ế b ta thu đ c ph ng trình giá trượ ươ ở ị
t ng đ iươ ố
T i sao ph i chuy n các ph ng trình v d ng t ng đ i.ạ ả ể ươ ề ạ ươ ố
8. Chuy n các ph ng trình sau v giá tr t ng đ i ể ươ ề ị ươ ố Uf,UD,UQ, Ψf, Ψd, Ψq,ΨD,ΨQ ?
Tr l i ả ờ
1.
2.
3.
9. Đ n gi n hóa h pt máy phát đ ng bơ ả ệ ồ ộ ?
Tr l iả ờ :
Đ đ n gi n hóa máy phát đ ng b ta b qua các cu n n đ nh và các thành ph nể ơ ả ồ ộ ỏ ộ ổ ị ầ
bi n đ i không tu n hoàn và ta thu đ c ph ng trình nh sau ế ổ ầ ượ ươ ư
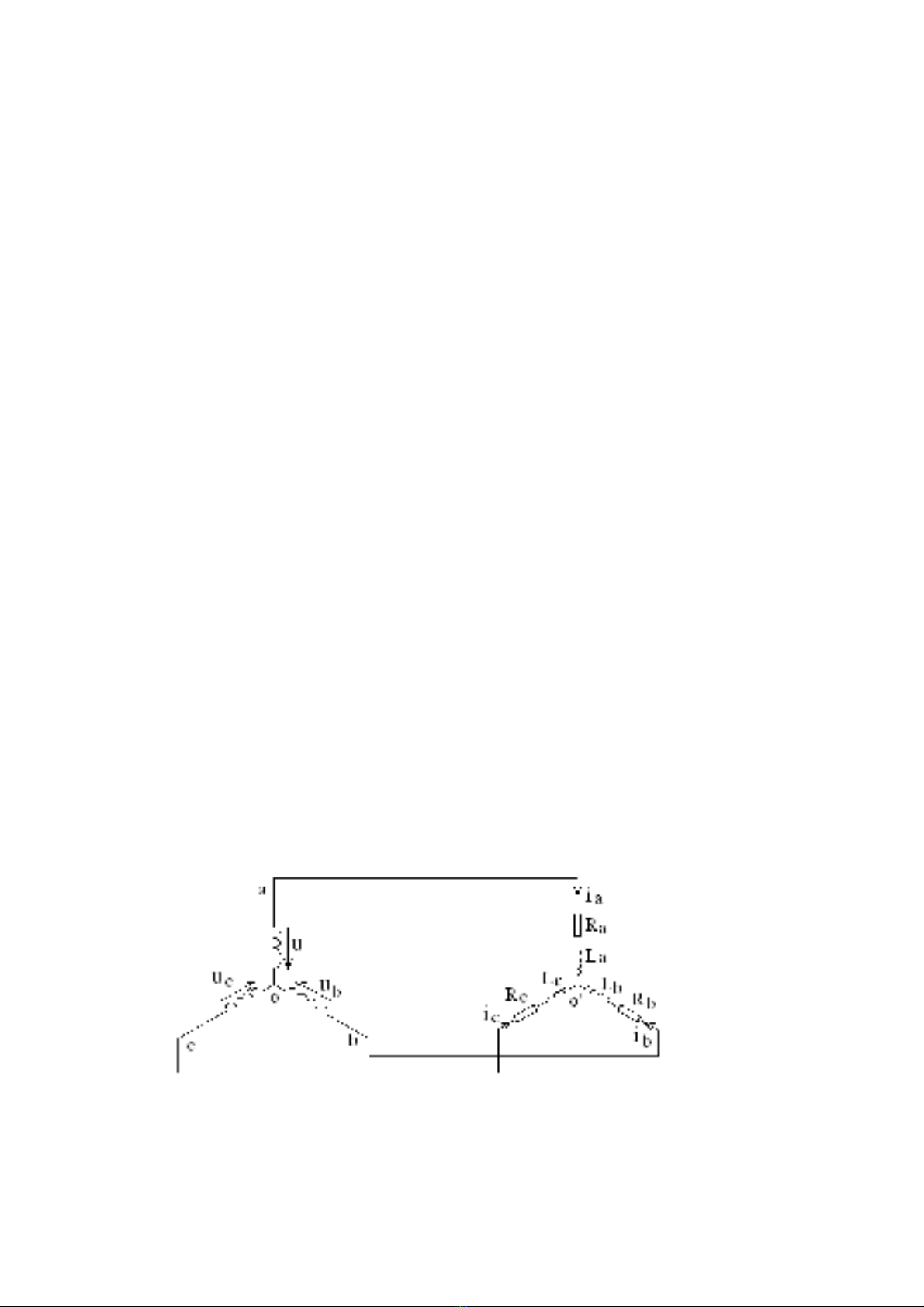
10. Trình bày mô hình toán h c c a t i đ i x ng ( R-L) vi t tr c (d,q)ọ ủ ả ố ứ ế ở ụ
Tr l i ả ờ
Ta có mô hình t i đ i x ng nh sau ả ố ứ ư
Nh v y t ng t nh cách làm v i máy đ ng b ta có ph ng trình h tr cư ậ ươ ự ư ớ ồ ộ ươ ở ệ ụ
dq nh sauư
11. Đ a h ph ng trình t i đ i x ng sang giá tr t ng đ iư ệ ươ ả ố ứ ị ươ ố ?

![Chương trình khung trình độ cao đẳng nghề Cắt gọt kim loại - Trường CĐN KTCN Dung Quất [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210417/tradaviahe20/135x160/1301618651048.jpg)
![Tổng hợp 58 câu hỏi về đồ án Chi tiết máy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2020/20201015/daohachi0512/135x160/9011602770055.jpg)











![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)






![Giáo trình Hàn TIG cơ bản (Ngành Hàn - CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/97451778728709.jpg)
